Hi folks,
Firstly an apology for asking a question on my very first post on your forum, poor form I know!
Secondly may I express close to shear joy finding an actual old skool forum for a hobby and not just a SubReddit or a Facebook group!
Moving onto my question(s), I have searched but haven’t quite got the confirmation of answer I was seeking, so without further ado:
Question(s):
Q1/ Are Bluetooth or 2.4 GHZ WiFi (which is really somewhere between 2.4 and 2.5) allowed for control in UK Ant weight events? i.e. are they close enough to the normative 2.45Ghz in the rules to be allowed?
Q1.1/ If so, is anyone doing so?
Q1.2/ Does the presence of so many much more powerful 2.4ish GHz transmitters cause significant issues for the weedy Bluetooth or WiFi signals in practice?
Question context:
I stumbled onto one of your videos on YouTube a few days ago and learnt of the existence of the Ant weight class!
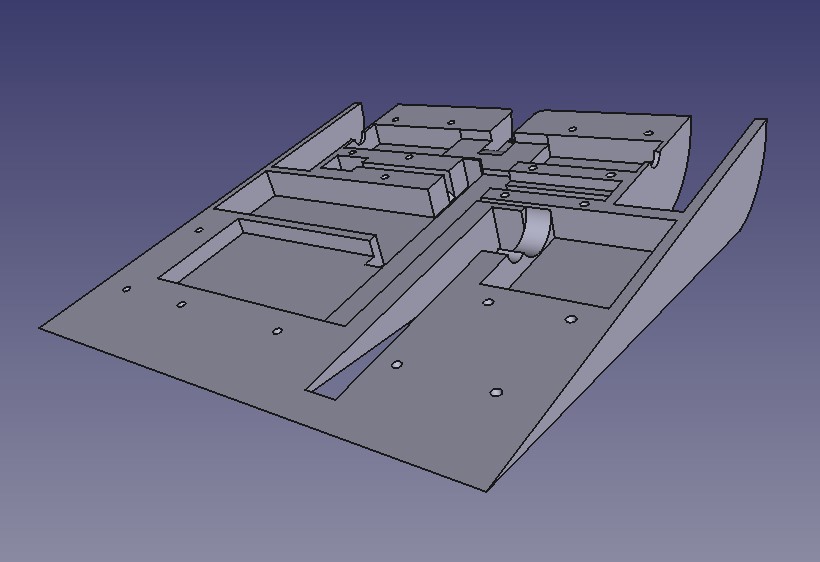
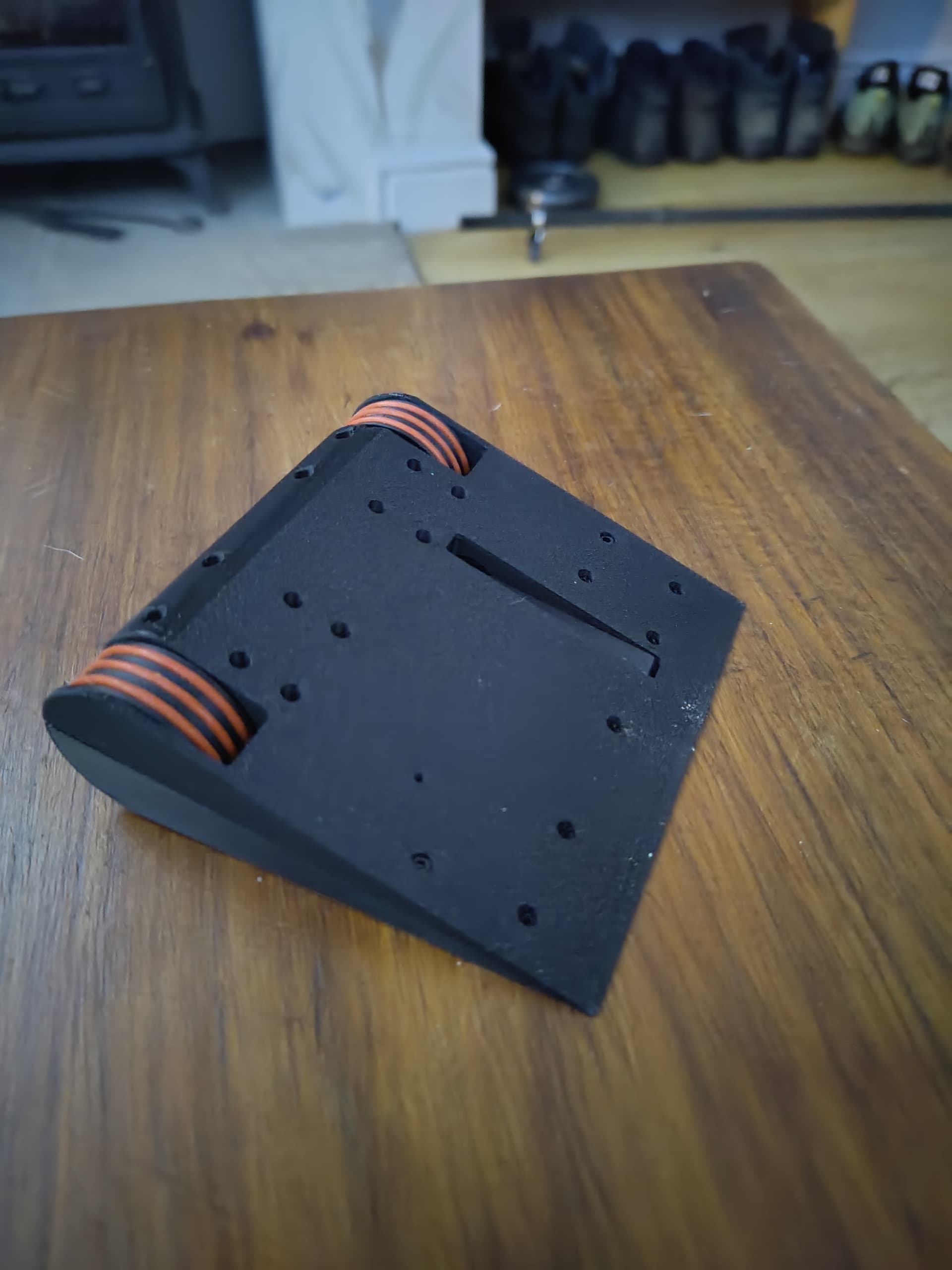
Excellent thought I; as I was already thinking of building a couple of 3d printed ESP32+phone app controlled bots to battle my nieces and nephews with, for fun but also to sew the seeds of interest in science and engineering… Now slightly introduced to the nomenclature I believe what I was planning is best described as a couple of non-destructive plastic ants.
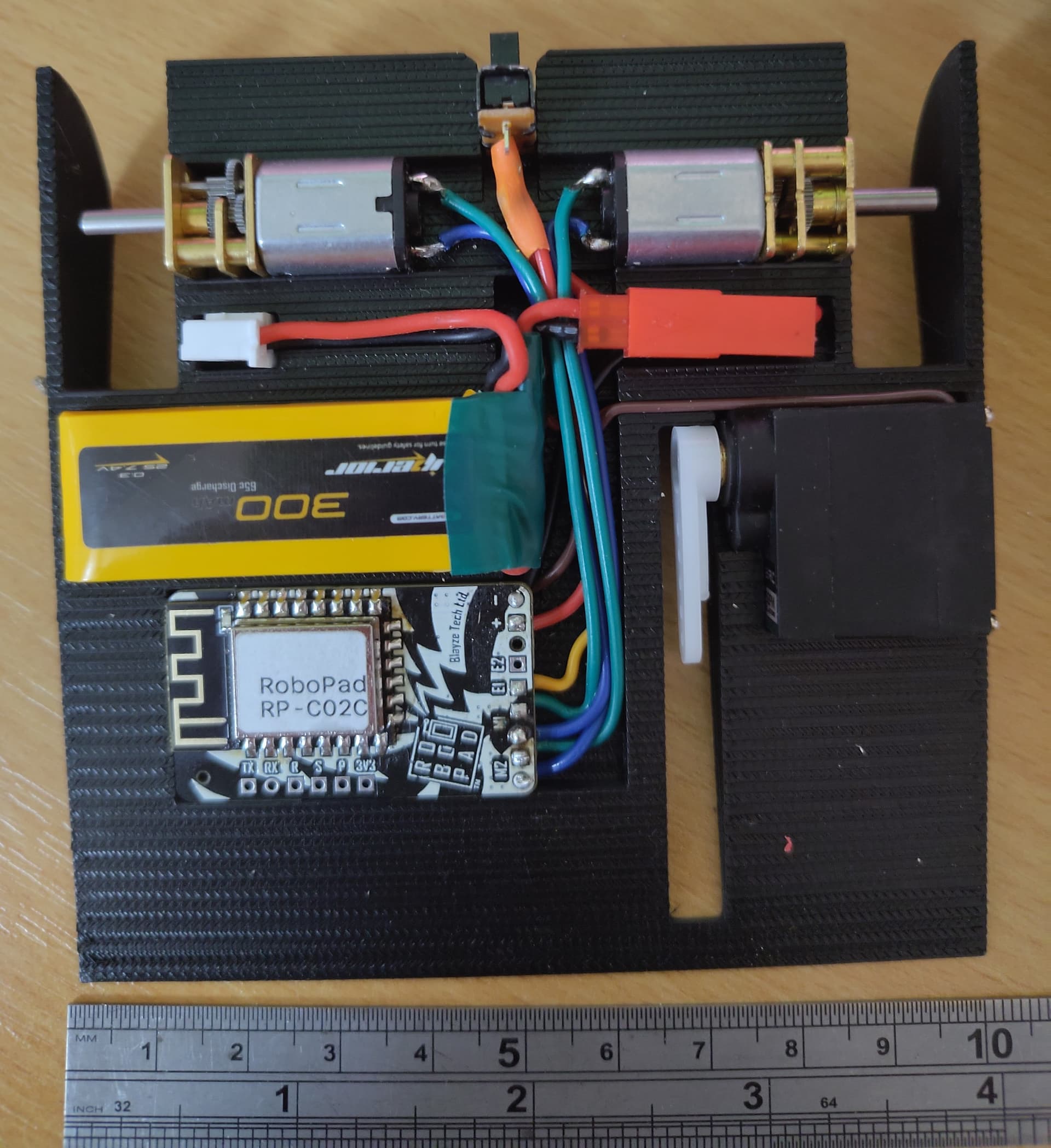
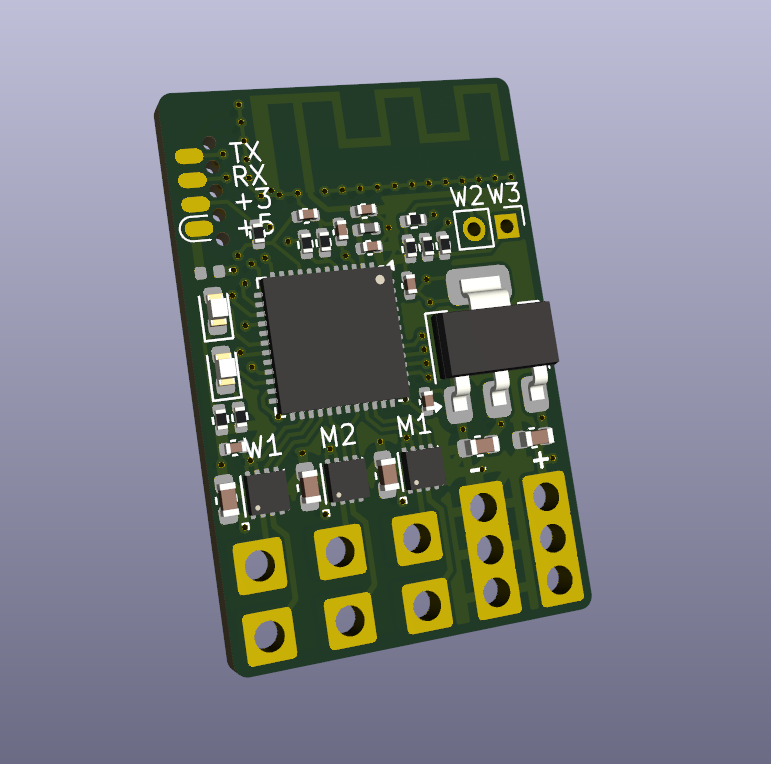
I have a bit of experience with microcontrollers and hobby electronics so my go to to keep costs down will be to use a small ESP32 devboard and an appropriate H-bridge breakout board and use mine and my wifes smartphones as the controllers with an app (possibly just blynk or remoteXY if I’m feeling lazy). A transmitted rolling alive counter from the phones and an if statement in the esp code should provide a reliable failsafing strategy.
If my low cost control strategy is legal I might well be inclined to follow the rest of the ant weight rules and one day popup at an event. Otherwise if my plastic ants will be constrained to the back garden arena I’ll give myself some freedom and probably package some larger batteries so we can play longer.
:+)