A while back I attempted to make a ring-spinner-cluster at Beetleweight, which was an abject failure. The obvious solution to the problem of it being small and fiddly and impossible to get in weight is clearly to try and do the same thing, only 1/5th the size.
My thinking here was to resurrect the basic idea but, by shifting to PLAnts, not have to worry so much about things like armament, or indeed weapons, being effective. It would also allow me to try a few things out for the Beetle version at a lower cost and risk.
They key things I wanted to work on were…
- Invertibility: Originally I designed a ring spinner forgetting that the whole point of a ring spinner is it can have wheels on the top. If your ring spinner isn’t invertible (is … vertible?
 ), all you really have is an overly complex shell spinner.
), all you really have is an overly complex shell spinner. - Friction drive: For some reason I became obsessed with the weird multi-point belt friction thing. Given the forces involved, keeping some level of compliance seemed prudent but not at the expense of, well, everything.
- Complexity: Obviously the last version just had this stupid amount of CNC’d HDPE, so that had to go.
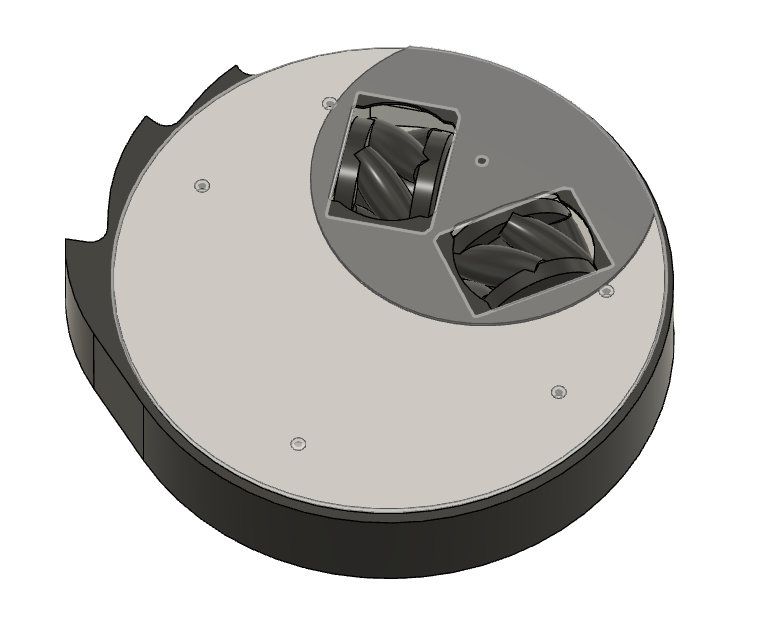
The first thing to do (for me anyway) is figure out roughly how big it’s going to be. Using the trusty 1806 outrunner for weapon drive dictated it be 25mm or so tall, and some quick maths™ indicated that I would need to have around 130-150mm of effective diameter to get a decent tip speed without too much gearing.
Next question was, how the bejeebles to get it to move around when there’s only a ~100mm cylinder to fit it in? My initial thought was mechanum wheels:
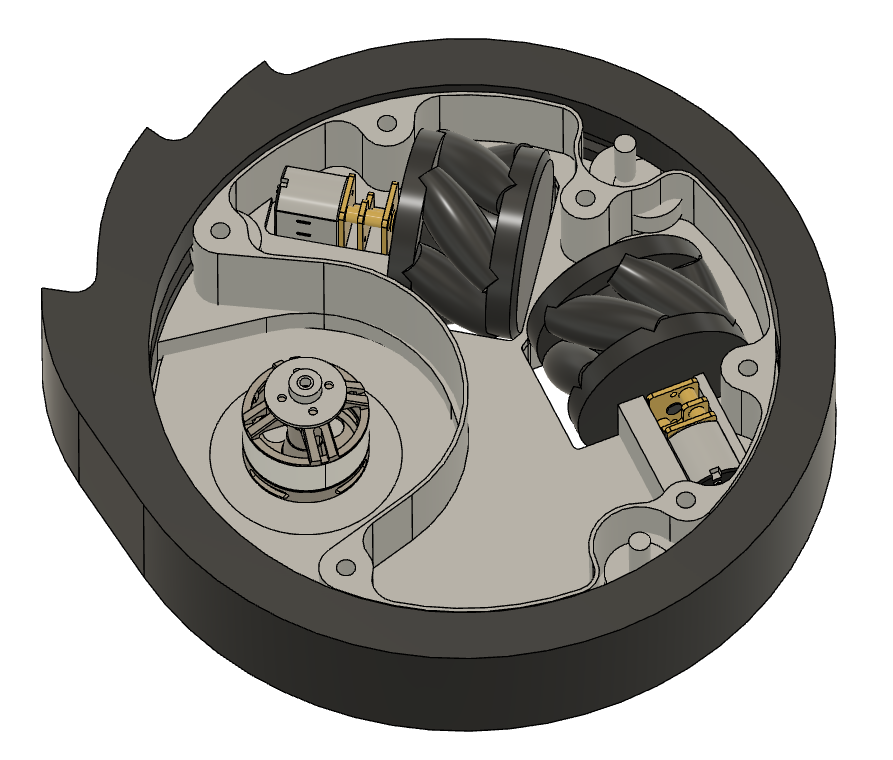
These (from Pimoroni) were the smallest mechanums I could find, at 37mm diameter, and they still needed to be offset at a weird angle to remotely fit in. Note they had to be at the front to fit into the pupil of the eye, otherwise I could’ve just had normal wheels at the sides. The idea here is that the mechanums will driving sideways will turn the whole bot by dint of their being offset, which indeed worked:

I quite like the way this moved, but unfortunately the wheels are obscenely heavy, like 25g each or something, so there was no way forward here.
