Attitude Adjuster v2
The pandemic happened, so I gave the robots a break for a bit. However, in 2021 I heard rumours of an event at Rapture Gaming Festival, which gave me something to aim for. In addition, I had been watching NHRL so I knew I wanted to do that at some point, especially since I have family around 3-4 hours away.
I decided to redesign the bot from the ground up, re-using little from the previous version. I made some design choices for the new version of Attitude Adjuster:
- Replace the axe with a hammersaw - the axe was fun but I wanted knock-out power. I had seen Sawblaze have success with their hammersaw, so I decided to replicate it
- Fix the weight distribution issues when the arm is extended by going to belt-driven 4WD
- Use silicon hose wheels (like Bourbon) to give more grip than the foam wheels, with pololu hubs in the drive wheels
- Go for Hardox forks as the primary configuration instead of the titanium wedge
- Go back to full brushless for speed and power, using rotalink conversions instead of the brushed 25mm motors.
I decided to keep the same rotalink weapon motor and arm belt geometry, as I’d finally worked out the right number of teeth and distance between motor and arm. One major difference is that I now had a printer that could print nylon, so I could make the pulleys out of Taulman Alloy 910. I kept the HTD 3M pulleys and belts, and again modelled some custom pulleys with an unusual number of teeth for optimal belt tension, 15:43.
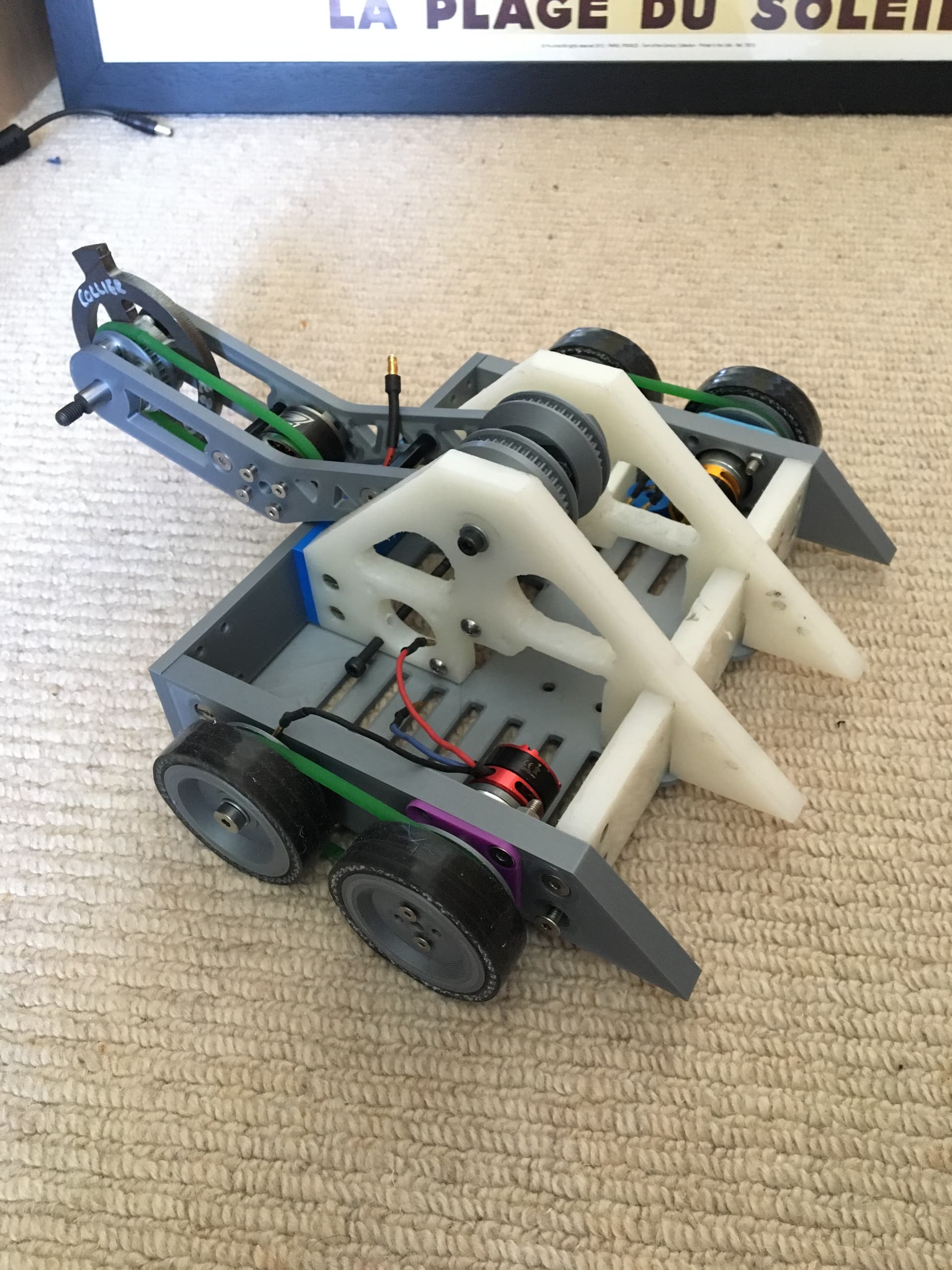
