I have decided to pick up my build log from where I left off on the old FRA forum: Attitude Adjuster (Beetleweight).
I’ll do a brief catch-up about what I can remember, and go into more detail about more recent things.
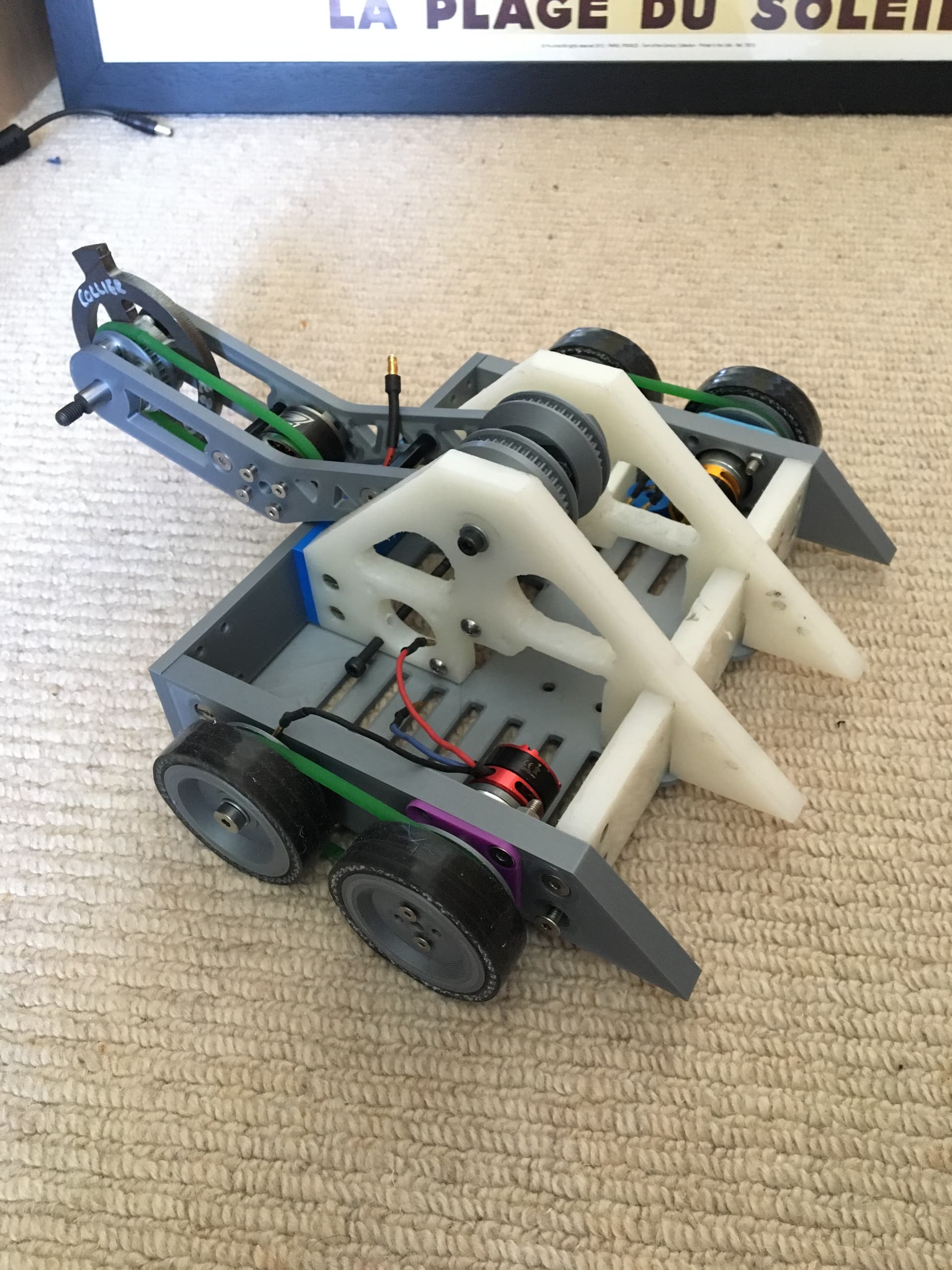
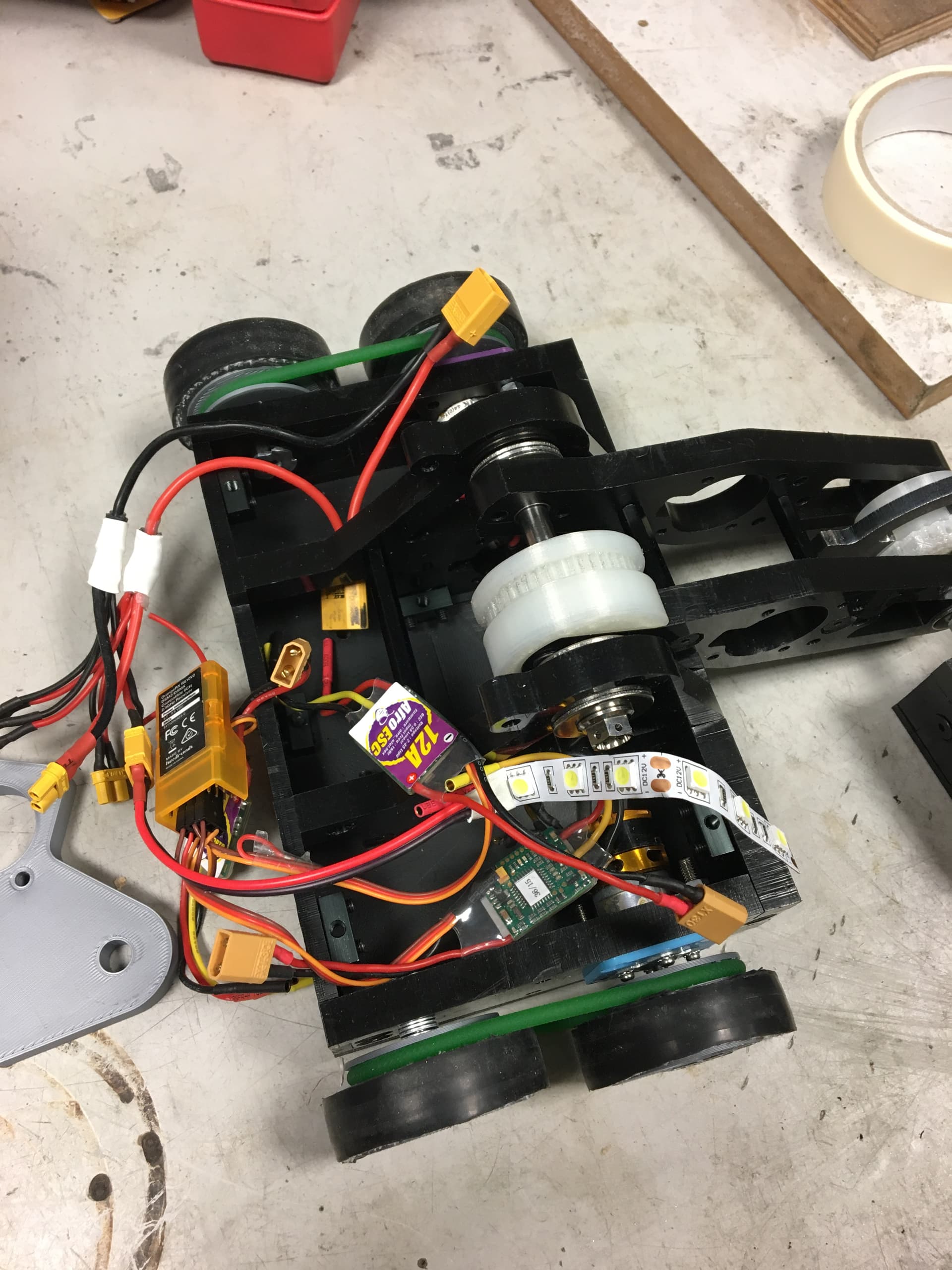
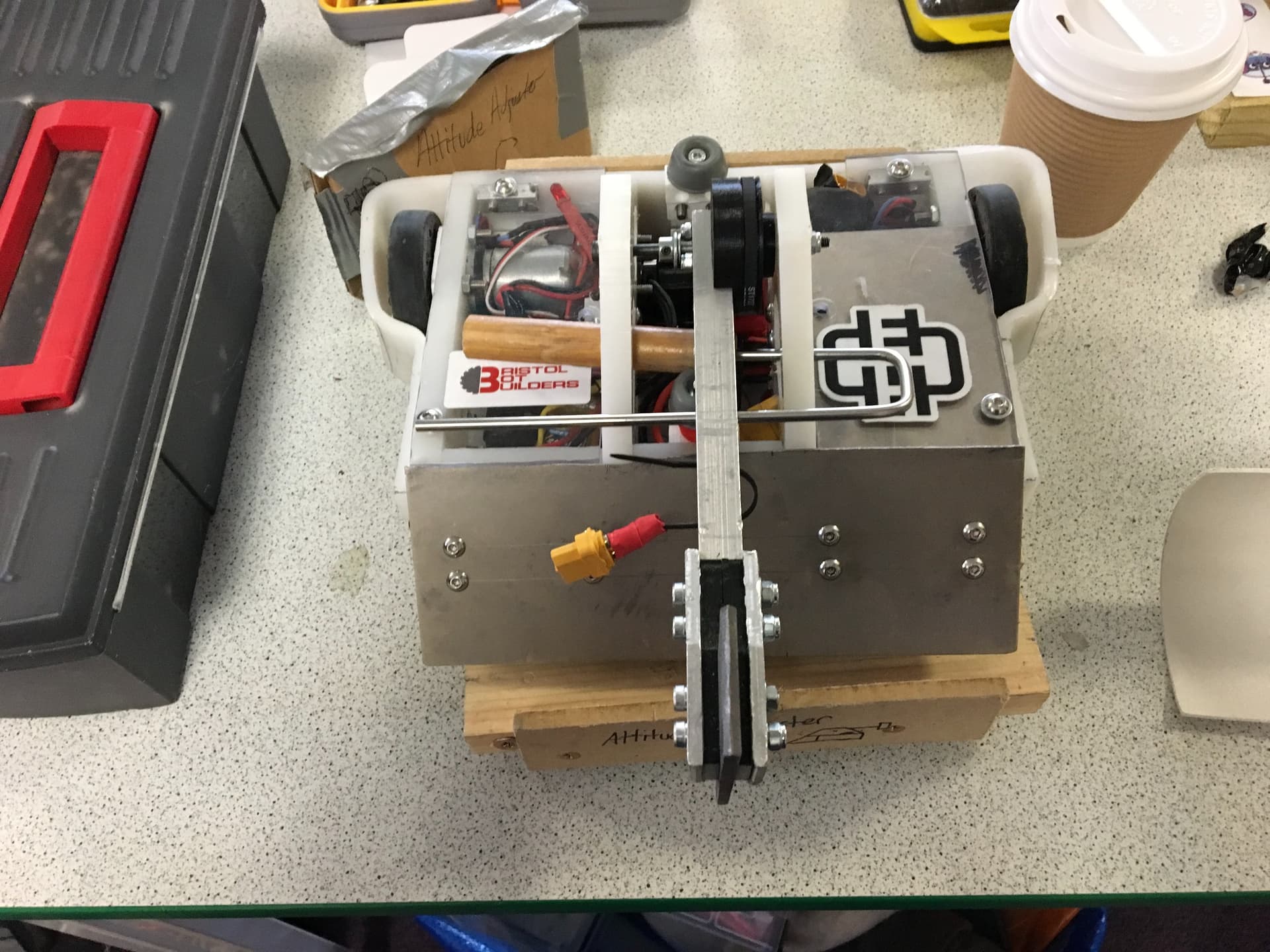
Let’s start with the last events for v1 of Attitude Adjuster! This was my first bot, made by hand out of HDPE, mainly using a table saw and a mitre saw. Heavily inspired by Snappy and This Is Not A Drill, with an axe/hammer because of Beta!

Euros 2019
The axe worked a bit more reliably for this event, I switched from the DYS + 25mm spur gearboxes to DYS + Rotalink conversions for the arm, after chatting to people at BBB. The idea behind it is that the planetary gearboxes are more reliable than the spur gears since the force inside the gearbox is balanced, so the gearbox doesn’t flex so much. This was pretty successful, I used the rotalinks in the arm until 2023.
The event was fun, I once again fought Joe with Crabsolutely Clawful and had a great time with some whiteboards. However the robot itself was still a bit rubbish, I faced a Fingertech beater bar that made me realise that the wedge front was a bit too thin and unsuited to fighting verts.