Cue a 179° pivot to a new design, something I’d been pondering for a while for another project:
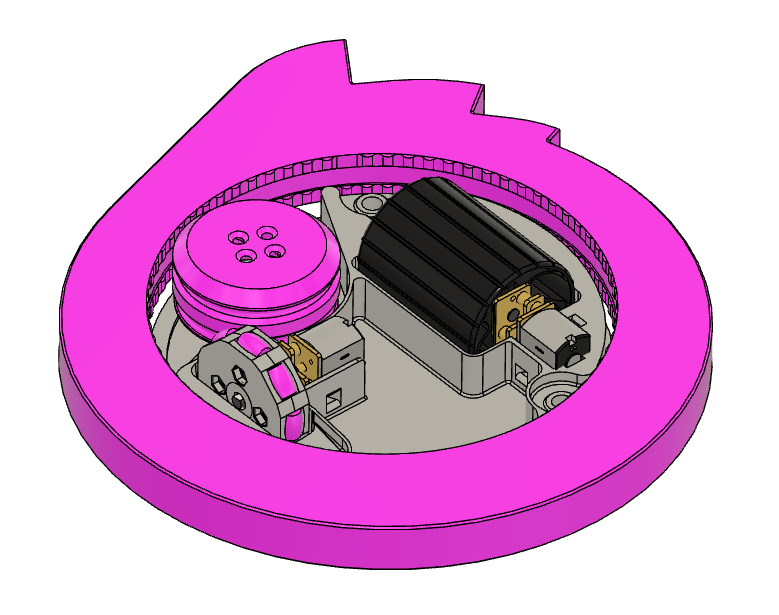
The big roller makes it go forward, and the omniwheel steers it. This did mean a small bit of wheel sticking into the white of the eye:
I think that’s acceptable though. Also note the change from “black outline with an eyebrow” to full Dame Edna glasses, with some very miquetoast teeth on the inside which proved excellent for shredding the PU belt I wrapped around the driver pulley for extra grip.
I got a decent way through the build for this, aiming for the BBB W&T Ants last weekend:

(Note the TPU wheel with a very thin coating of polyurethane resin, applied with an old toothbrush - this worked really nicely).
