Oliver, here.
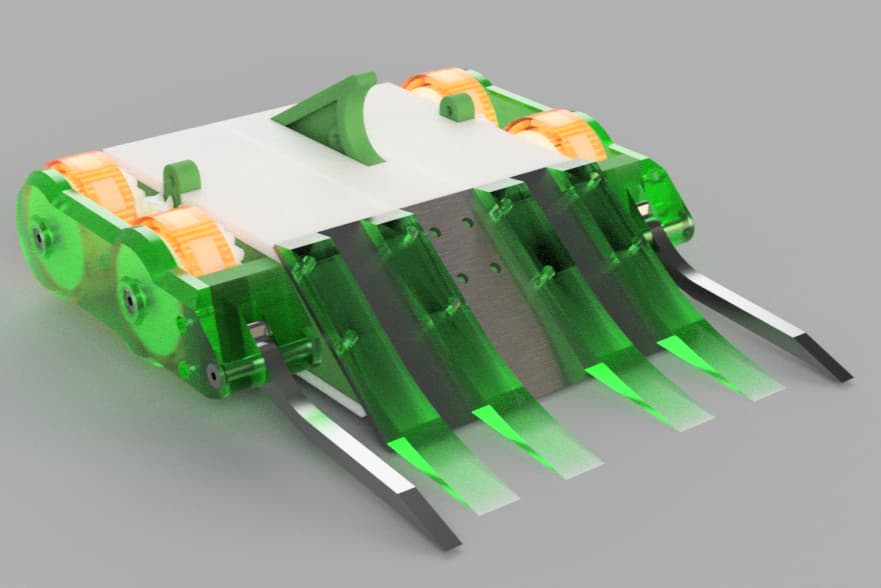
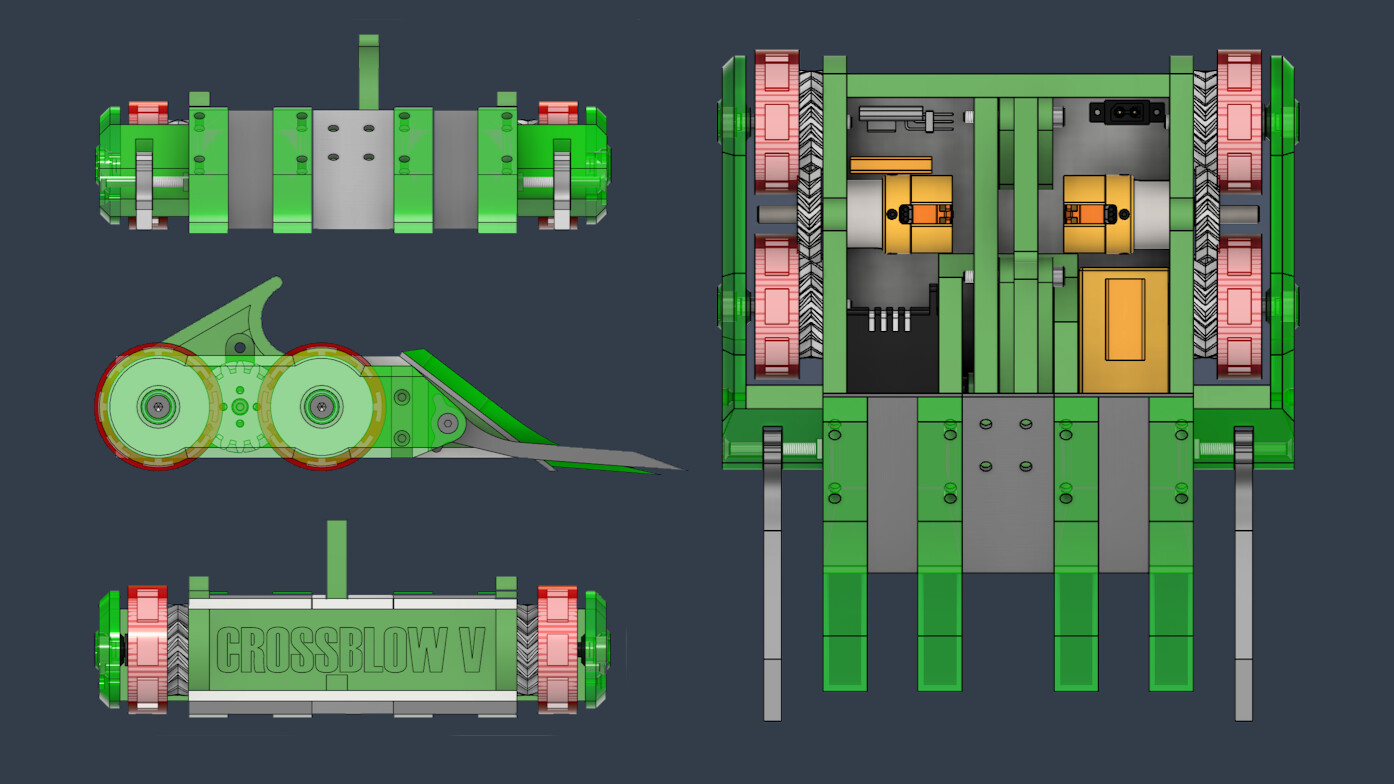
After a little break from robots, Battle in the Burgh has lit that fire in me again. I’m back to doing CAD, making designs, and lurking around the forums again. First on the agenda is CADding up a new-look for Crossblow that has been slowly brewing in my head since Rapture 22. Then I was reading all the fascinating build logs and retrospectives that have already been posted (Shout out to Rob, Yau and Nick), and figured it’d be a nice time to look back as well as forward. Hope you’ll forgive the self indulgence, and enjoy the ride. Here’s the story of the not-quite-only four bar lifter in the UK.
The Journey to Crossblow
My path into robotics was a bit meandering - I was just too young for Robot Wars on its original airing, being a Y2K baby, but I was aware of it through rare, occasional reruns. I got really into it just prior to the reboot announcement, and through the gentle encouragement of both the fan and builder communities, eventually began researching antweights in about 2017 or so.
That culminated in Kosmos, a 2wd front hinge, running 360 servos, and held together entirely by hot glue. The plan was to take advantage of the then-prevalent dropoffs in antweight arenas by selecting a weapon that could flip opponents towards the pits and trenches, rather than flipping them up and away, like a rear hinge. TL:DR it held together just long enough for a few test drives before I discovered how poorly hot glue and polycarb tend to bond.
Kosmos, my very first robot
This was followed shortly after by another aborted ant, called Tough Justice (I promise this is relevant). The old rw101 forum post is long since corrupted, so no photos I’m afraid. But this was intended to be a four-bar lifter, for the same reasons as Kosmos’ front hinge, listed above. Back in 2017, however, antweight components were far from the dizzying array of offerings we have now. Your ESC choices were a Rory Mangles built NanoTwo, available in limited quantities, every so often, or a cheap, chinese DasMikro. Since I was determined to ditch the servo drive, in favour of a ‘proper’ drive system, and that the NanoTwo was incompatible with my cheap HobbyKing transmitter, I patiently waited for my DasMikro to ship from the far east. Months passed.
At the time, I was a pretty novice solder-er, coasting off of my lessons in high school tech lessons. And my less-than-feather-light touch was enough to immediately delaminate the pads on the DasMikro as soon as I got it. At that point, I gave up. Maybe robots were just too fiddly, and too difficult for me to build. TIme passed.
Then Bugglebots happened. My eyes were opened to the then-nacent beetlweight scene. This was exactly what I needed! Bigger robots! Not too much more expensive, either, with an accessible and established pool of parts. ANd there was a web series to apply to! (I had then just moved to Scotland and just missed out on seeing Robot Wars filmed live) Eagerly, I began sketching out new designs, revisiting the Tough Justice concept from the year before. I was very conscious that to make a strong case to the production team, I would have to build something unique. In all my research, I couldn’t find another four bar on the UK beetle scene at the time, and quickly settled on the already-familiar weapon type to design my robot around (foreshadowing).