This is an early prototype, with some parts from the first AA and a 3d printed chassis and arm. It inspired the 4wd geometry but wasn’t used in the end. This chassis is a bit longer and wider than the final design but is about the same height.
I went in on a group Charles Day order to get my first waterjet cut Hardox parts - some disks and some forks. I went for a simple symmetrical design for my first spinner, as I didn’t want to complicate things. I designed two lengths of forks, as I discovered accidentally that if the forks were different lengths then it gives you two chances to get under your opponent. Fun fact - the short forks from this order were donated to Jevan at BBB Brawl 2024. I also had some forks that were designed to keep drums at bay.
I also designed a sportsman config, with a kinked aluminium axe arm and pointy hardox head. I donated one of those to David Harrison to use on Axe Wobba, and subsequently gave him the CAD.
I wanted to make two copies of the robot as I planned to take it to NHRL, so I decided to have the chassis CNC cut by Nat from Team SC, who did a great job. Using CNC meant that I wasn’t limited to 45 degree angles. It also meant I could make the robot black, which in my eyes is a bit cooler than white.
Here are the chassis and arm parts the day they arrived:

I assembled it into a pretendo-bot, with the hardox parts and some aluminium U-section as a fork mount.

The final chassis was put together with nutstrip. I used tee-nuts to mount the rear shoulder bolt axles and the armour mounts, with M4 bolts everywhere.