BITB 2019
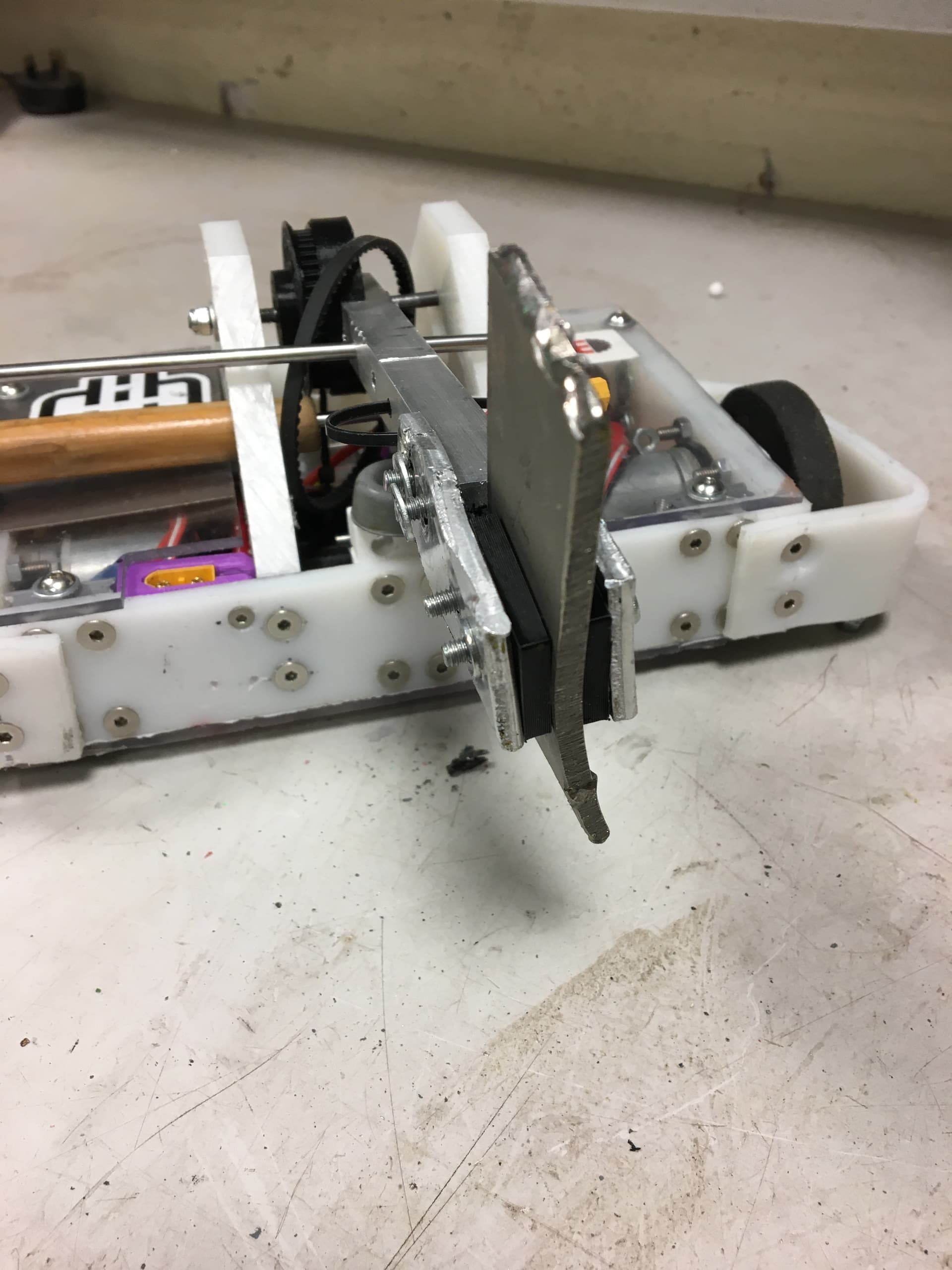
Enter my first set of forks! I made a front attachment with some janky, handmade 3mm titanium forks. They worked OK, they were all slightly different sizes which actually helped to get under people.

For the first BITB I was a competitor more than an EO. I did OK in the tournament, I replaced the Fingertech pulleys in the axe drive with 3D-printed PLA pulleys that exploded every match as I didn’t really know what I was doing. Luckily I had plenty of spares. I also tried magnets, but they didn’t really work for me.