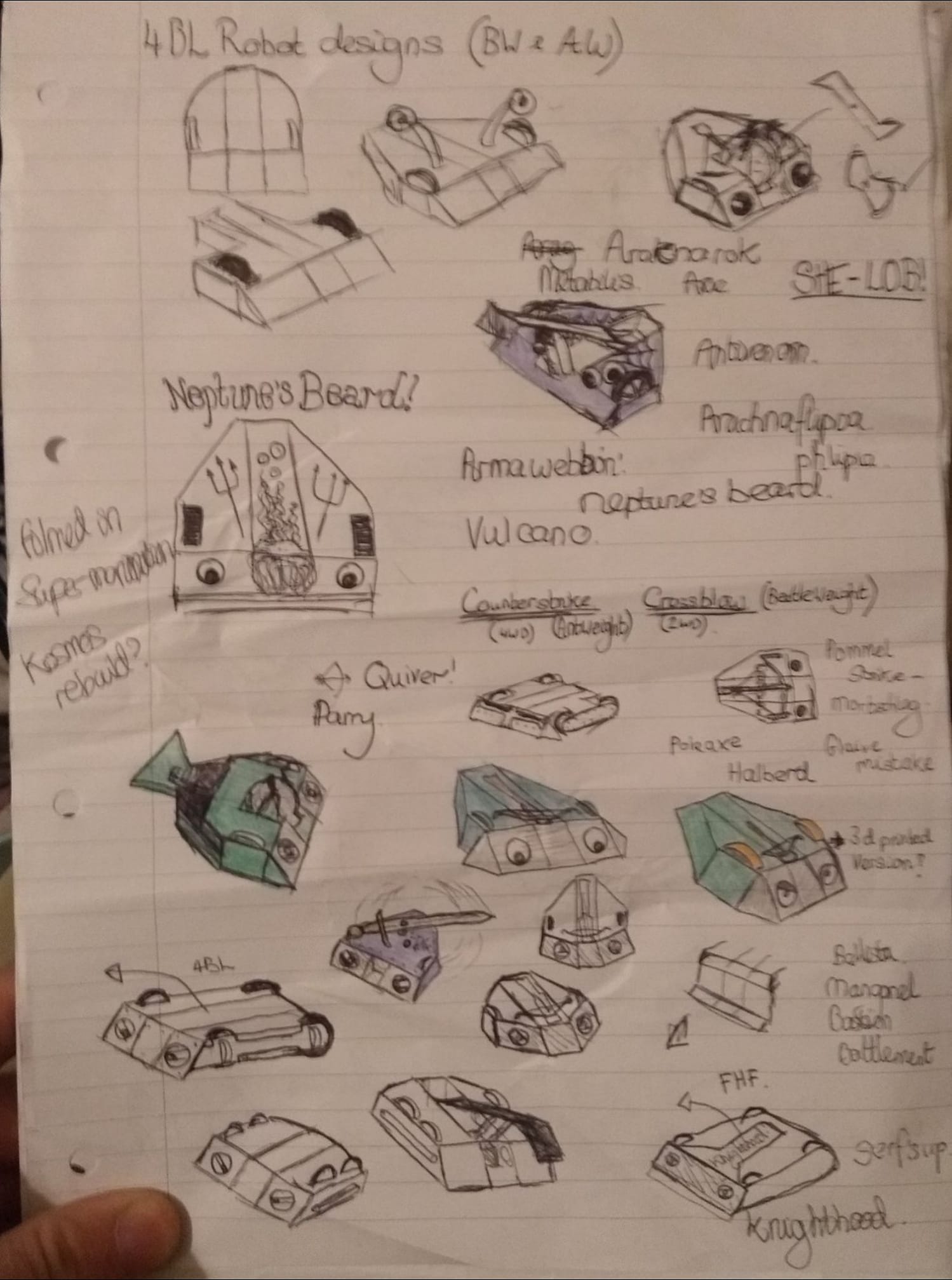
The paper that birthed a beetle. Note ‘Counter Strike’, the antweight, which was basically a new Tough Justice
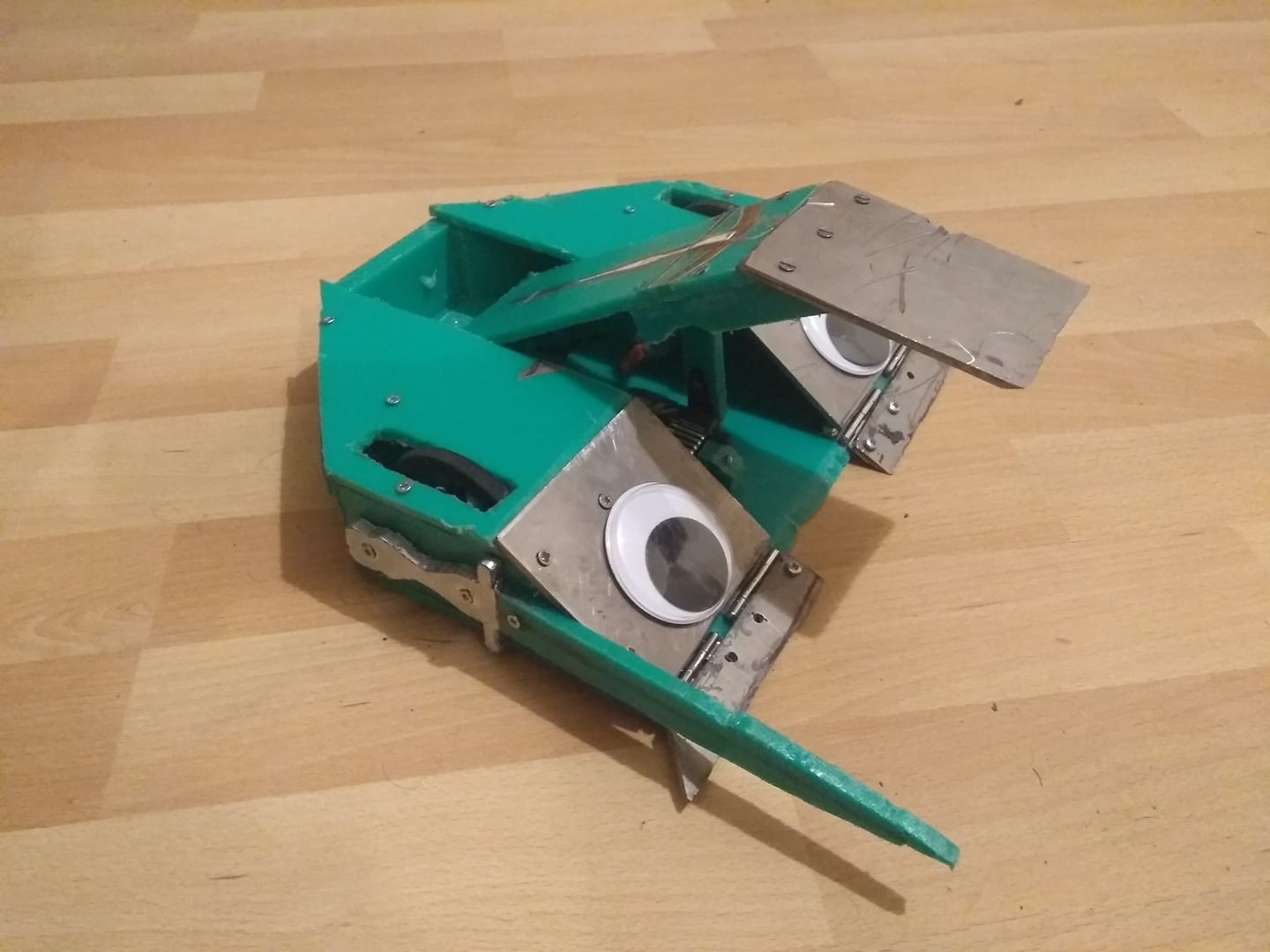
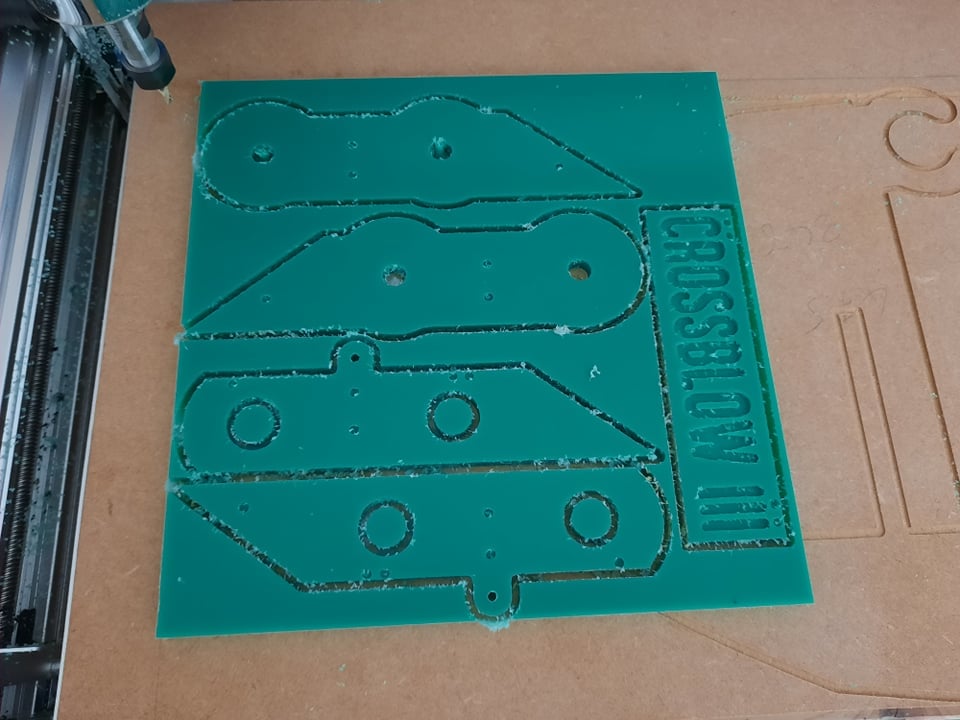
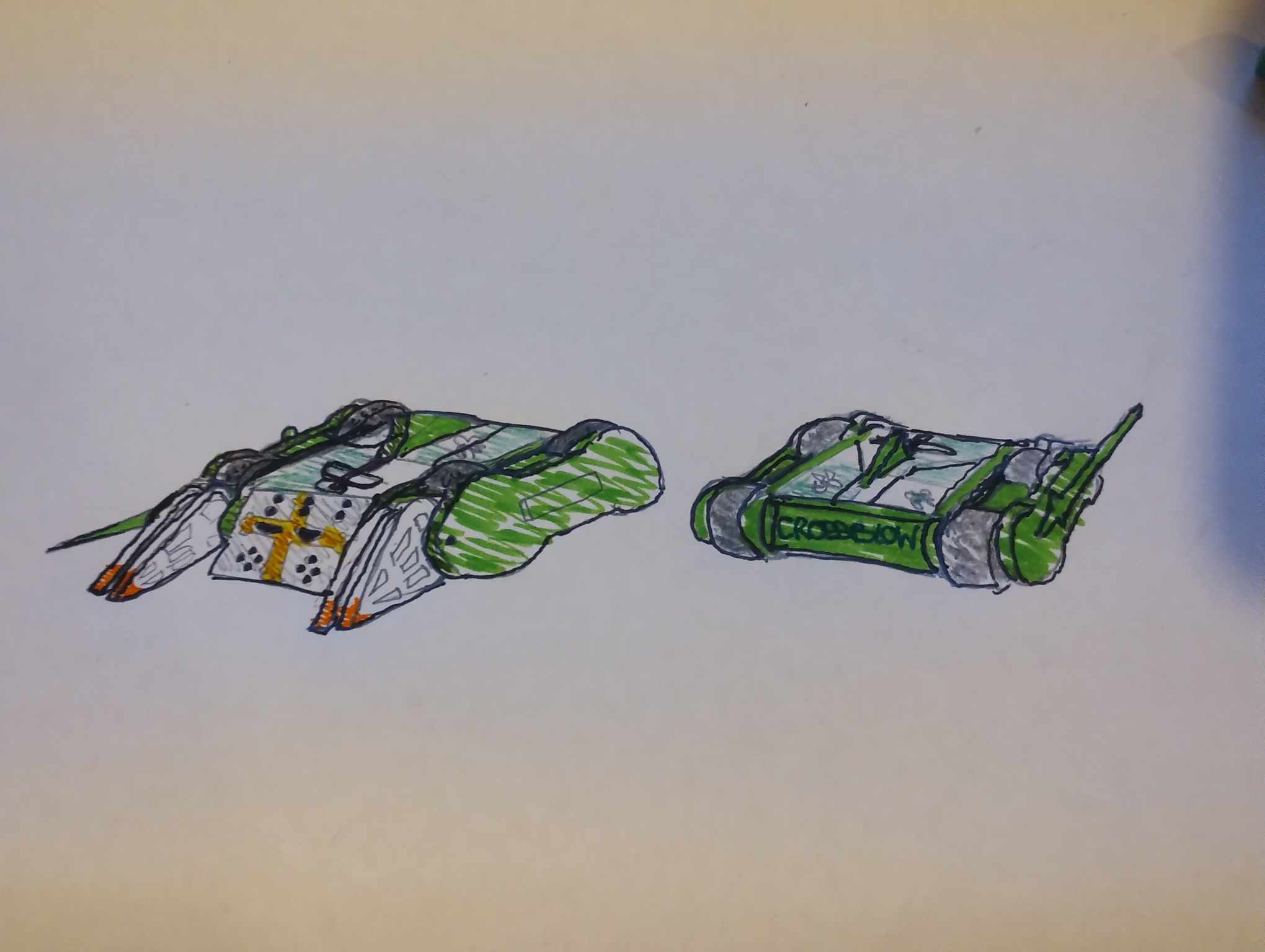
Like many of us, I owned the Hexbug Witch Doctor, and had noticed just how responsive the front-wheel drive was. So, the four-bar gained a pair of wheels, and a striking, diamond-like silhouette that I was very happy with. The rest followed from there. I’d heard great things about recycled UHMW (RG1000) as a material, and, since it only came in black or green, the green colour palette was an easy choice.