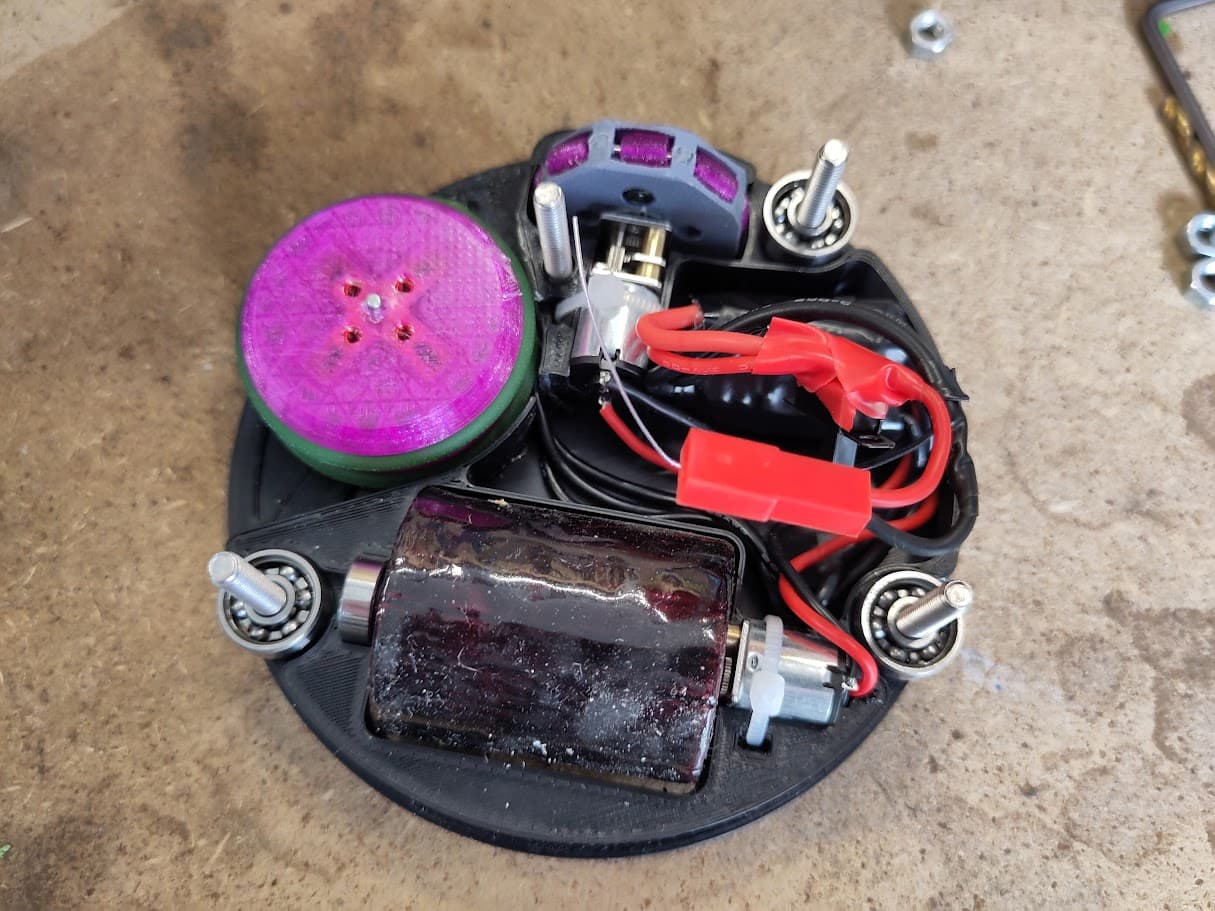
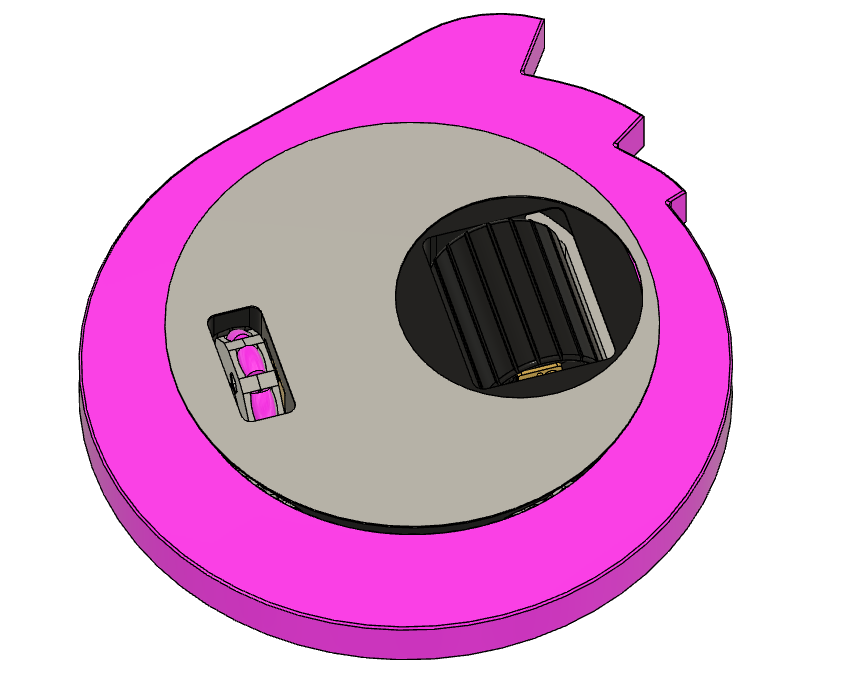
There’s just room in that gap for a battery.