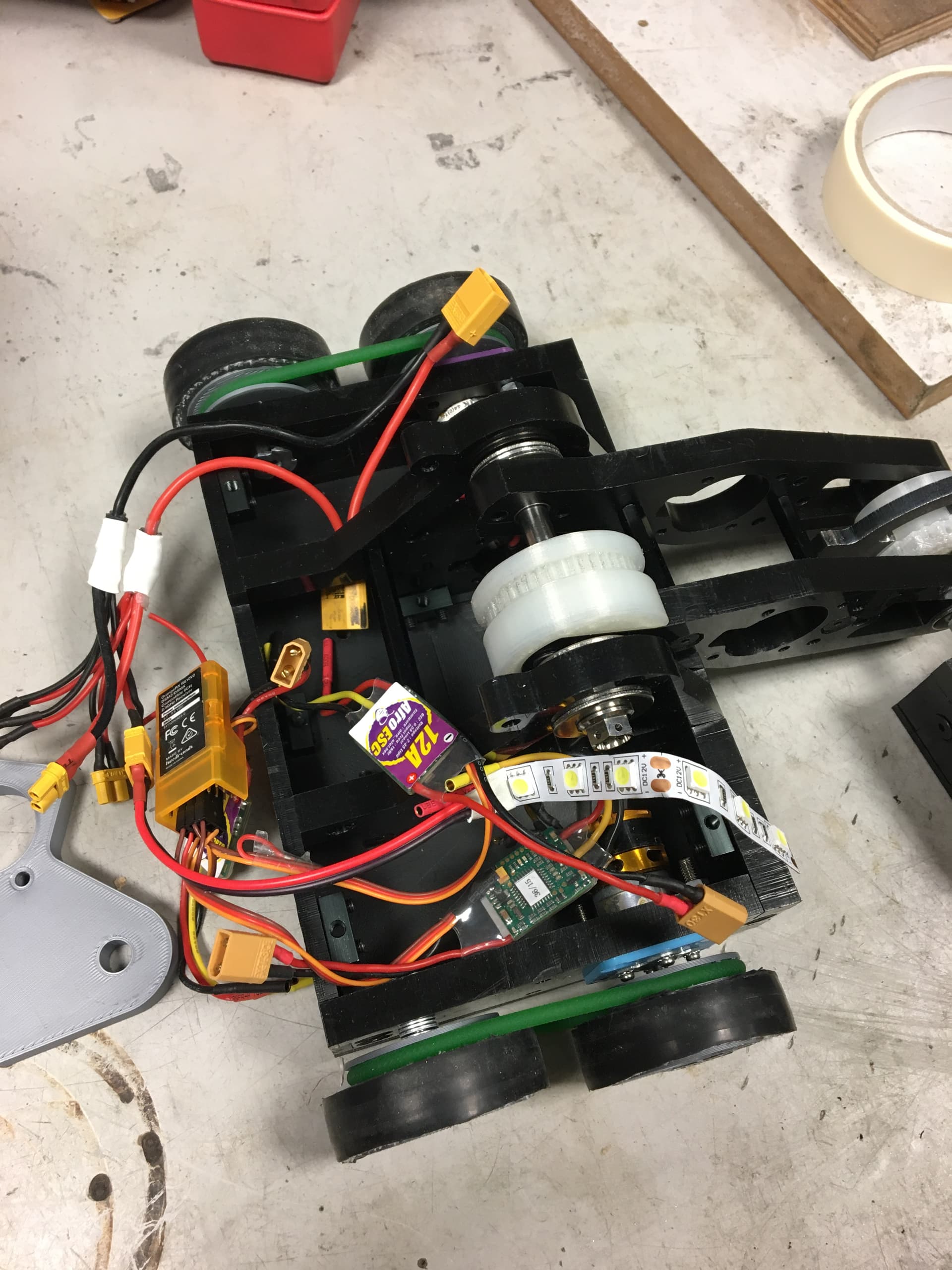
Wiring-wise - I used Afro 12A and 30A ESCs, as I had some lying around, and reused the battery from the first attitude adjuster. This started my tradition of not leaving enough space for the battery in my designs.