The name and theming came from an early brainstorming session. I was an archaeology student, so turned to history for inspiration. I’d already made a few medieval builds in Robot Arena 2, a game I was quite into at the time. Knighthood, Slamelot, and The Barber Surgeon were already identities created for my RA2 workshop, so I wanted something that fit the theme. I’d also recently started historical fencing classes, so worked my way through different medieval weapons, trying to find a name. ‘Crossbow’ became ‘Crossblow’ in an attempt to try and be clever, echoing the ‘punch’ of a four-bar weapon. A crossbow sticker was found to adorn the weapon. Googley eyes were the ‘in thing’ at the time, and no-one likes a plain wedge.
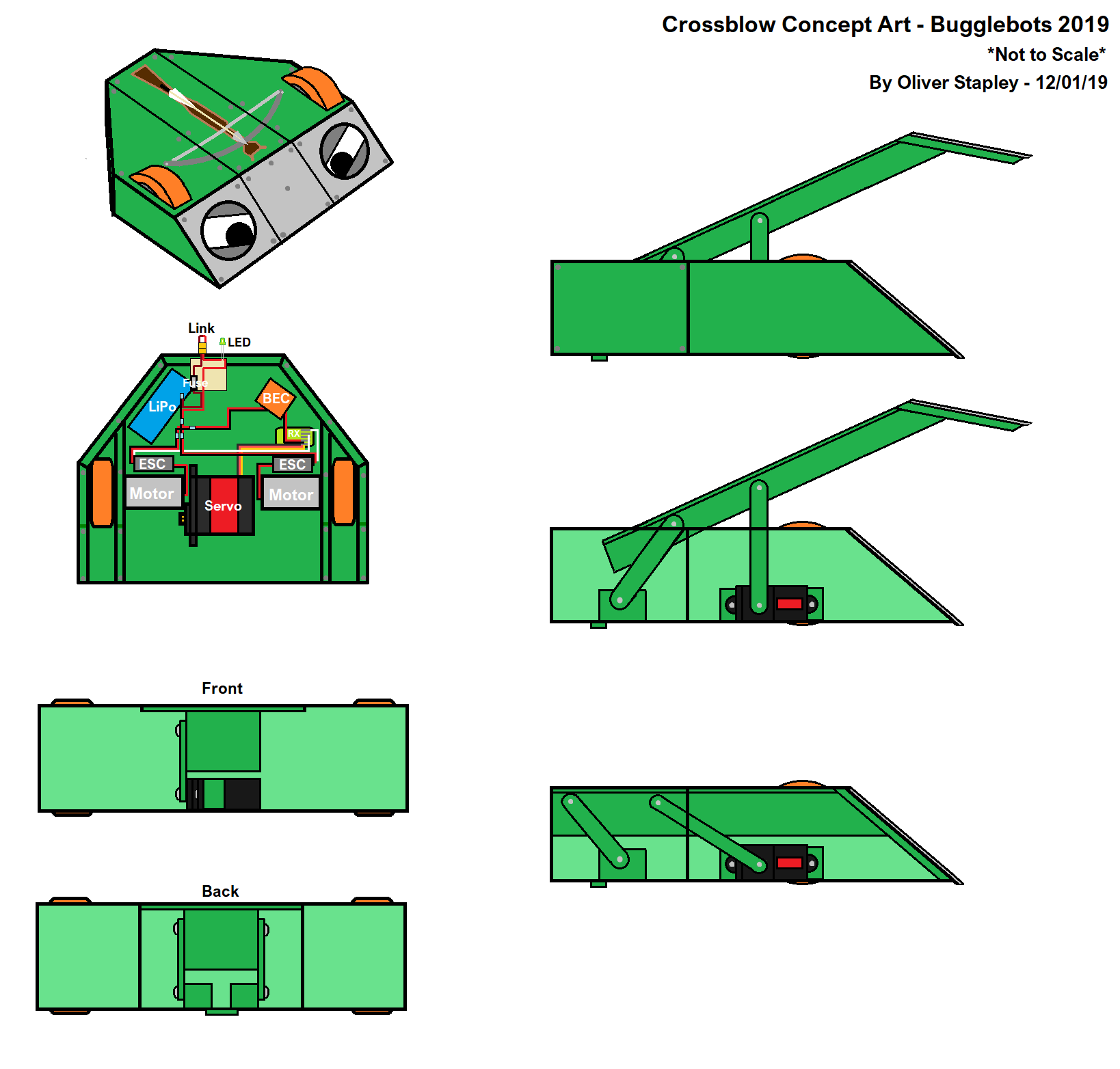
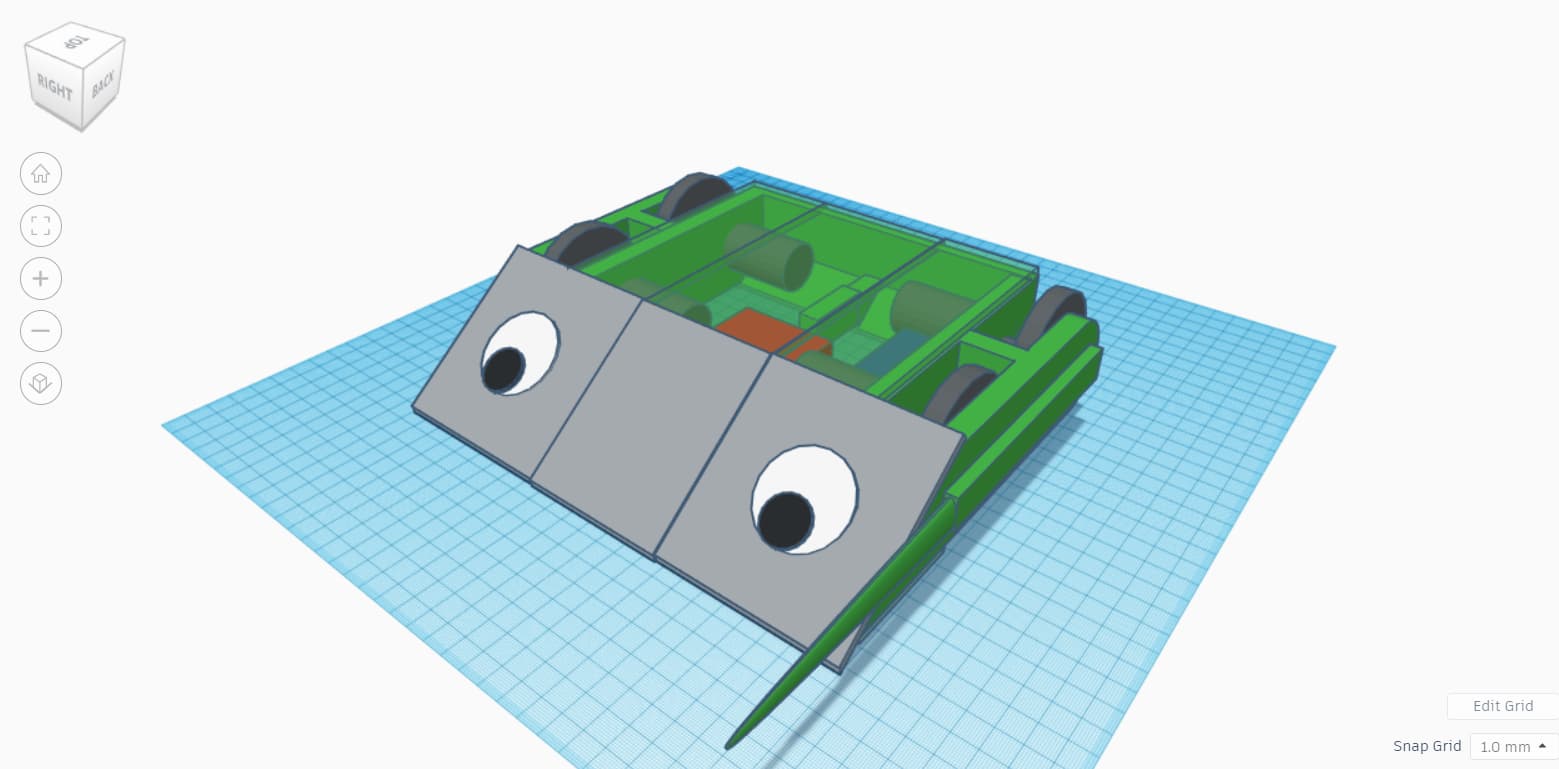
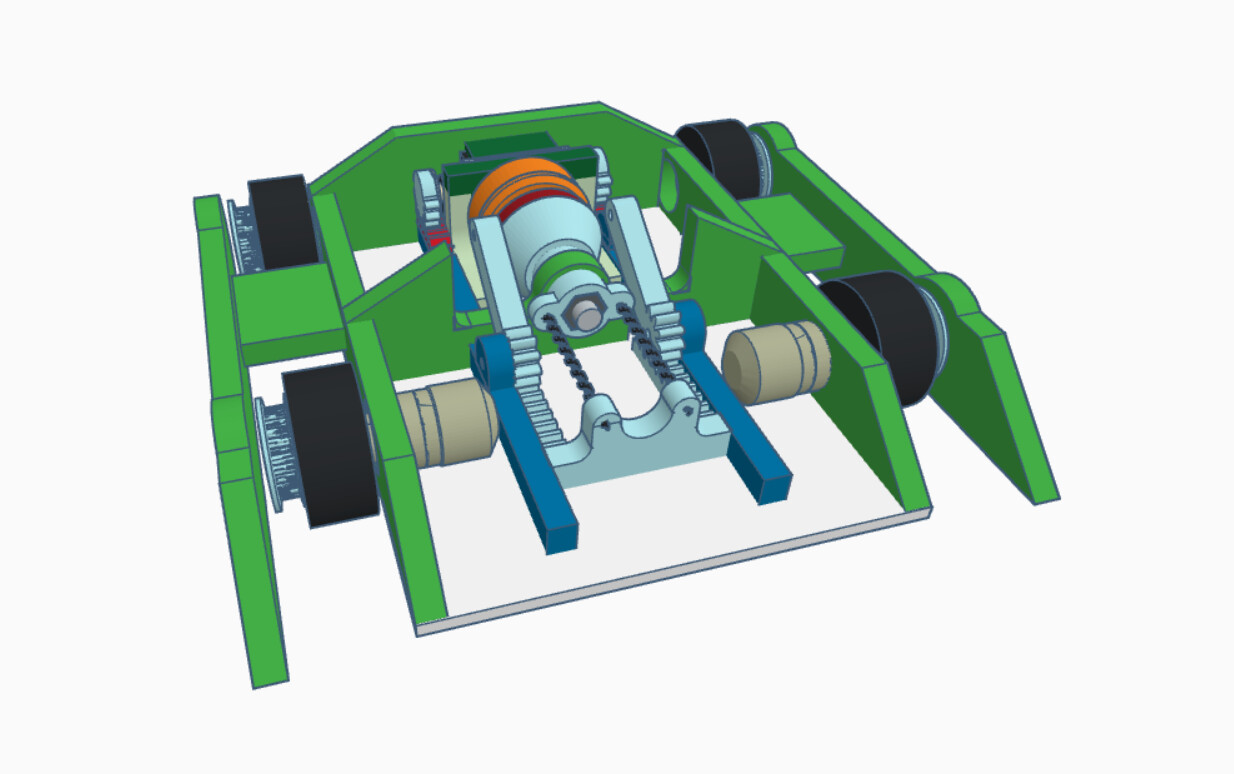
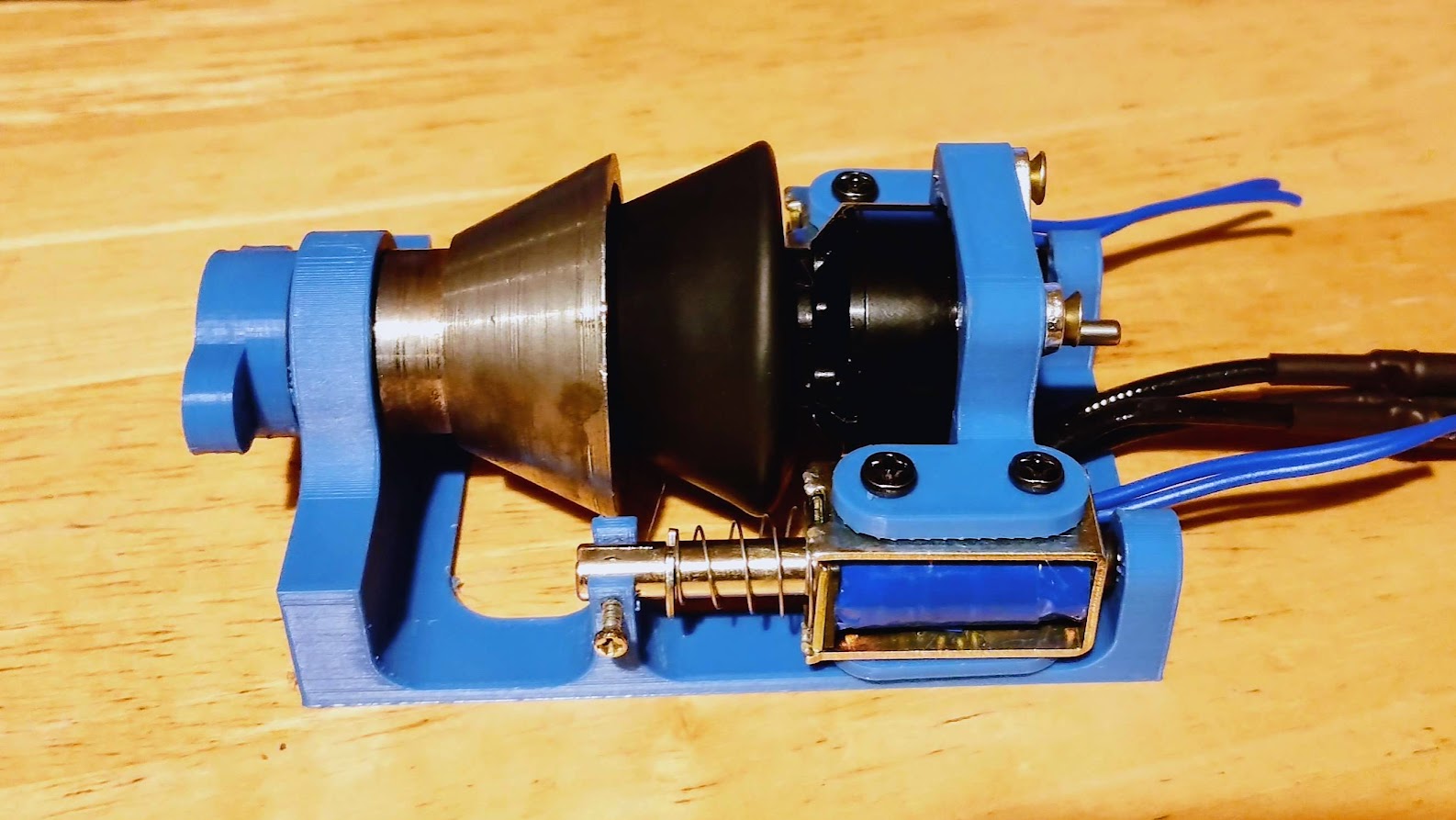
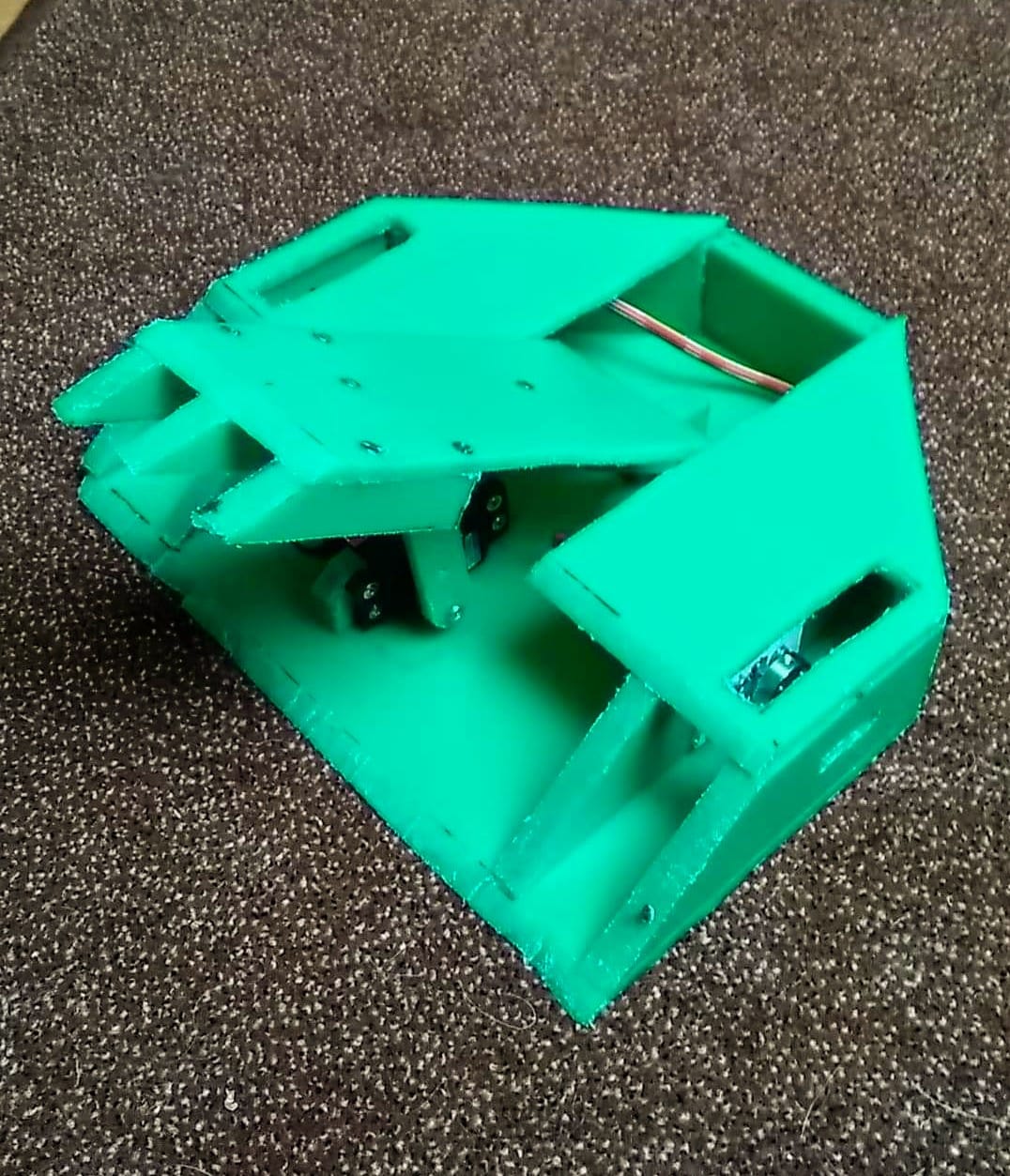
For the visual learners amongst you. This was what helped me visualise everything before the Anatomy of a Frog diagrams. Note the separate car fuse on the board
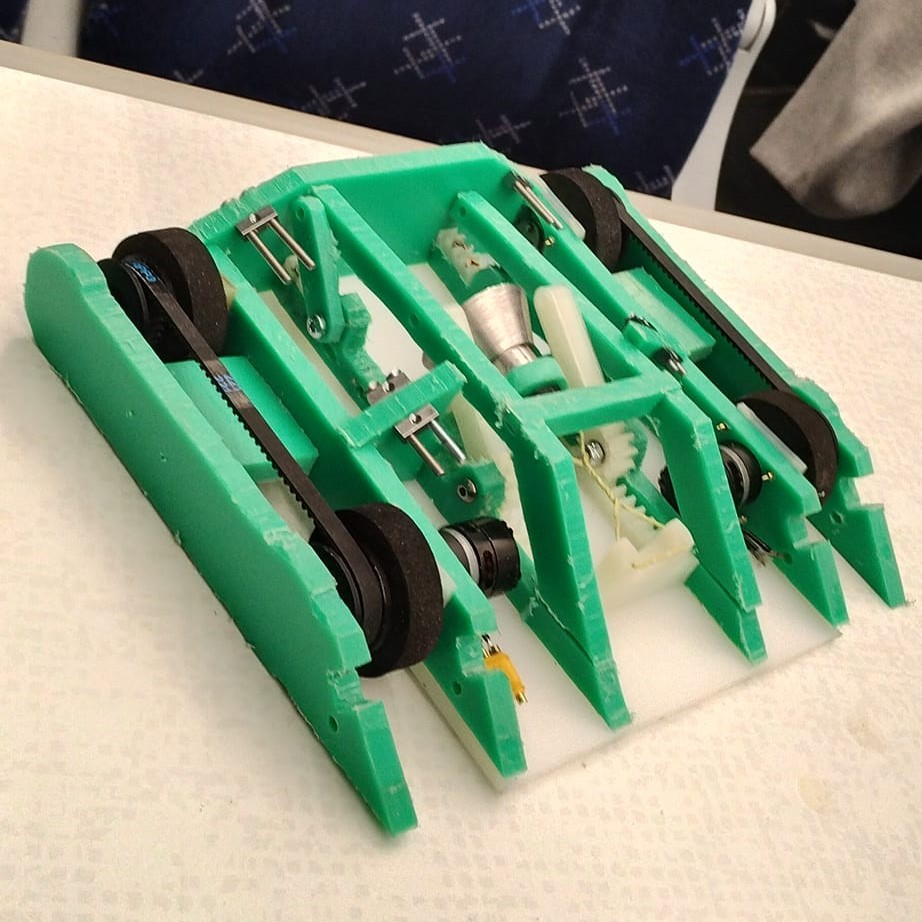