The whole thing does fit together:
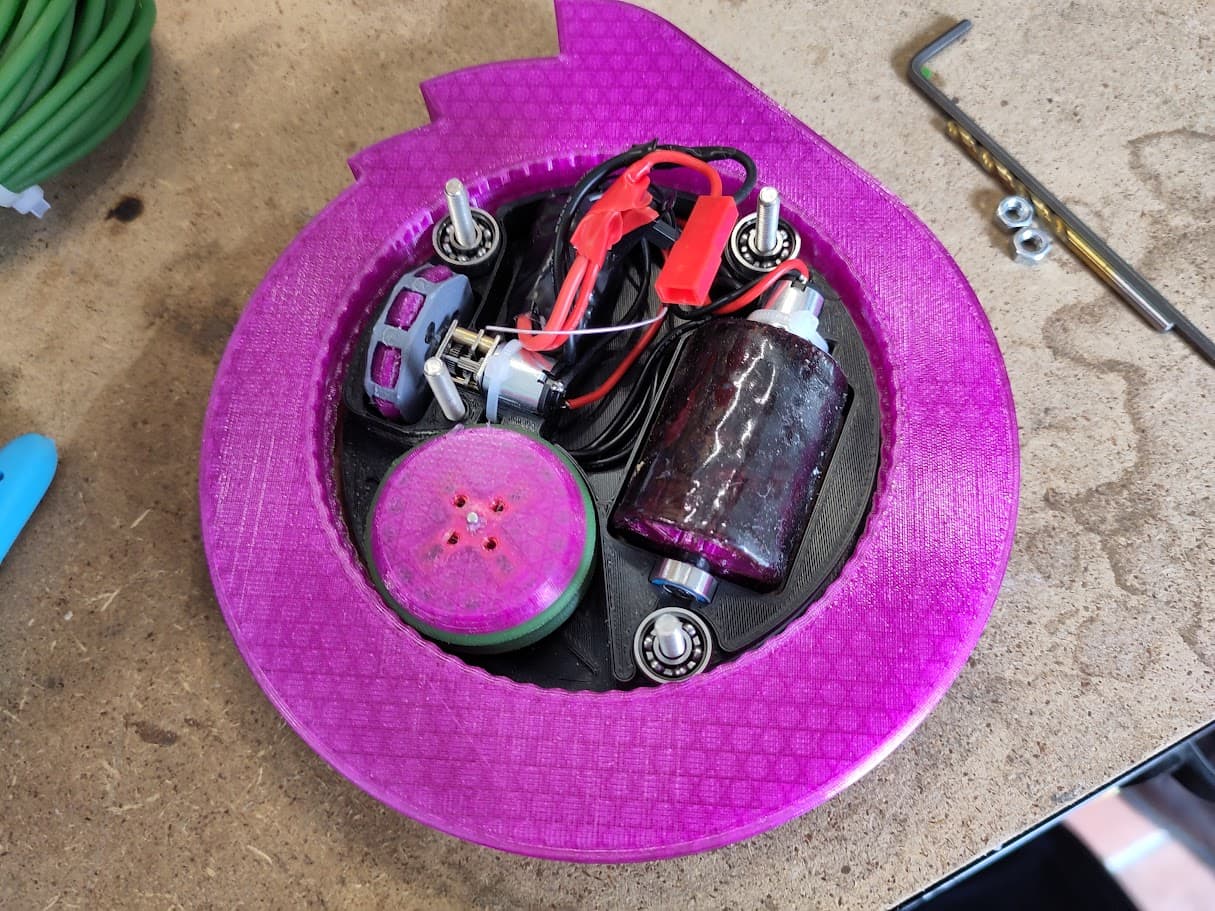
I had enough for a test drive around our AirBnB in Bristol on Saturday, but [TRAGIC PLOT TWIST] we didn’t actually enter it in PLAnts, due to the fact that there was still a little bit of work to do on it, I’d forgotten half the bits to assemble the other half of the cluster, and (perhaps more decisively) I weighed it and had only 1.56g to spare for the battery.
All the same, I’m pretty happy with how this came out. I think I can make it viable by cutting weight, although I think part of the weight and internal space issue comes down to needing to “gear up” the 2300kv motor with the big drive wheel and big ring OD. I’m considering looking for some much higher kv motors to help with this (something like this), though I’m slightly at sea on the baffling array of brushless motors out there. (Advice welcomed eagerly!)
Cheers!
