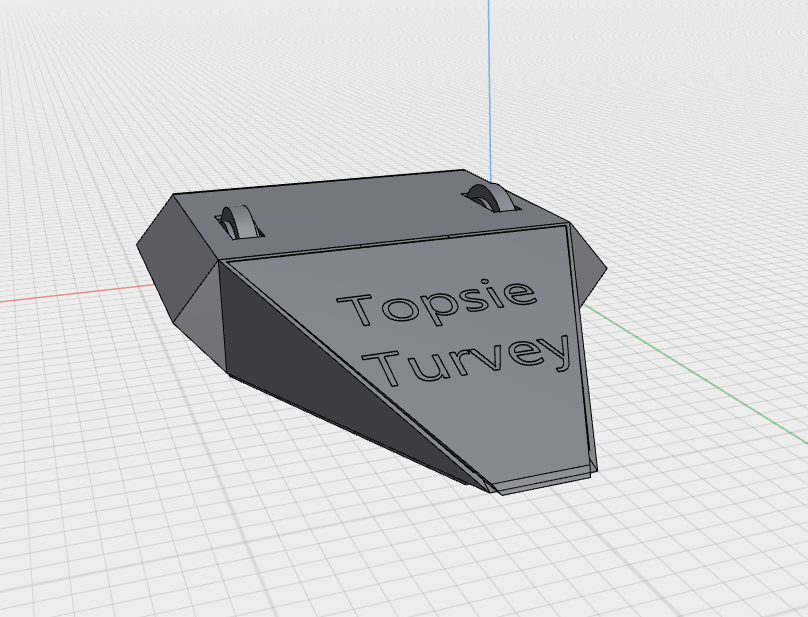
So I’m taking my first dive into Combat Robots, been playing around with a few ideas and finally landed on “Topsie Turvey” Topsie for short. A Flipper Bot that can drive any which way. Spent the last couple of days measuring and building the CAD Profile for her. This is my first ever Bot so feedback always welcome!
3 Likes
Looks pretty good. Far better than my first! I have 2 concerns. One is that although it’s invertable, the flipper won’t work, and I don’t know if it can self right using it. The second is that the writing on the front might be hard to see. Otherwise, good job for a first try.
1 Like
Building on Alex’s comments, having the wheels in the middle of the chassis may cause a couple of issues.
- If (When) an opponent gets underneath you, they won’t need to get that far underneath before they can lift one or both wheels of the ground. Mid wheels make you very manoeuvrable, but you can get beached easily.
- You’ll need to be careful with the weight distribution, too much weight behind the wheels and the front of the robot will more easily lift off the ground when you accelerate, making it hard to get underneath your opponents.
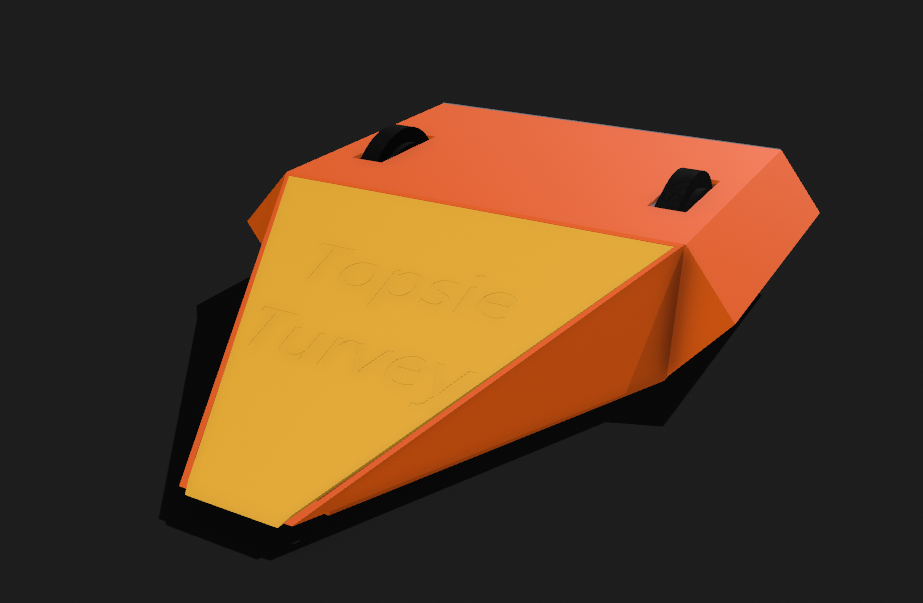
As for the text being hard to read, I find that a depth of 0.75mm makes it legible enough. You can always use paint to make it pop a bit more if needed.