The then-standard components followed - RG1000, in 10mm and 5 mm, 25mm Brushed motors, a 25kg servo, and VEX29 ESCs. Notably, these were old spares, acquired cheaply, that had previously taken K2 to victory in Bugglebots series 1. 3mm Grade 5 titanium looked just about workable with the hand tools I had, and I spent many hours grinding away at a sheet of metal with several junior hacksaw blades. 60mm antweight pololu wheels became my choice, as, while a bit fragile, they would be enclosed and well-protected, and were far more available than the banebots equivalent.
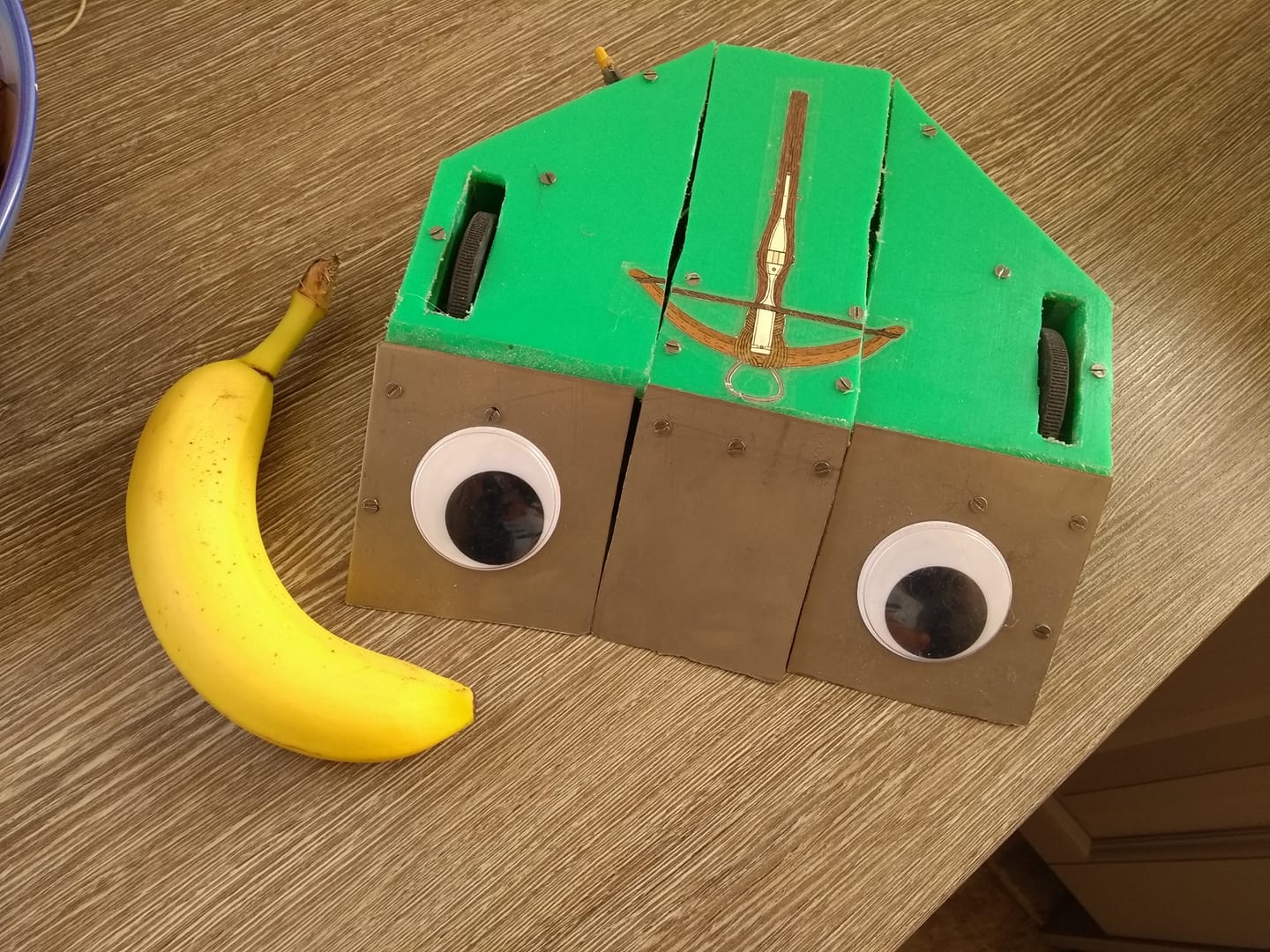
Banana for scale
