I am currently building my first beetleweight robot and have hit a few roadblocks but have been able to figure them out, however this one has be stumped.
After installing a new ESC for one of the drive sides I turn the bot on and the transmitter no longer connects, despite it being the same reciever I have been using the whole time, so I know that it is bound. I have tried fully charging the battery incase it was low, tested another reciever that I know works, but each to no avail. If anyone has any idea what could be causing this as it seems like the rx is not even recieving power, please advise. I’ve included a video below to show the problem.
Any advice would be great.
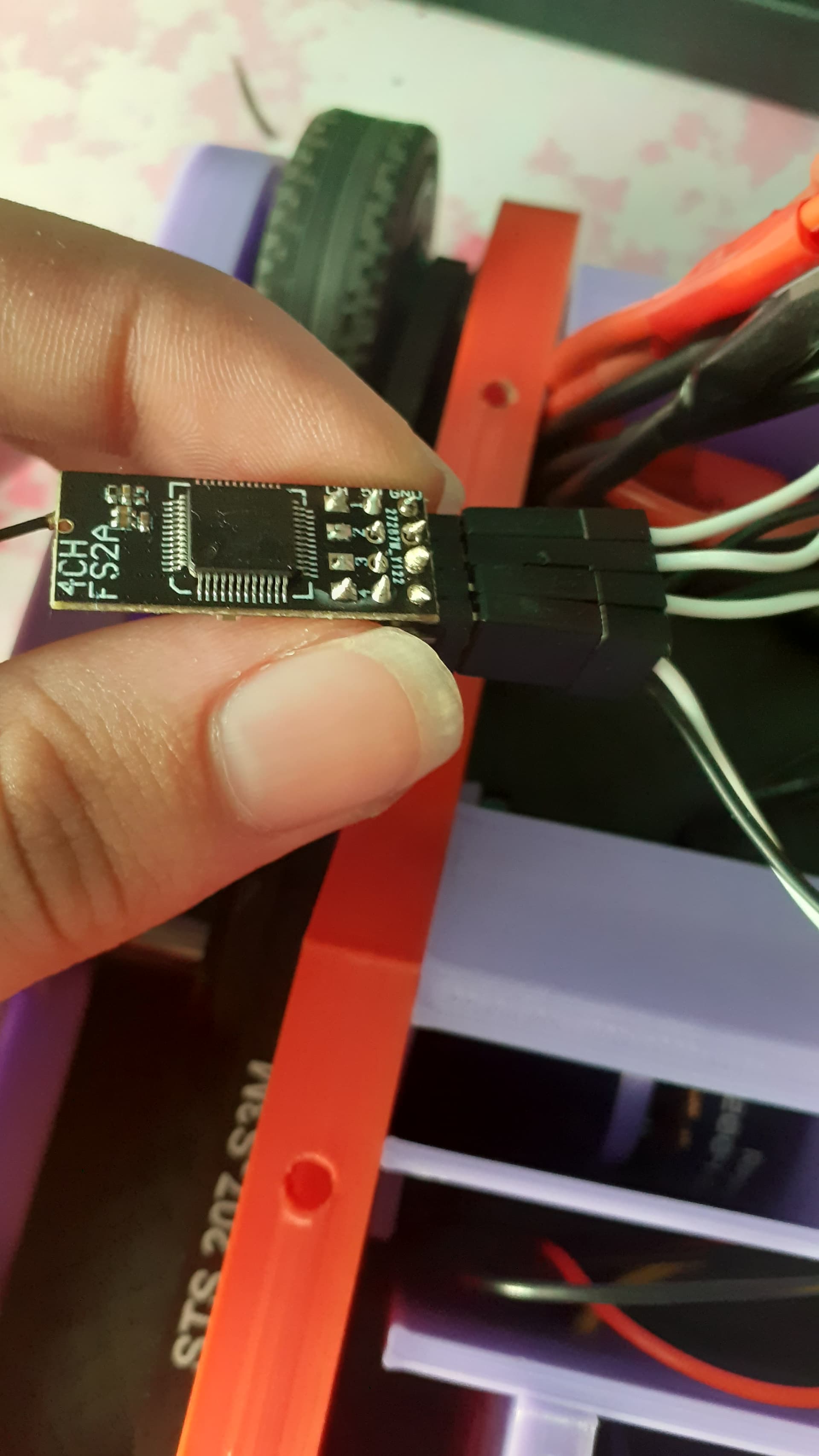
To me in that photo it looks like you’ve got the servo plugs plugged in to the receiver upside down - from the view of the photo you want the black wires (ground) at the top and white wires (signal) at the bottom
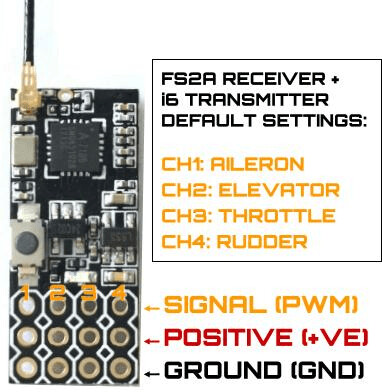
this image from our receiver guide should hopefully help:
Oh my goodness, thank you so much. You have no idea how much I am facepalming right now. Switched them around and now the bot is working again. Thank you so so so much.