2 Likes
I would be slightly worried about it getting stacked against the arena wall, as the wheels aren’t at the rear. It may also be more difficult to reverse off an opponent who gets underneath.
Look at the design of “Firestorm-like” robots - the wheels are at the back so they can always reverse off.
1 Like
Hey Guys, thanks for the feedback! Printed the first Prototype and it basically fell apart anyways so here are the revisions I have made:
- Increased Armour thickness
- Added Internal Supports in the Main Boddy and Flipper
- Moved Wheels to the Rear of the Bot
- Altered Depth of the Text on the Chassis
Sorry for the delay in updates had to move house in between starting this project and now lol. As for the concerns on whether it can self right or not I’ll see how it fairs when fully built and if it goes horribly wrong (which im expecting it will) I already have a Mk2 design in place. Images to follow when I get home from work!
Okay so The revised design of Mk1 Topsie Just didnt work as the whole thing had to be overhauled so Instead I have applied the feedback to Topsie Mk2. The only concern at the moment is still its ability to self right even though it can be driven inverted. Ill run with this design for now and if it proves useless I do have a Mk3 Sketch planned out.
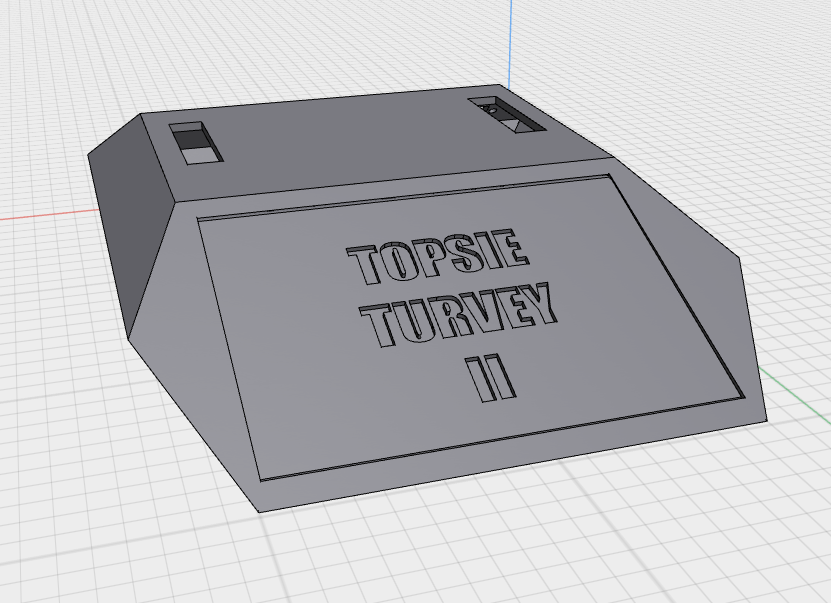
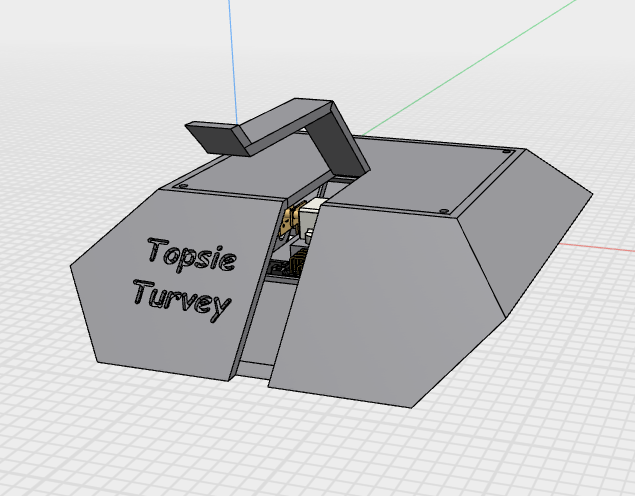
Right after several months of procrastination and the last week of banging my head on my keyboard, I present the MK3 and hopefully final design of Topsie. Changes I have Made:
- Replaced Flipper Panel with a lifting Arm
- Removed Ability to Invert so new lifting arm can self rite
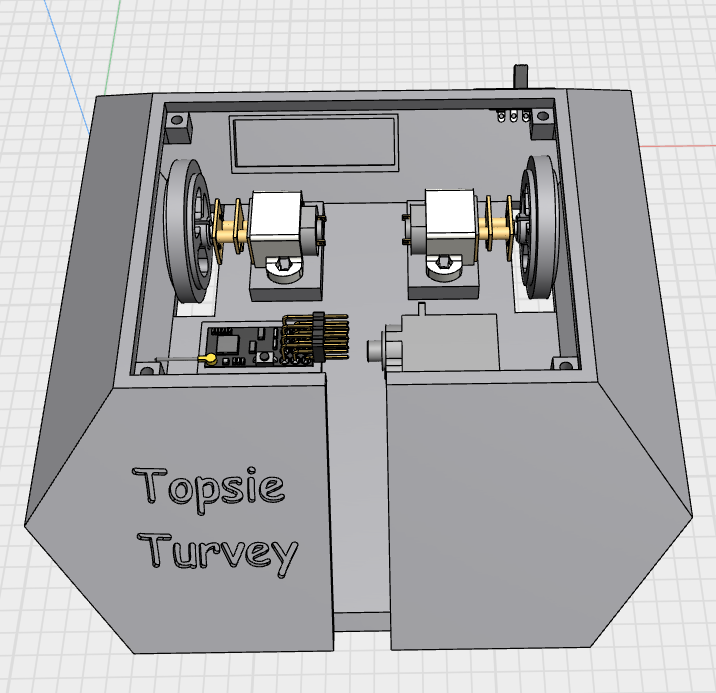
- Added Compartments for the receiver and lipo
- Altered custom fitting for the Servo
- Will be replacing Friction fitted hinge with an actual hinge for the lifting arm
Now I’ve been staring at the Example for how to use a servo for the last 4 days and I still have no idea where to place the servo within the bot. I need it to lift high enough to self rite but I cant wrap my head around:
- Placement of the Servo
- Where to put ledge to attach the arm to the servo
- How to design the mechanism itself
I’m sorry if these sound like stupid questions, but any help with how to actually get the flipper working, or at least get everything in the right place to get it working would be great.
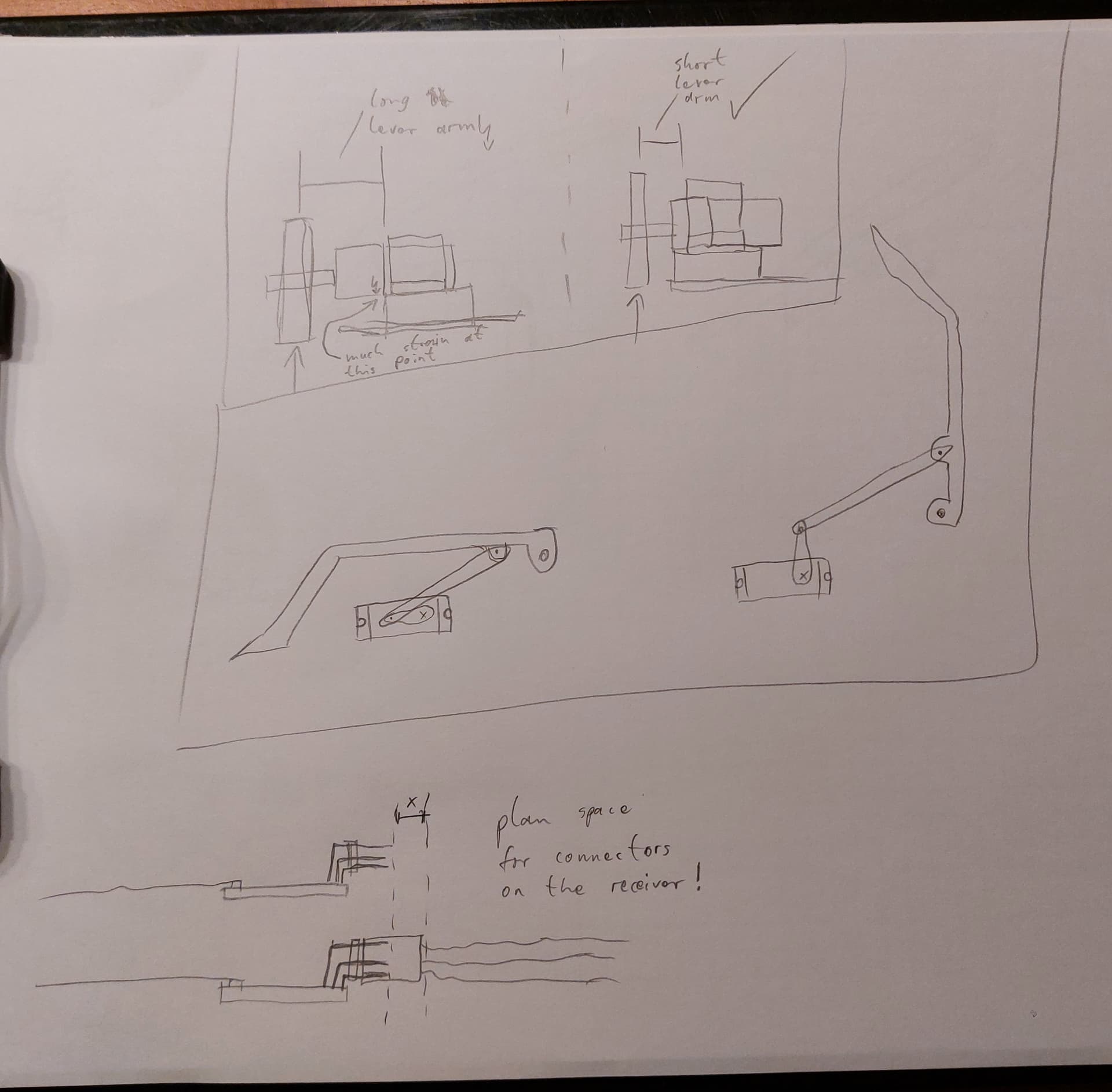
I hope these sketches are mostly self explanatory.
I recommend to place change the motor mounting so that the motors do not stick out of the mounts that much.
The way your receiver is placed, there is not enough space betwenn it and the servo. The connectors from the servo and the escs will beed some space.
And a rough proposal for a flipper link.
2 Likes
Amazing! That sketch makes all the sense I need. Thank you!
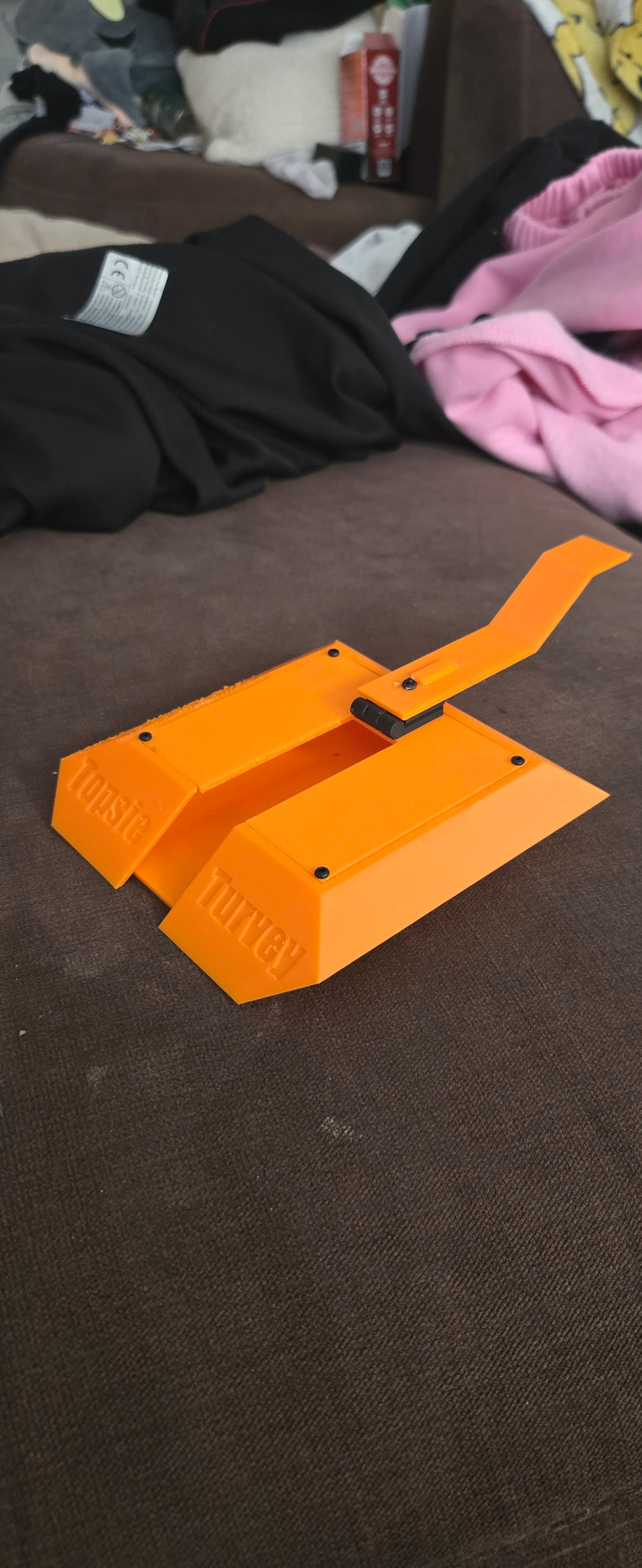
Okay so, after a long while I finally have my 3d printer and finally printed a prototype of Topsie woohoo!