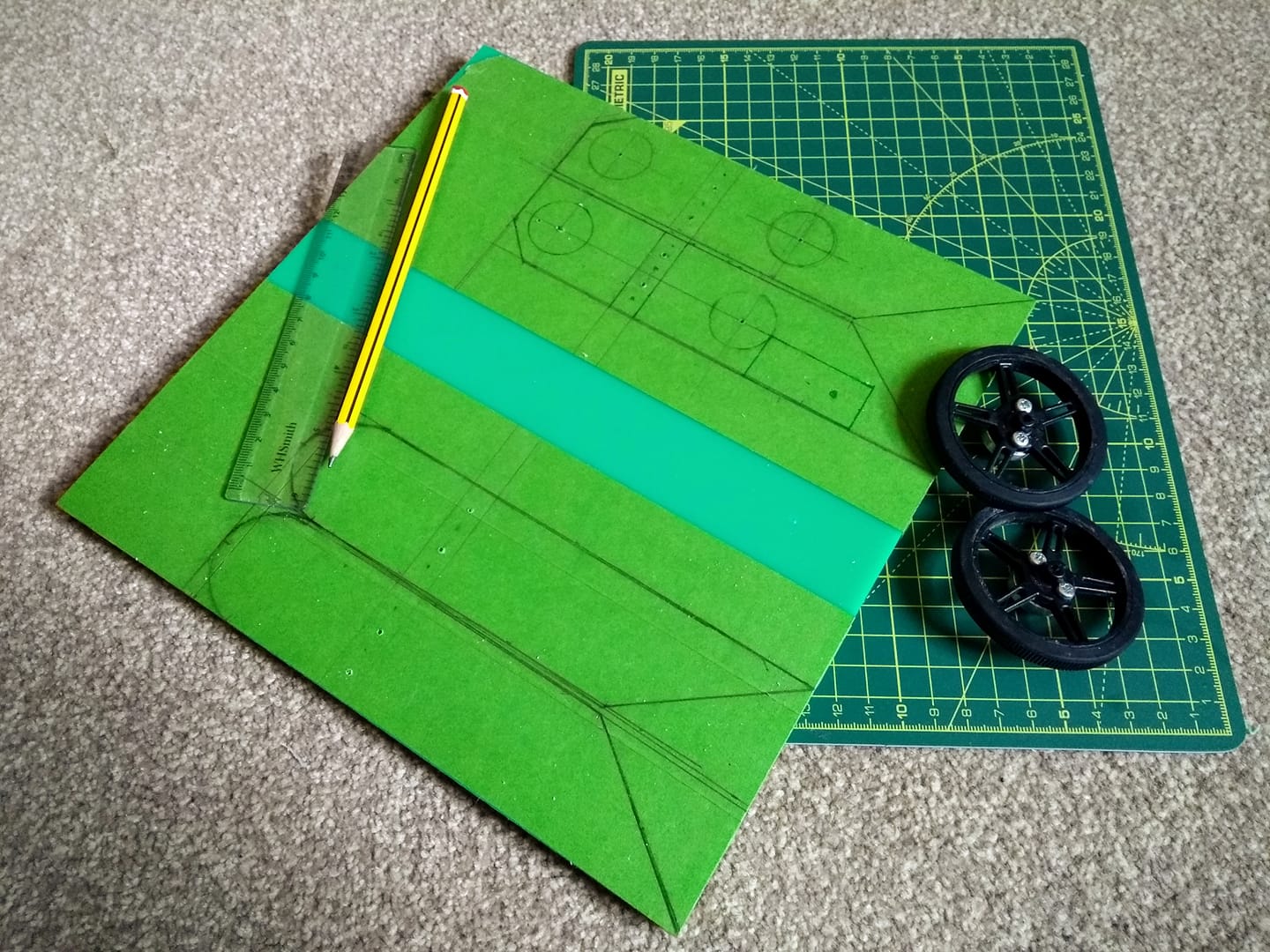
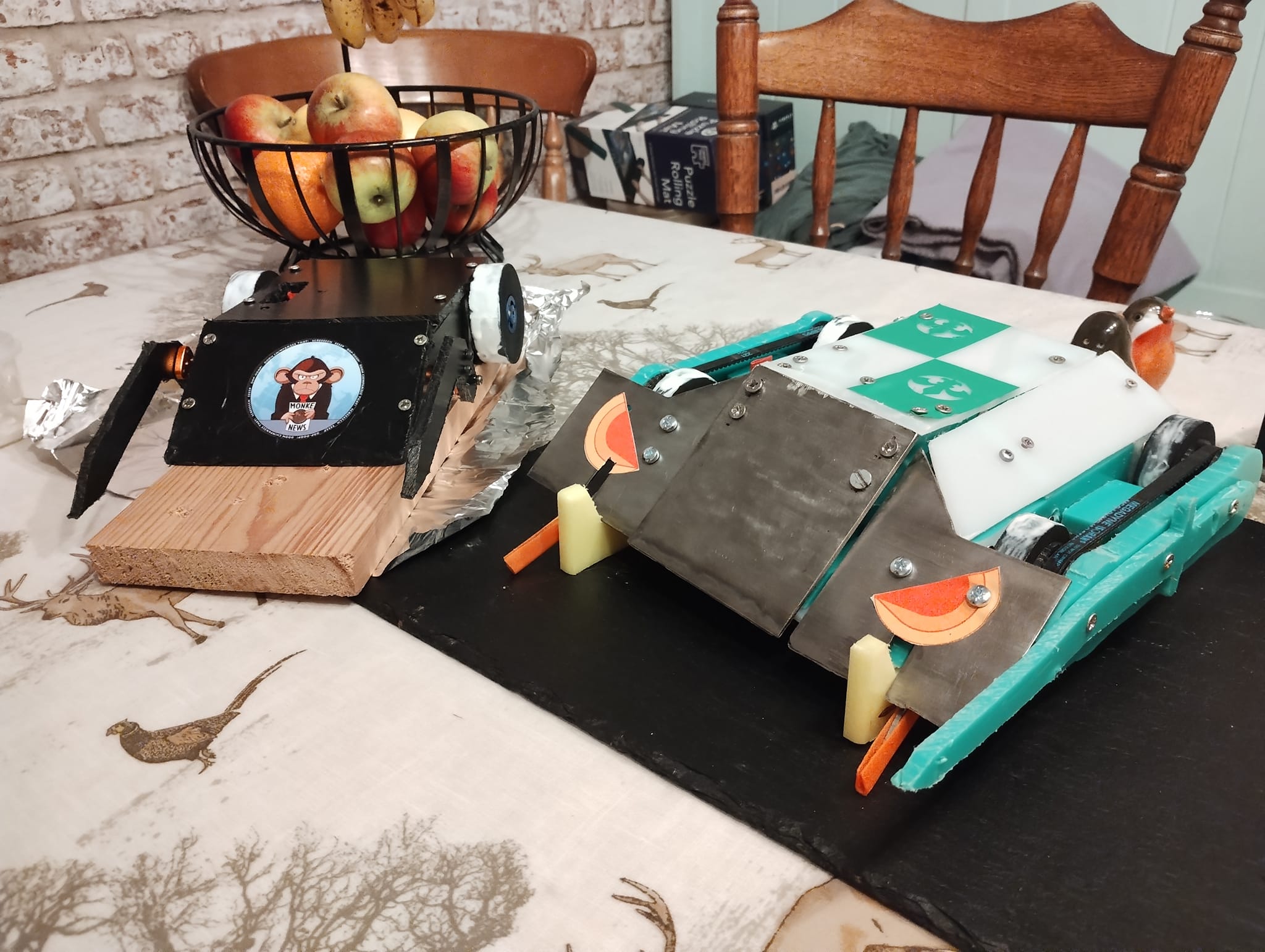
Then came the cardboard mockup, wiring, and cutting my first parts, all by hand. It was during this process that phots began to surface of a new Lance-A-Frog being built for Bugglebots series 2. It had a four-bar. The realisation hit that, by sheer happenstance, I was building a green, medieval-themed, 2wd robot that now would have the same weapon type as an entirely different green, medieval-themed, 2wd robot. Any resemblance to robots living or dead is purely coincidental, and by this point, I was too deep to turn back.