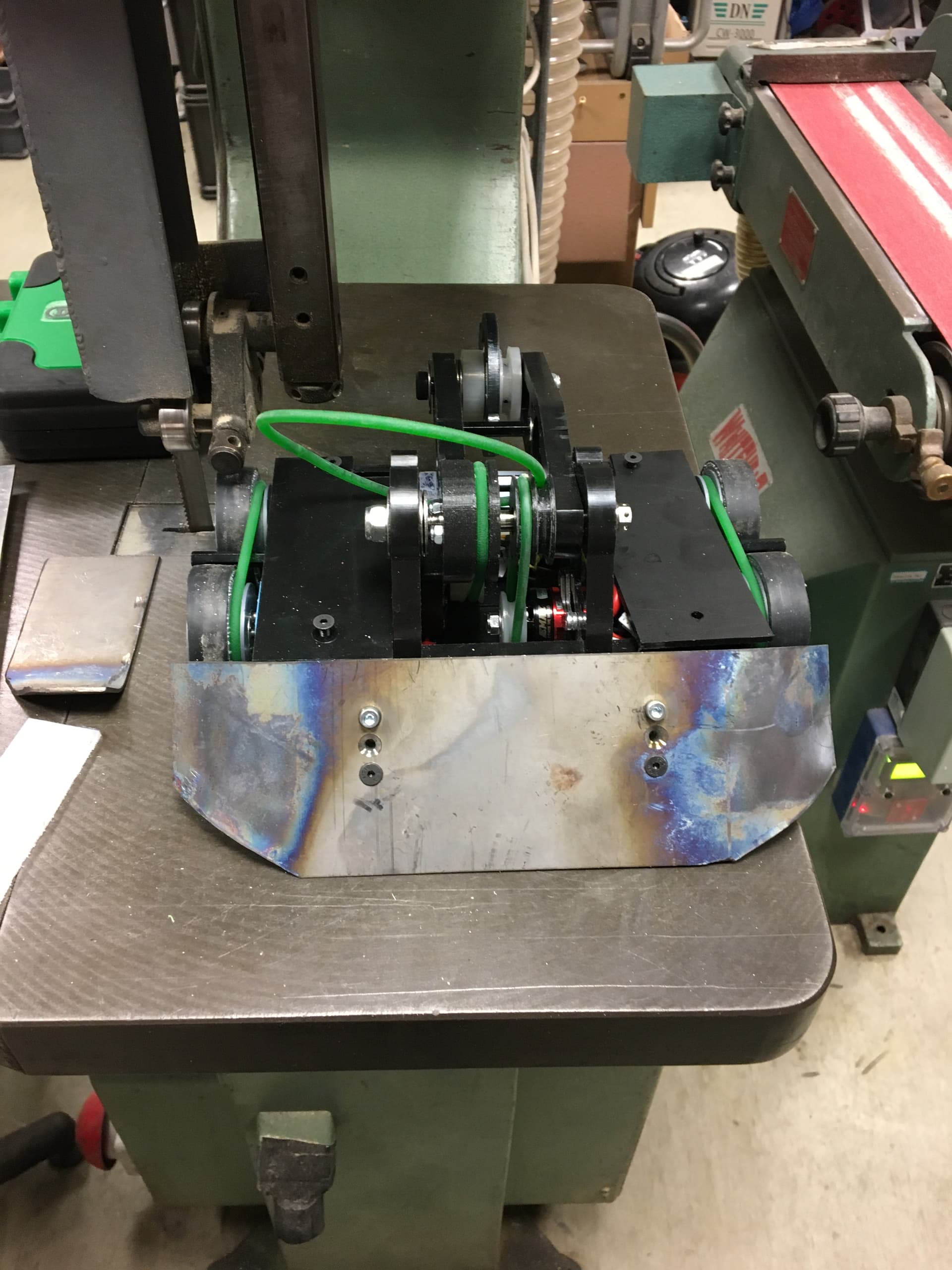
I decided to also make a 2mm titanium wedge for horizontals, with hinged nylon mounts. I still use this wedge for horizontals, it’s pretty sturdy. I cut it with a hacksaw and a Dremel, and bent it myself using a blowtorch and a vice. The bend in particular helps deflect spinners.
For the spinner motor I went for an Emax RS2205S with more belts, which Tweedy used in Toxin. They are powerful, but most importantly small and light.