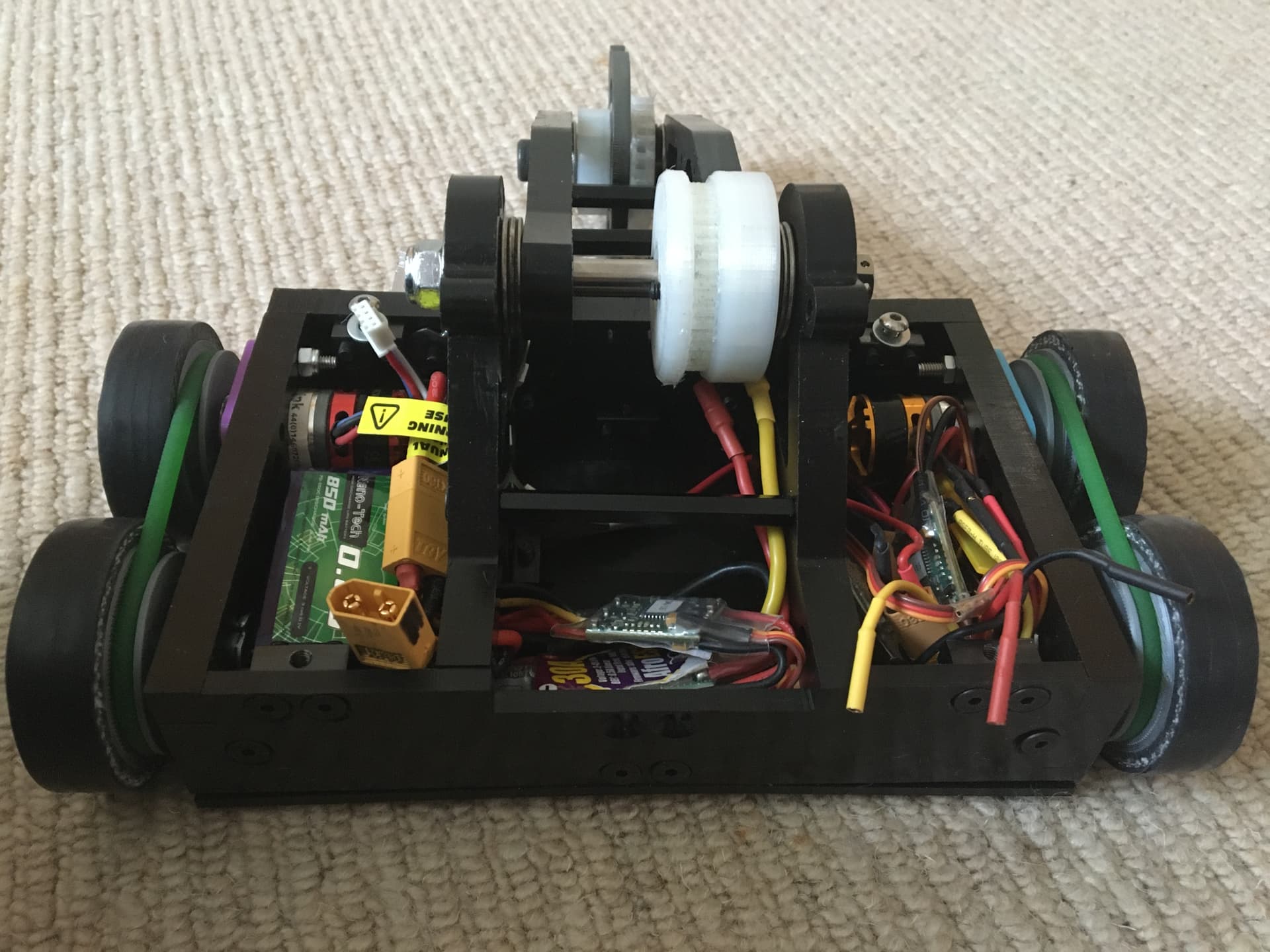
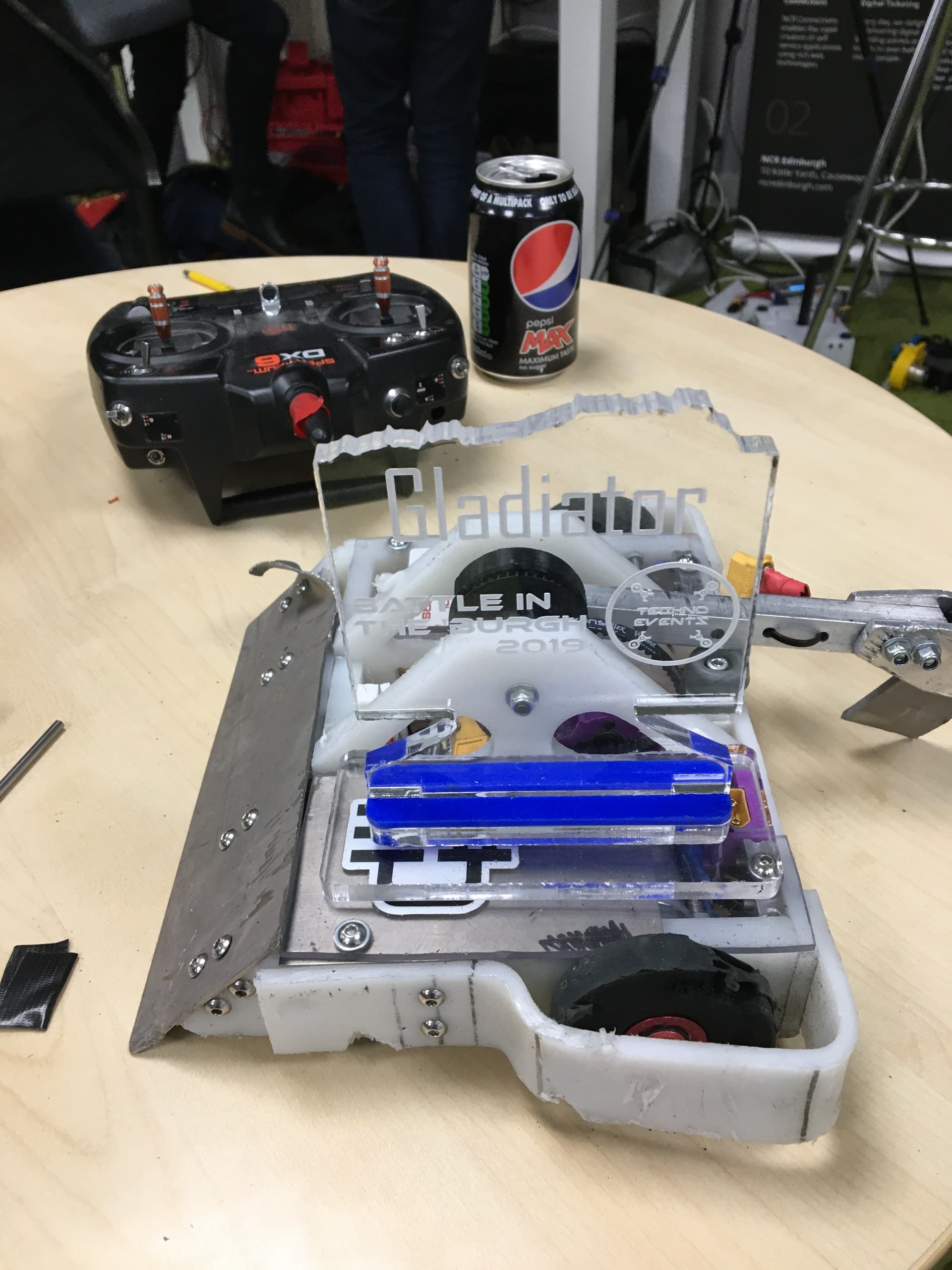
The robot shone at the Gladiator. The battery was way too big, 1000mAh 3S for a simple 2WD brushed drive and weapon, so my strategy was to stay out of trouble, not use the weapon so it couldn’t explode and out-last everyone else. With a couple of minor scrapes, it won its first trophy!


Attitude Adjuster v1 had been a good experience to learn on. It was a simple bot that I made by hand with basic power tools. I had encountered many issues and had iterated on it as far as it could go, with 3 separate designs for weapon bulkheads. I had travelled with it across the UK and made friends at events.
It had several major issues though:
- It didn’t do any damage (not that I was expecting it to - it was deliberately not too scary)
- The weight distribution was bad because the wheels were too far back, and in particular it had no traction when the arm was extended
- The robot was too big so there was a lot of wasted weight
- The armour was too thin, in particular, the front ti wedge
- It was all handmade, so it was all a bit janky, I didn’t have too many spares and I was a bit too scared of it being written off as I’d spent a lot of time on it
I also wanted to retire it on a high and redesign it from the ground up.