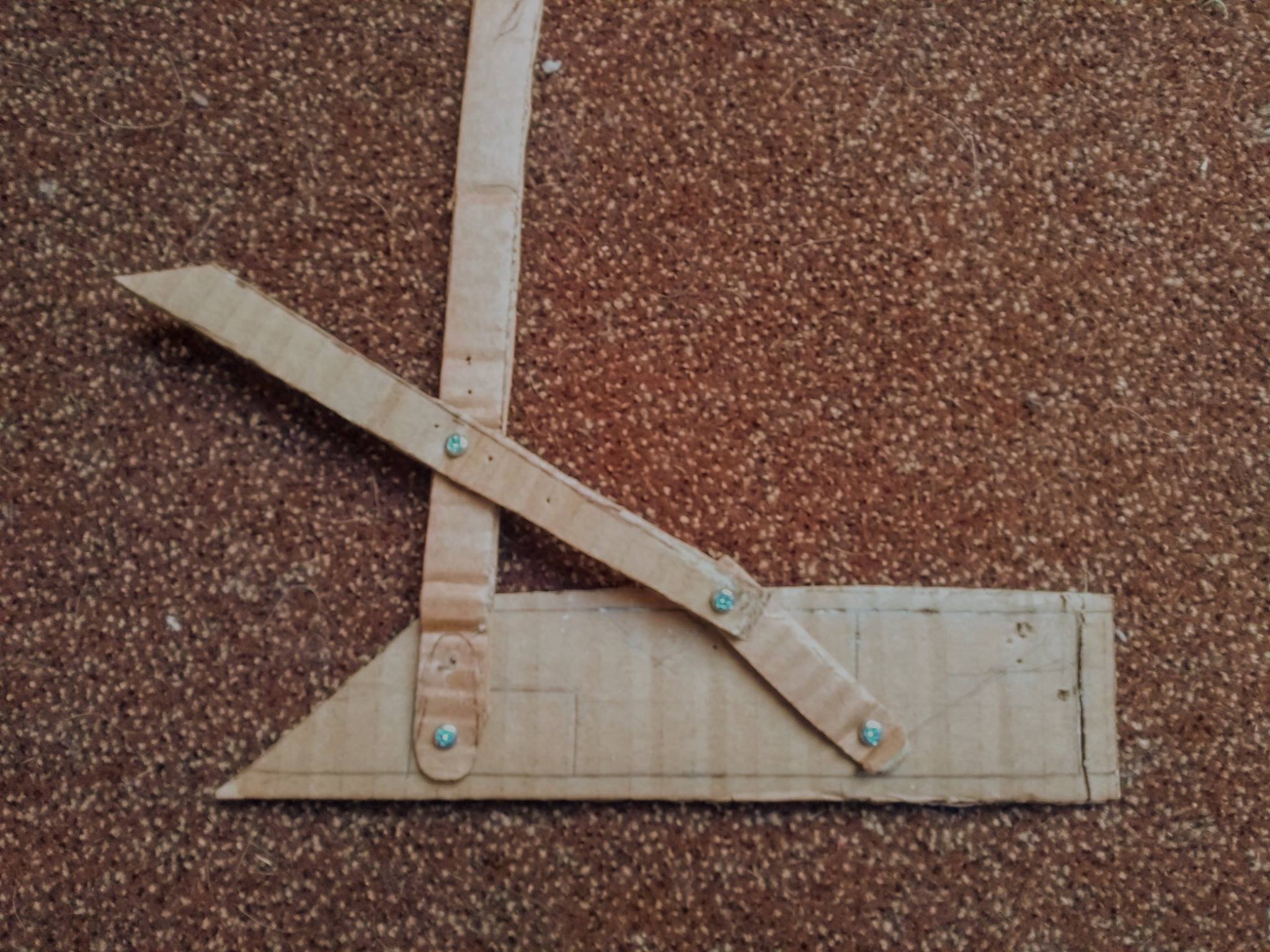
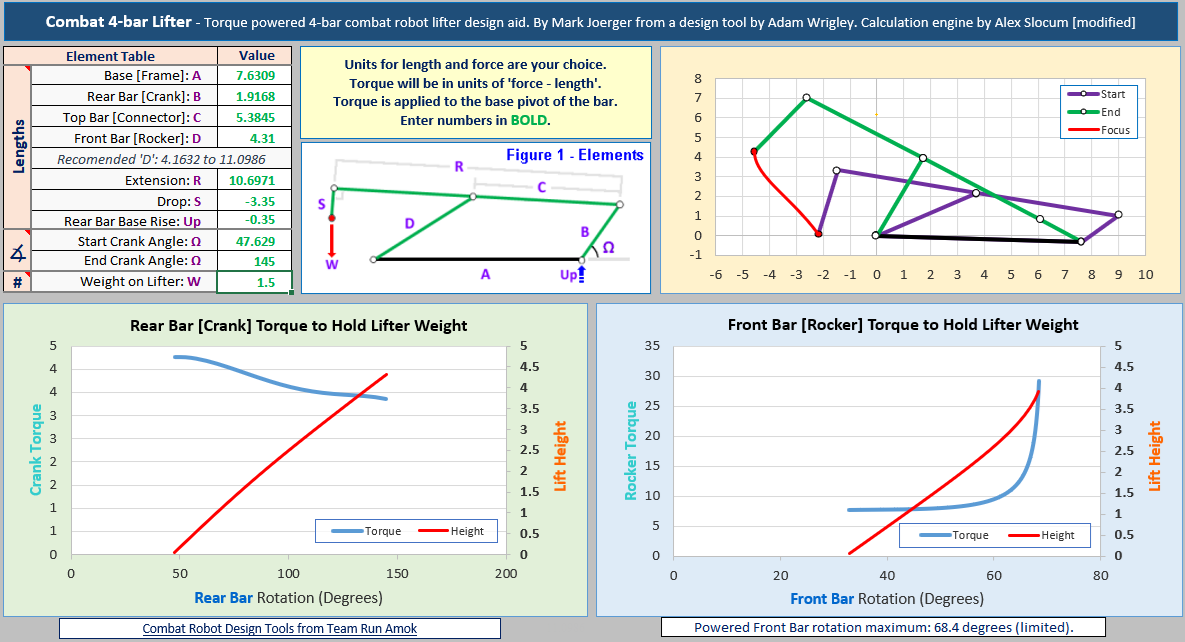
Cardboard Aided Design - Pre-RunAmok Spreadsheet

Not the only green medieval four bar in Bugglebots
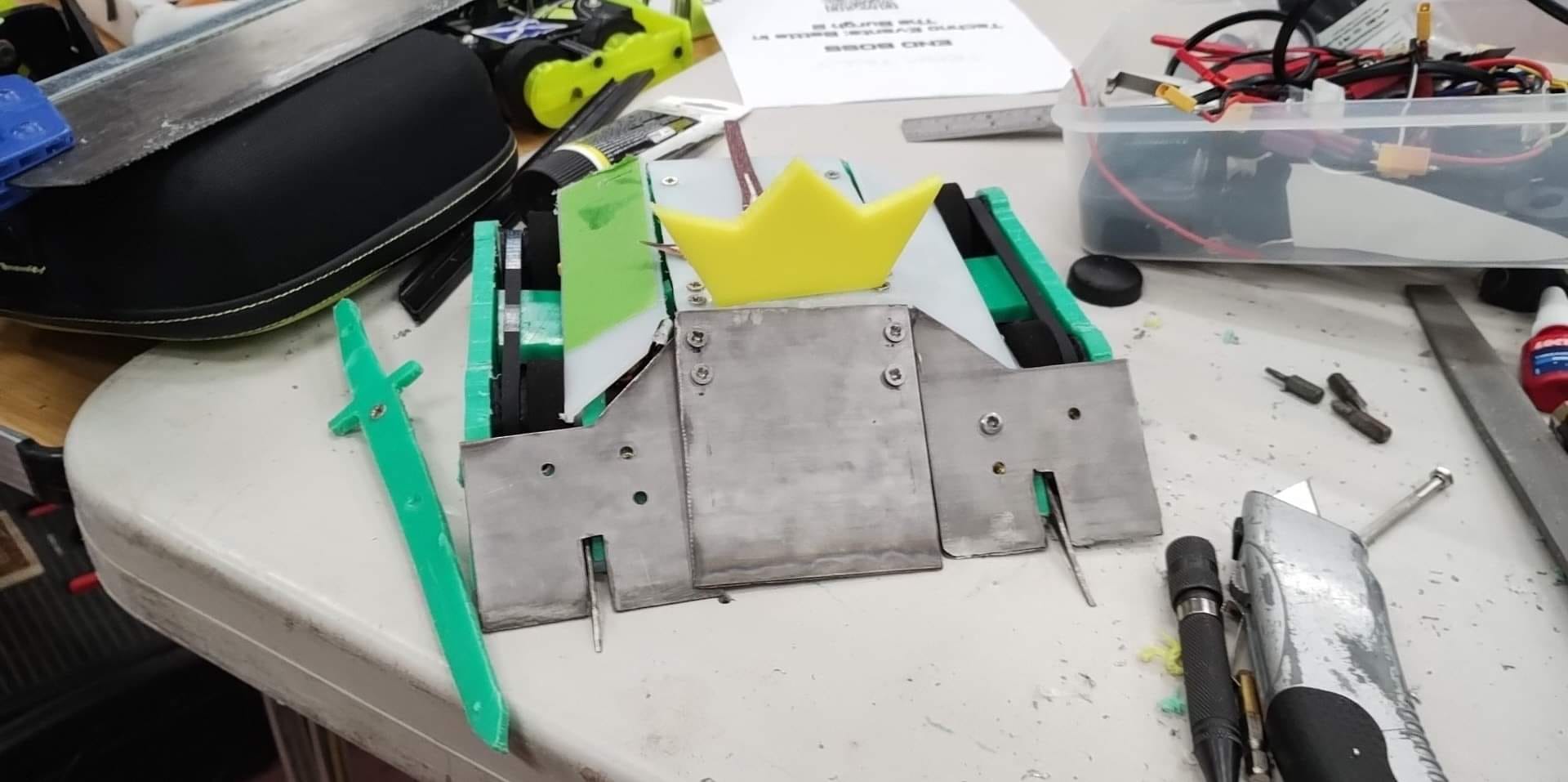
By the time of the application deadline, I had a rolling chassis and half-built weapon, but put things on hold during my university exams. During the break, I discovered that I had not been accepted into Bugglebots series 2. I would later learn that, allegedly, I had been part of an early draft of the roster, but was pushed out by a forgotten Unconscious 514. Which is… fair. Because that thing was a work of art. I was undeterred, however, and made plans to attend filming, and slow down the build process, so as not to rush it for a filming date.
