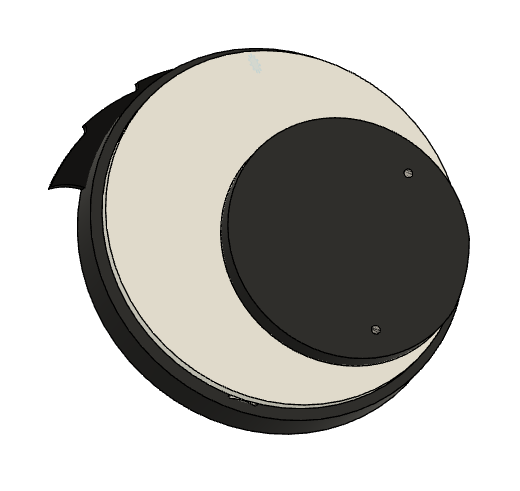
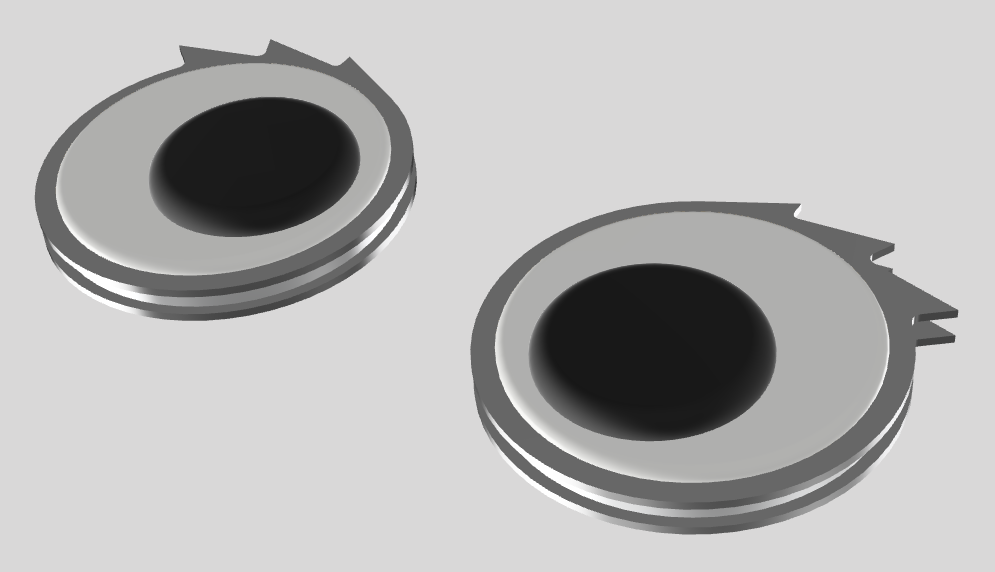
The most important side quest in any robot competition is, of course*, the googly eye game. There are lots of ways to play it, such as sheer number, hilarity of placement and so on, but for the purist, the only game is who has the biggest.