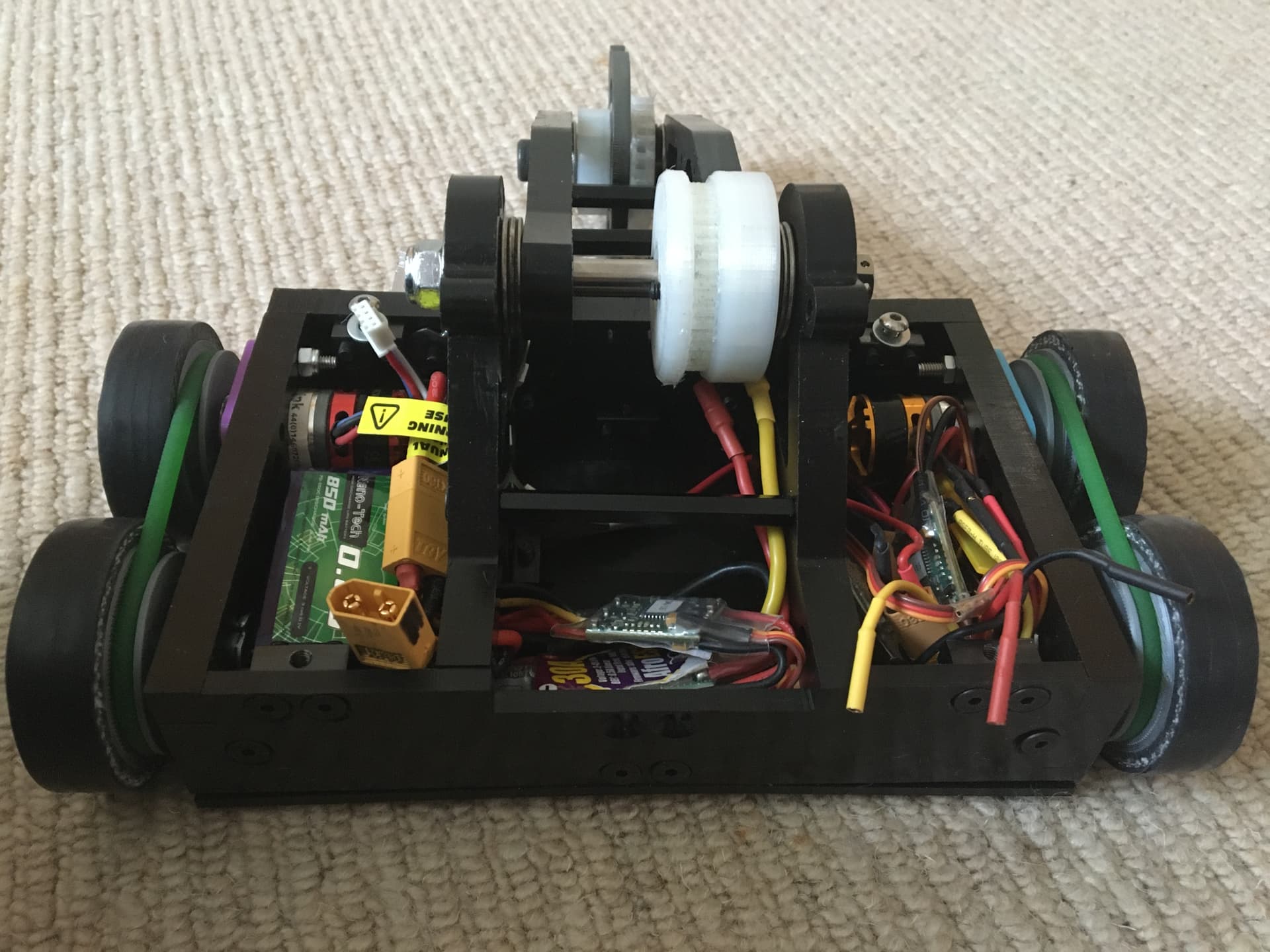
These are the two copies of the bot, ready to go the night before Rapture. There were a few late nights to get to this point. I had a few weight issues with the hammersaw config, so the wheel guards had to drop to 3mm HDPE, and I had to make a last-minute change to use titanium bolts for the arm axle. But we were ready to make the 10-hour drive to Rapture!