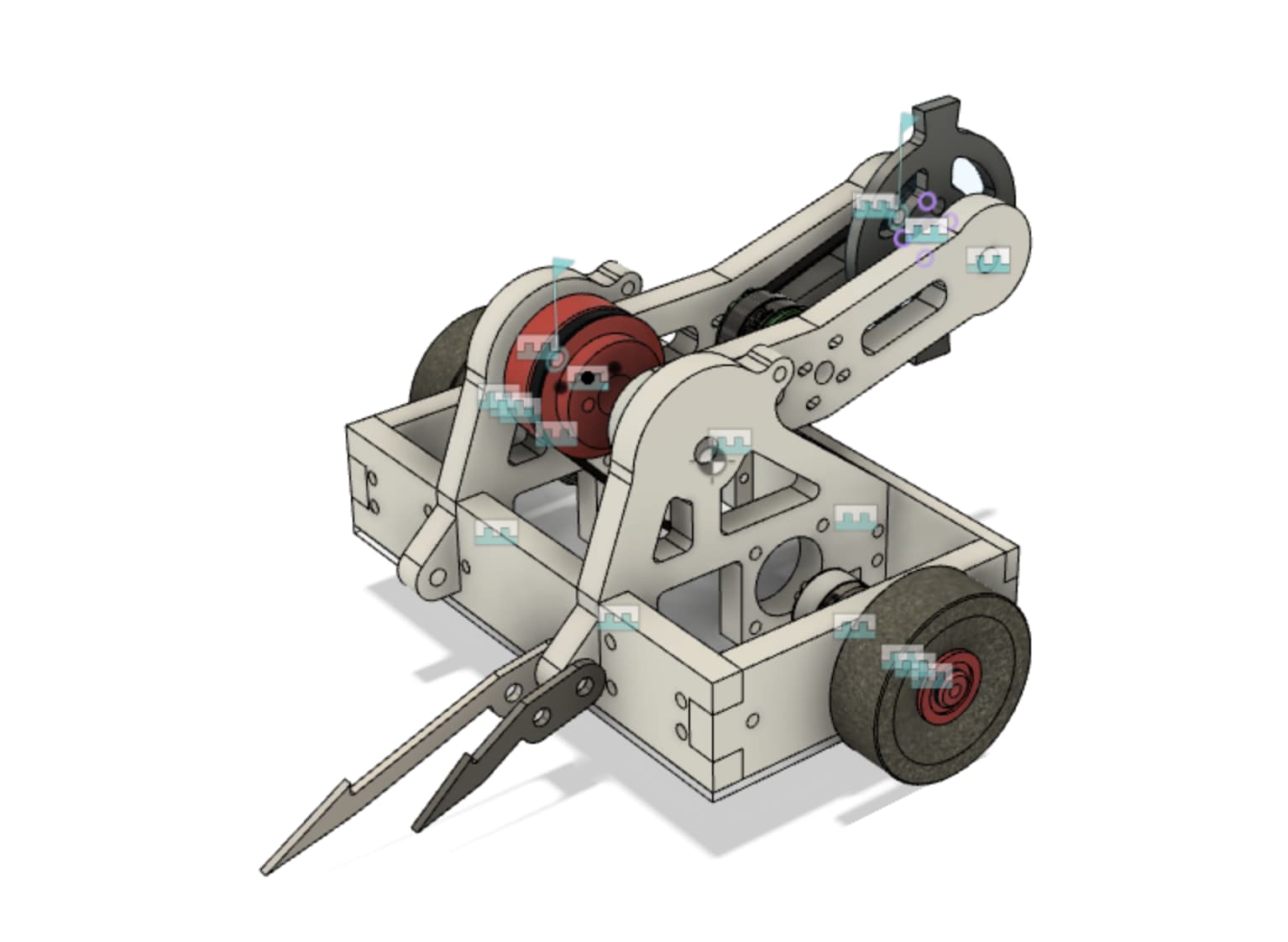
I had planned to skip BBB UWE in Feb 2020 to go to some events later in the year (including September 2020 Norwalk) with a new design in mind. However, then the pandemic happened… This is as far as I got with my late 2019/early 2020 CAD before giving the robots a break for a year.
So that was the end of the line for this version of Attitude Adjuster! It still lives on my robot shelf, as a reminder of how far I’ve come.