Well, if the googly eyes are the robot, you can only win:
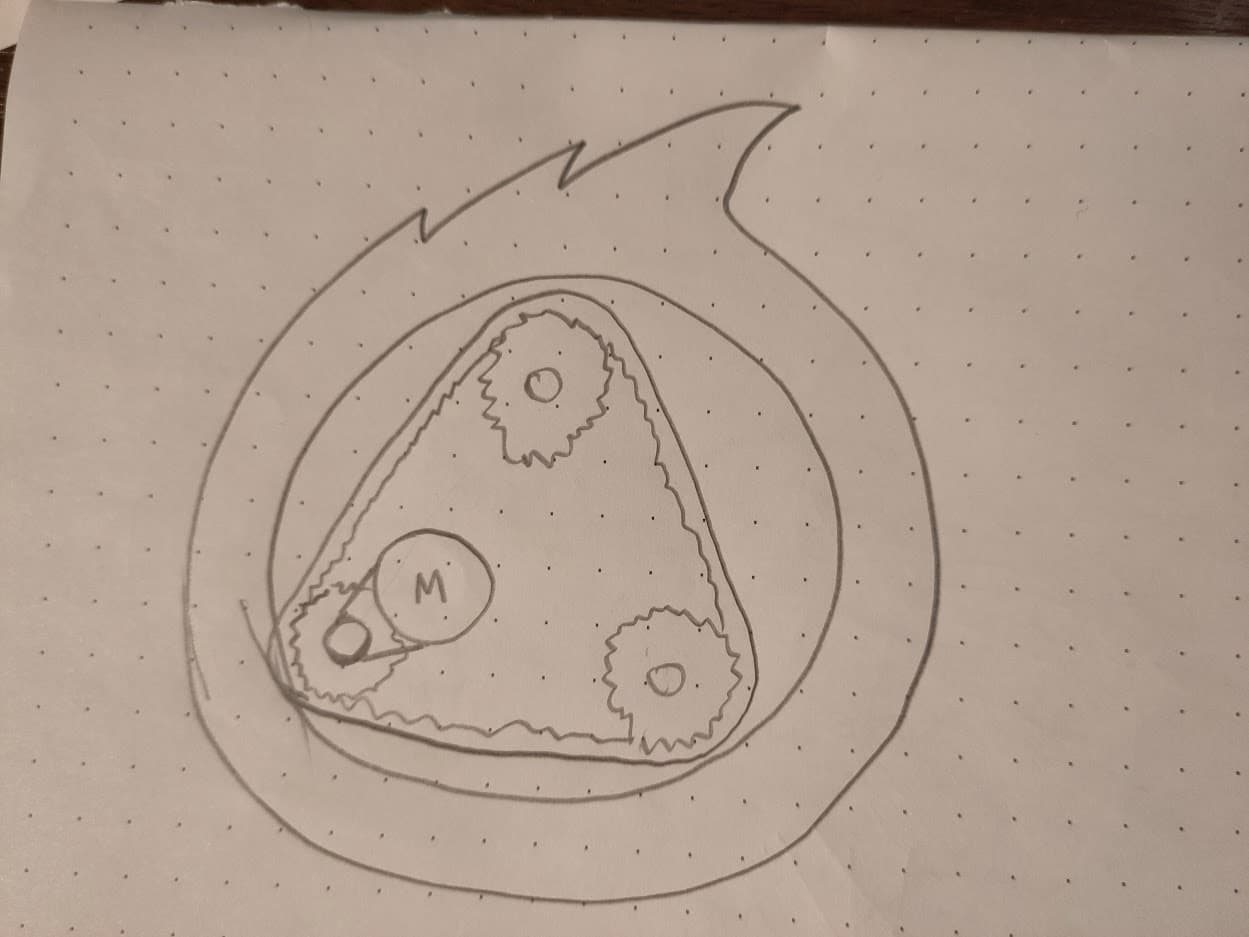
Currently this is just a well-pondered concept but I’m going to be building it in time for Subterranean Showdown, so it’s going to need to get a bit more real fairly imminently.