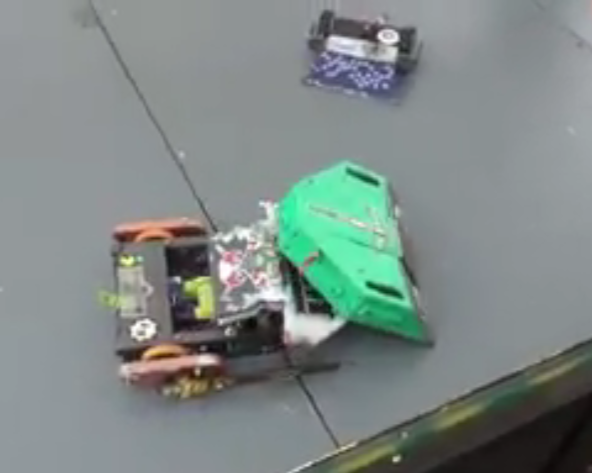
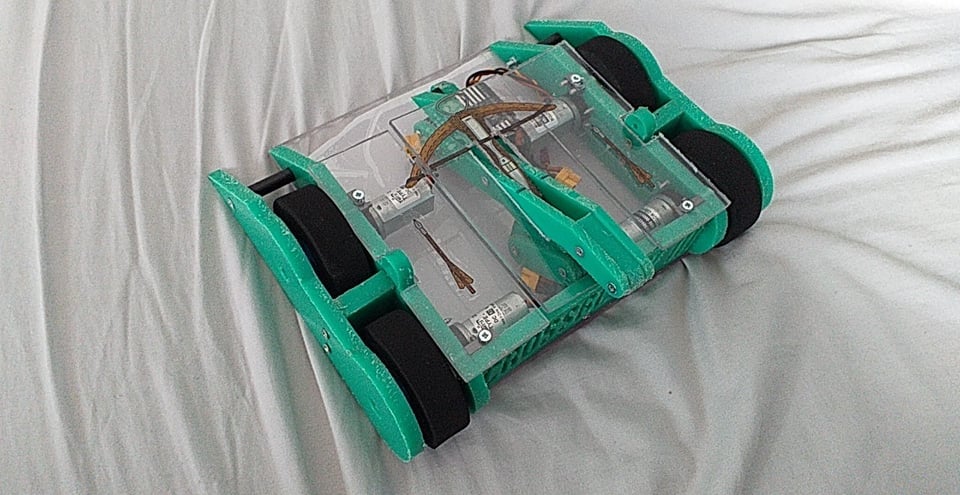
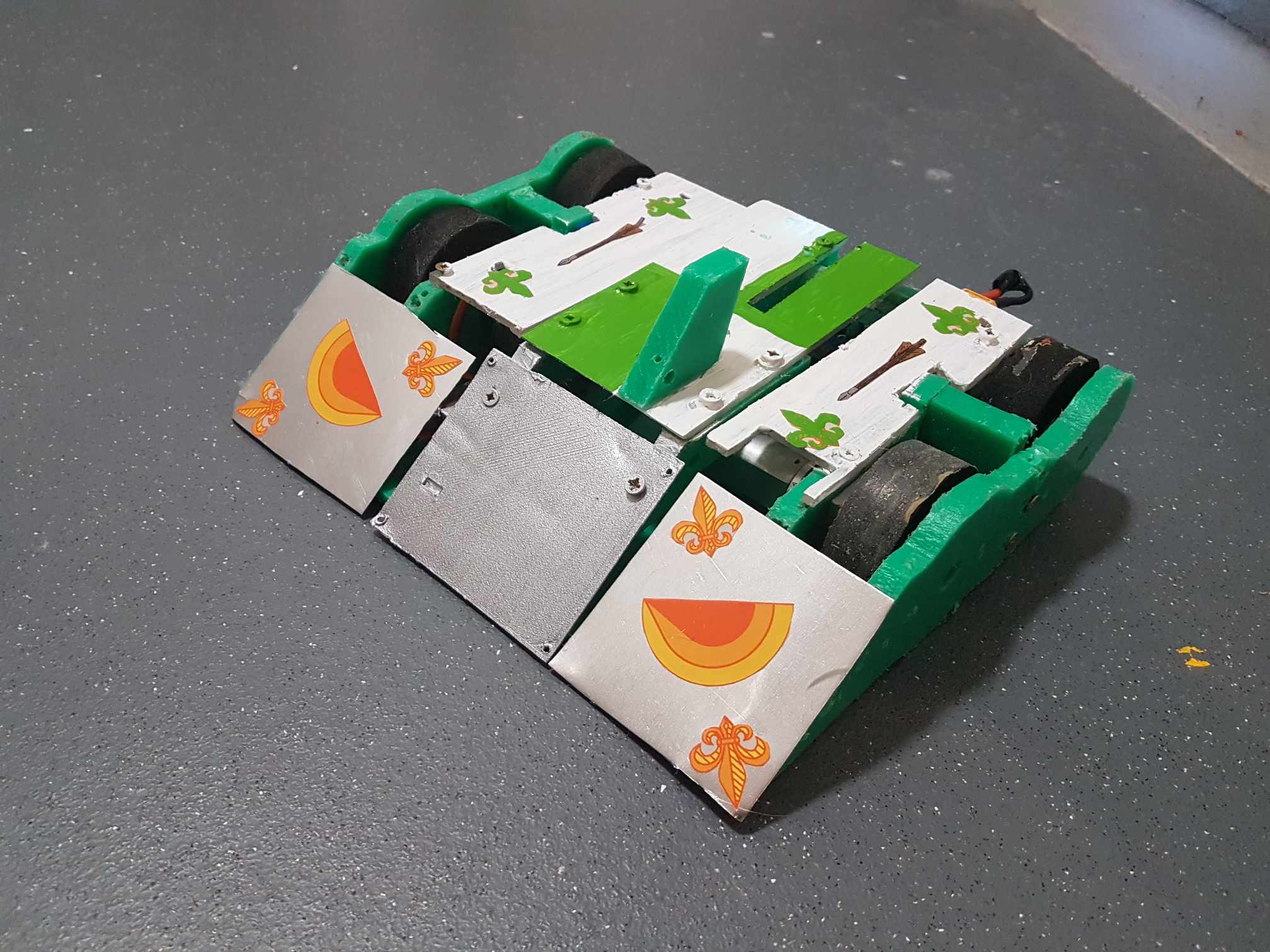
Crossblow at the time of Bugglebots 2019
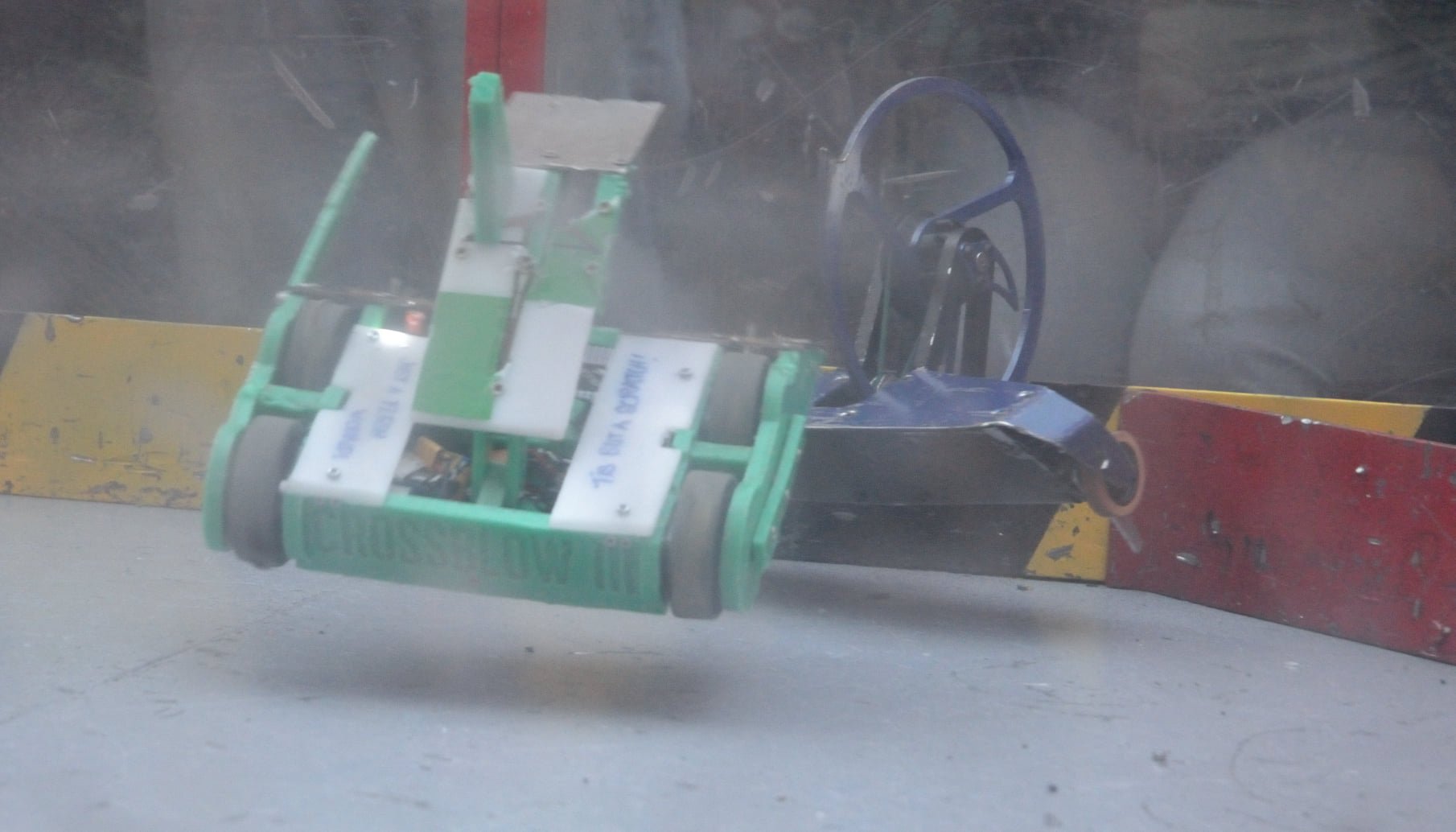
I fully intended to finish it though, and eventually, in the July, I did, complete with wonky edges, and a certain amount of jank. But it was mine. And, at last, it worked. There are definitely things that, looking back, I’d change. Many of them will be covered in later parts, but this thing had a separate car fuse, complete with it’s own holder!

The Drizzle ‘bit’ was purely a joke and I never realised how true it would actually become
The robots are ready etc etc etc
I’ll leave it there for now, but come back for part 2, covering its debut at RoboNerd, Battle in the Burgh 1, and the ill-fated SXS of 2020. Hope you enjoyed this.