However 2 massively glaring issues:
- The Shell/Chassis despite being within size regulation is alot larger than alot of other antweights ive seen. This leads into issue 2.
- For just being the shell and flipping arm its quite weighty and im pretty sure she’ll be overweight with all the electronics in.
A third issue I found is that she is quite difficult to assemble. This is probably down to the shape and the fact that the only access to the internals is that top plate. The inside is quite a large cavity so such a small access point will mean fitting every thing will be difficult.
This means im going to nees to make the following revisions:
- Thin the armour out
- Condense the Design so electronics are more snug
- With a smaller design, extend the base of the flipping arm
- Split the bot into 3 pieces. Base, Main Body, Top Plate
Well looks like I gotta get back to work. Any more feedback is welcome!
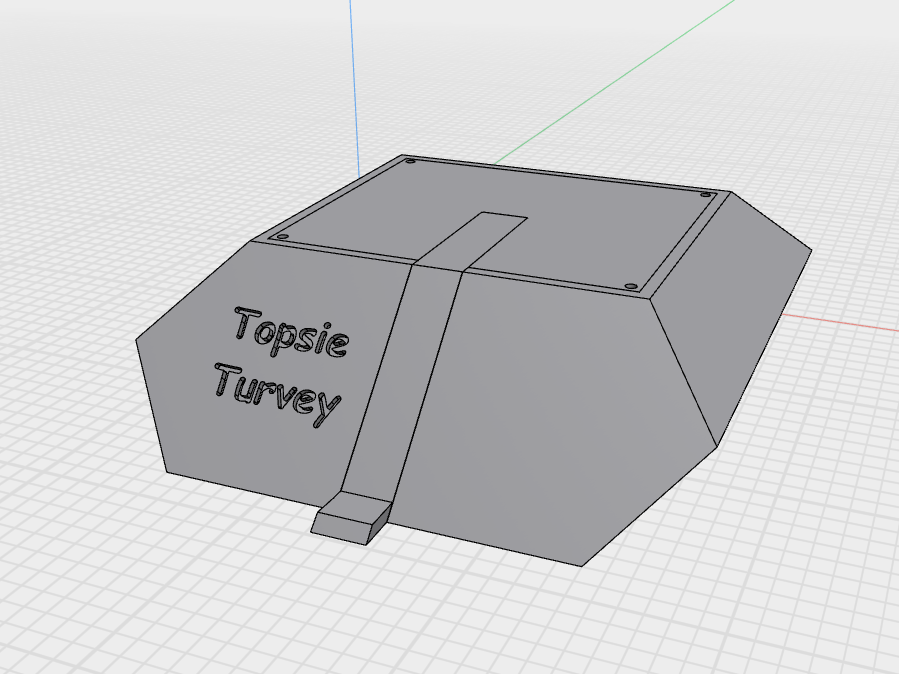
Revisions Made and Topsie is now:
- Smaller but large enough to hold all the electronics
- Thinner Armour
- Lighter
- Split into 3 different parts (so much easier to build)
- Wider Lifting Arm
- Longer plate to get under other bots on the lifting arm
- Moved the switch hole to the base
- Changed to text on front face and bottom plate
- Changed wheel type to the 22m wheels
There are still some small measurment adjustments i need to make but nothing overly important. Just need to get xmas out the way then Ill be buying all the electronics, print the first true Topsie and then its fighting time!


2 Likes