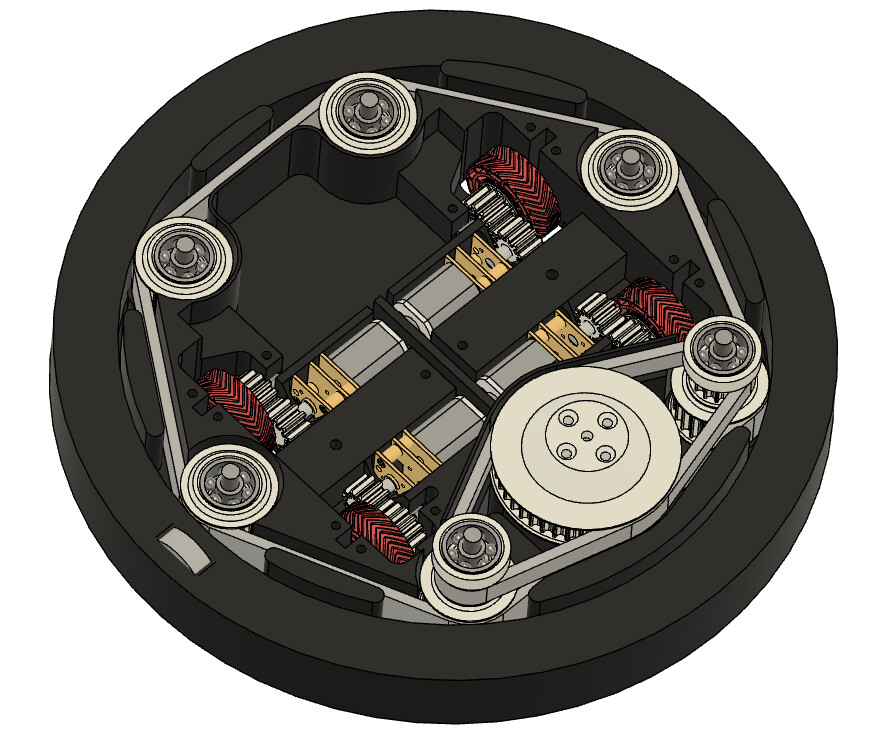
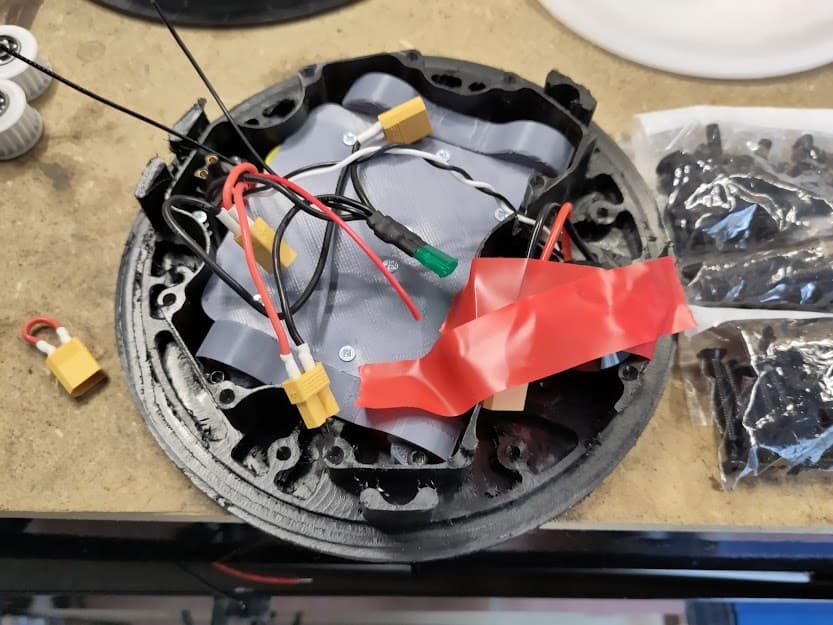
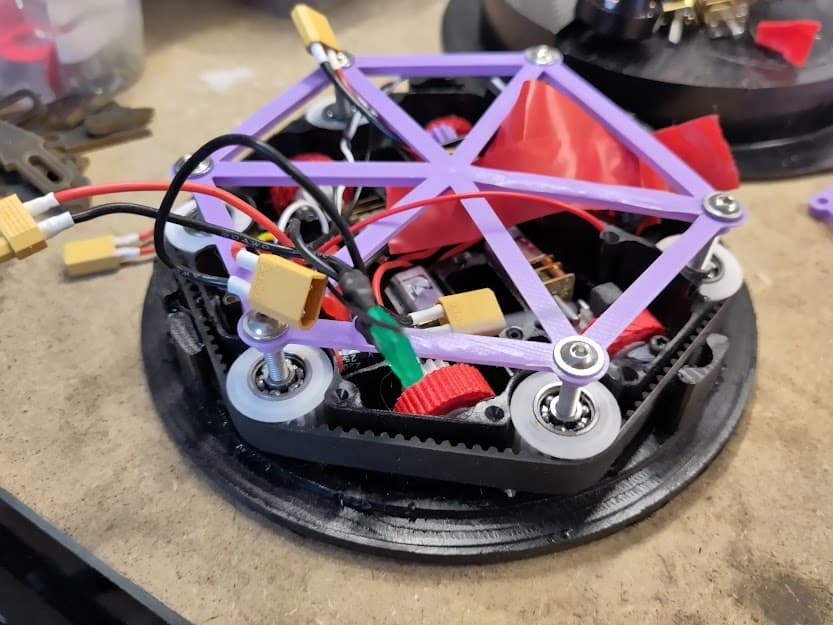
The basic idea is for two identical ring spinners, spinning in opposite directions and thus hopefully avoiding any friendly fire issues (since there should be no relative motion if they’re both spinning). The pupil of each eye is the directional indicator.
My main concerns at the moment are around motors, both drive and weapon. Standard beetle drives could work but it feels like they could be a bit too hefty. On the other hand there’s not much established in the “half a beetleweight” class. A few things I’m mulling over:
- Smaller motor, something like this.
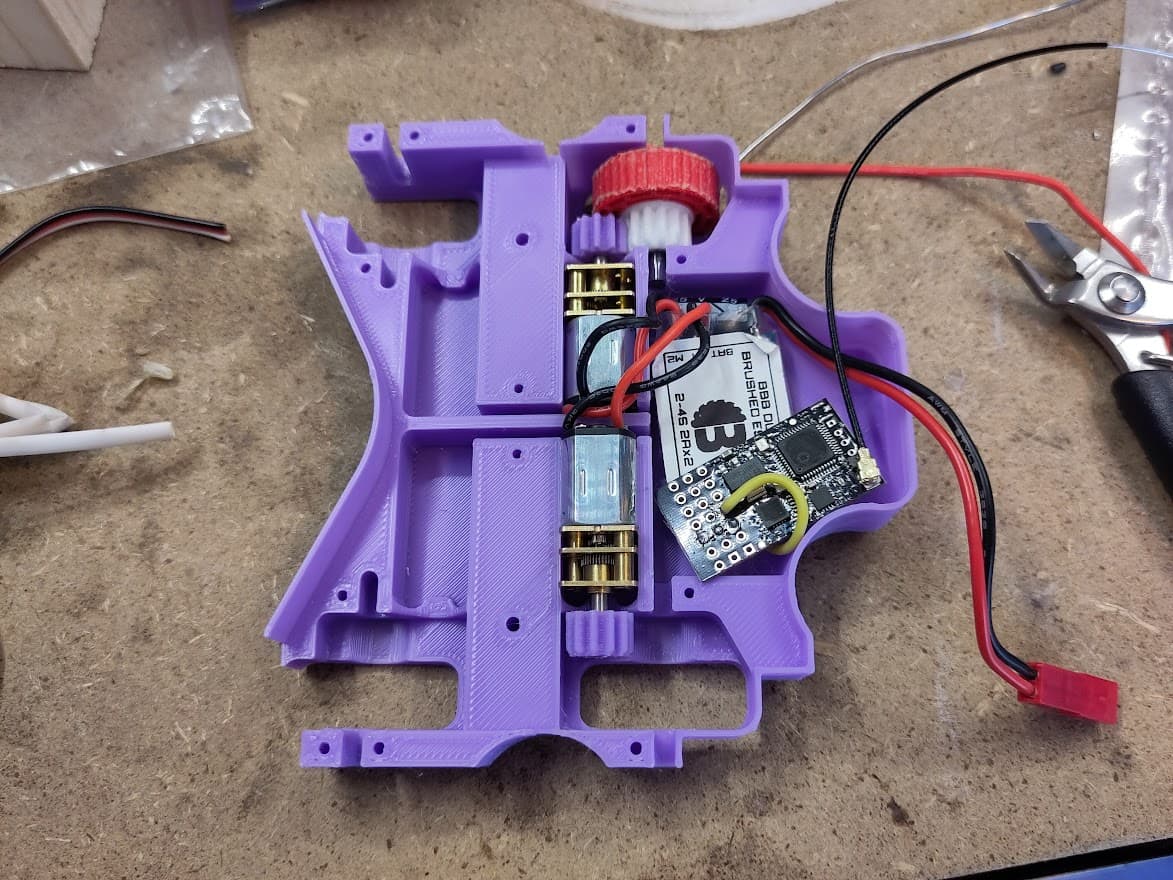
- Standard beetle drive (probably brushed, don’t really want to drop that much cash on brushless for something that is just a bit of a laugh)
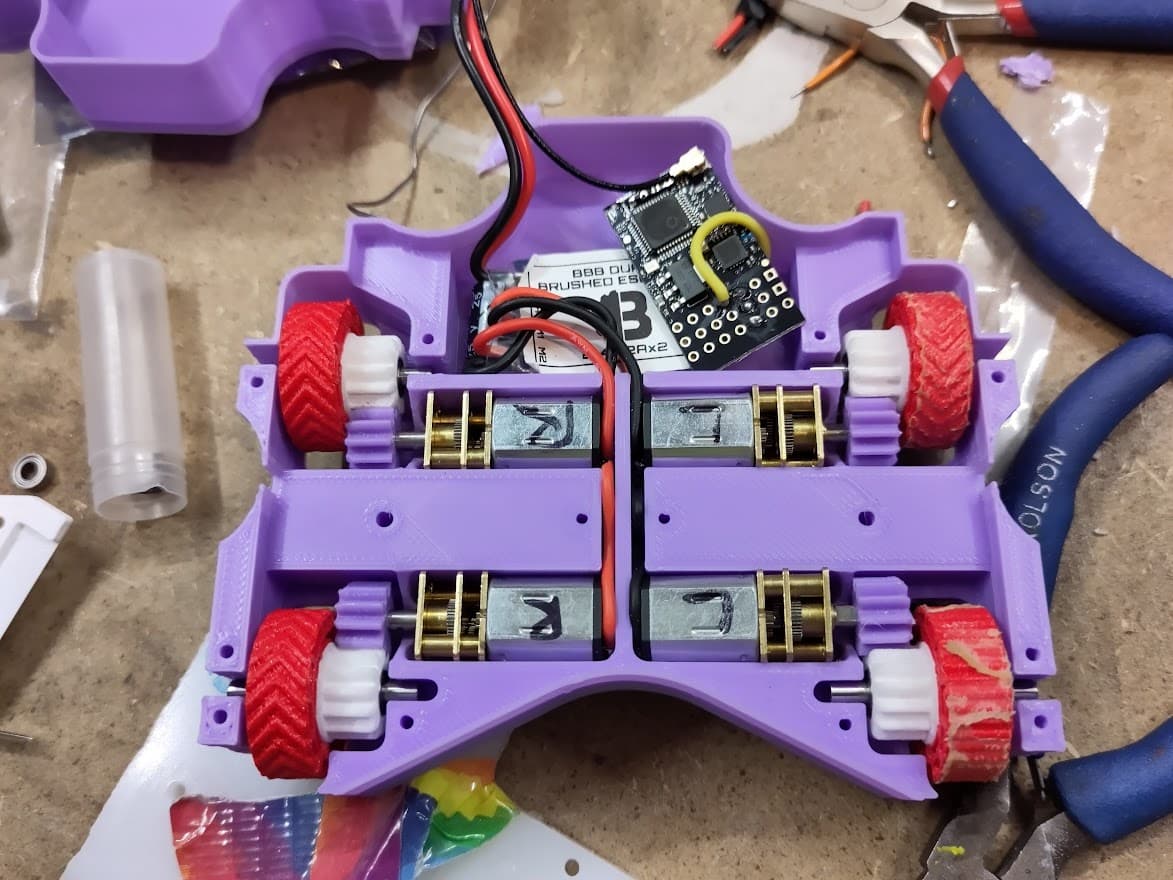
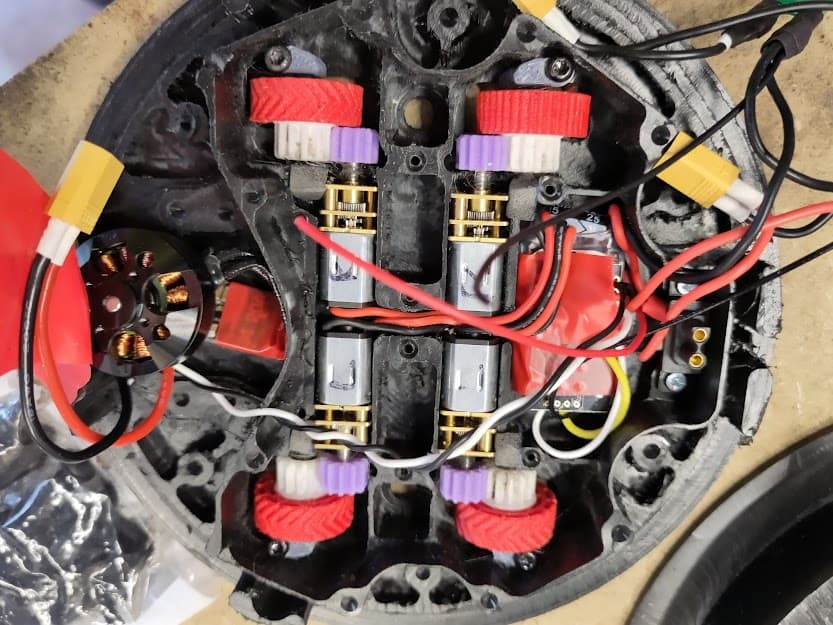
- Use LOTS (probably 8 per bot) of N20s, at 12V (maybe even getting away with a dual ant ESC)
To drive the rings obviously no brushes will be permitted. I haven’t made a spinner before so while I have a reasonable theoretical grasp I don’t have the hands-on experience to draw on. Just from a weight/power perspective I was looking at something in the 2822 range (e.g., this) but not sure if that’s really in the right range (and I haven’t looked at the Kv numbers). I’m guessing with a ring spinner I’ll need to put a bit more weight into the weapon system and a bit less into the drive, so maybe something a tad larger would be appropriate.
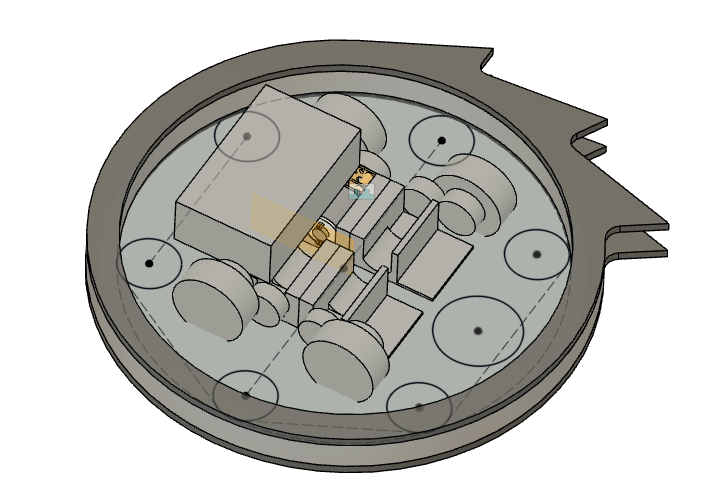
That’s all for now, more detailed CAD should be on its way and do drop in with any thoughts! Cheers.
")