Hi folks, new here. Been watching robot combat from the sidelines (unless you could a plywood antweight I built years ago) for a while and I couldn’t resist it any more and fired up the CAD. After watching a lot of NHRL and BBB streams I realised I wanted:
- Fully independent, one motor per wheel 4WD
- Custom electronics to allow independent control of said motors
- Space to play with different weapon and armour configs in future without a full redesign
- Easy to fix and maintain
- As compact and integrated as possible, so that I can have
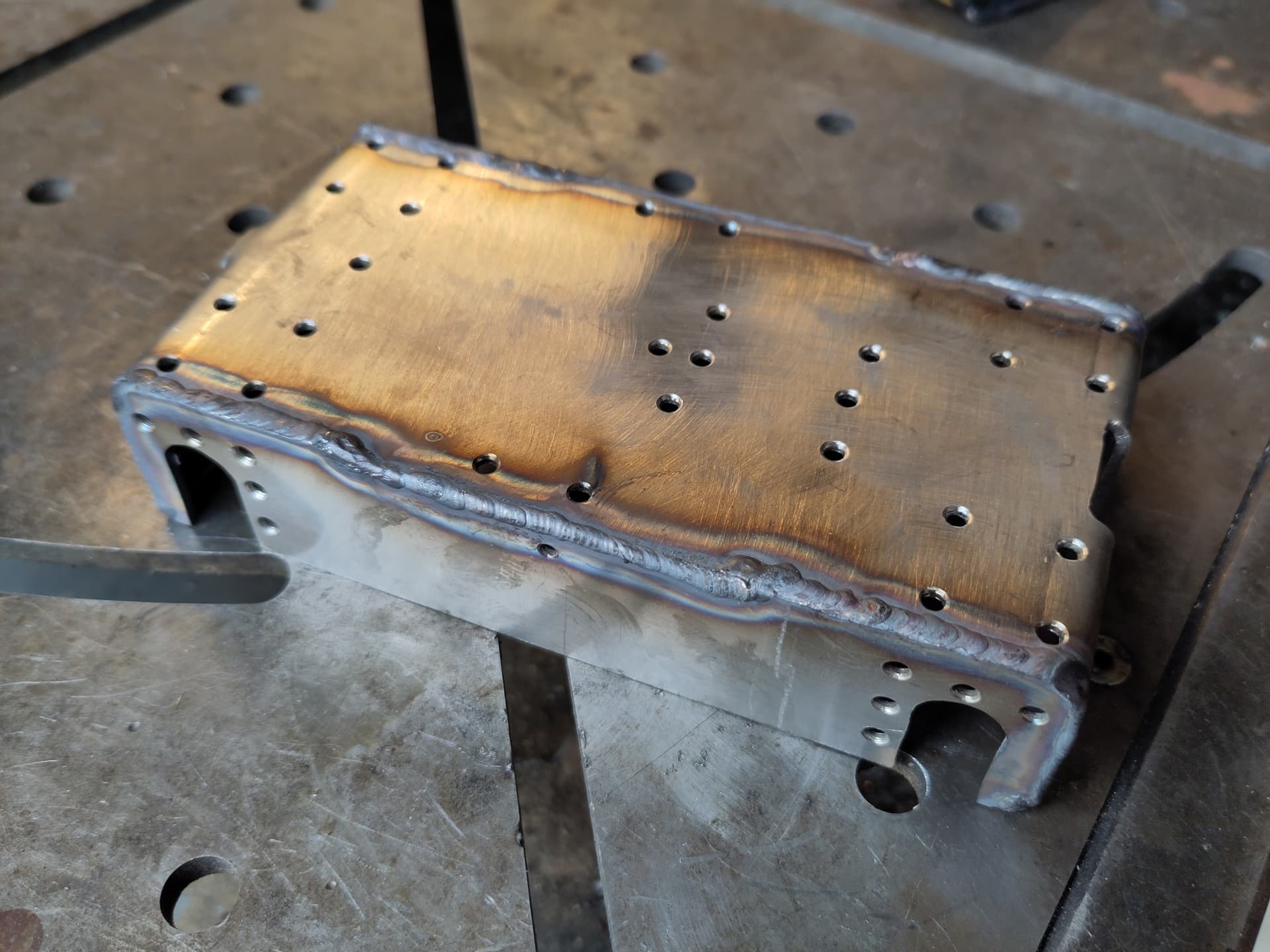
- As much mirror polished stainless steel as possible, for the bling (also I need to justify the TIG welder I bought in Lidl somehow…)
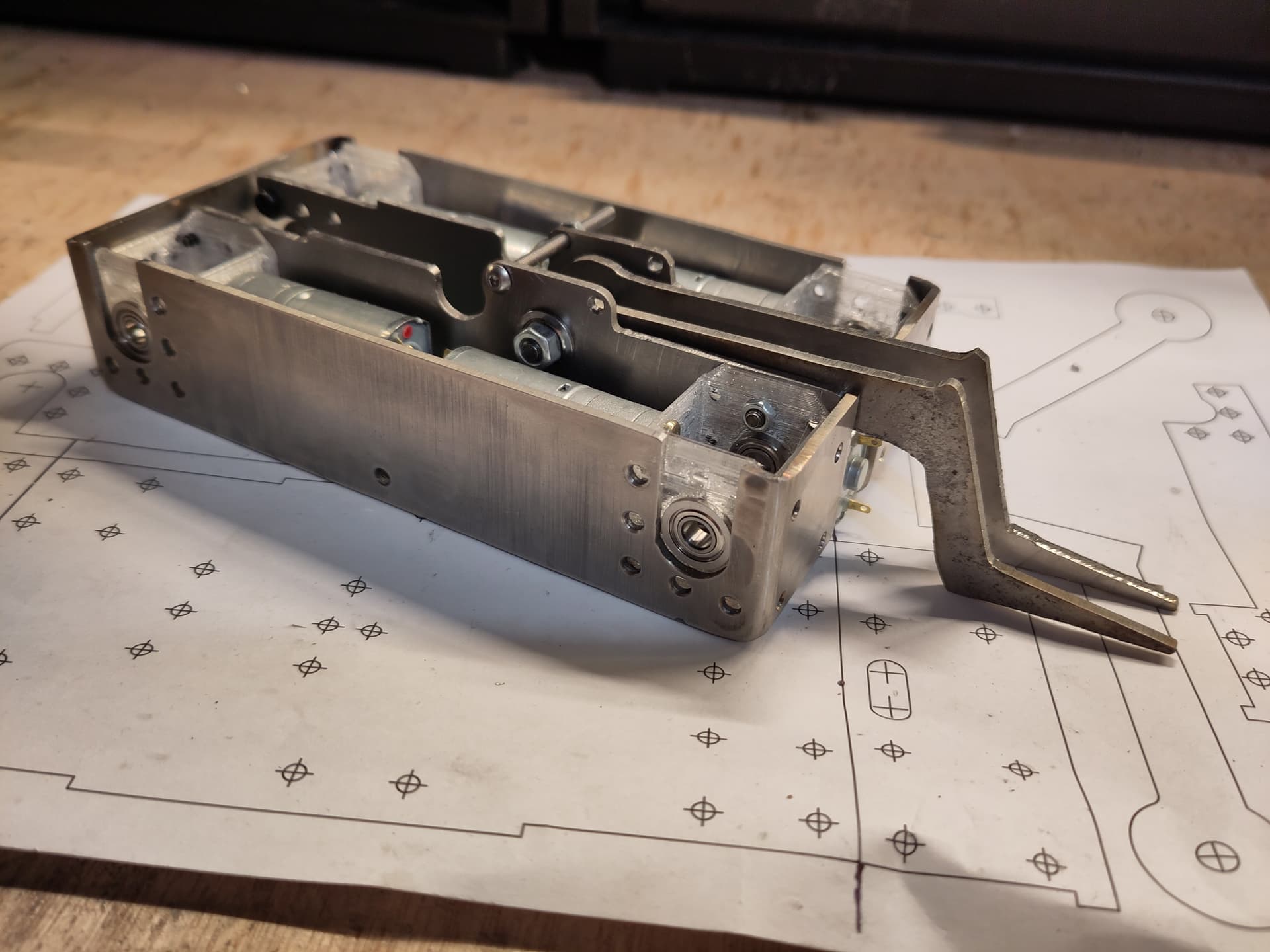
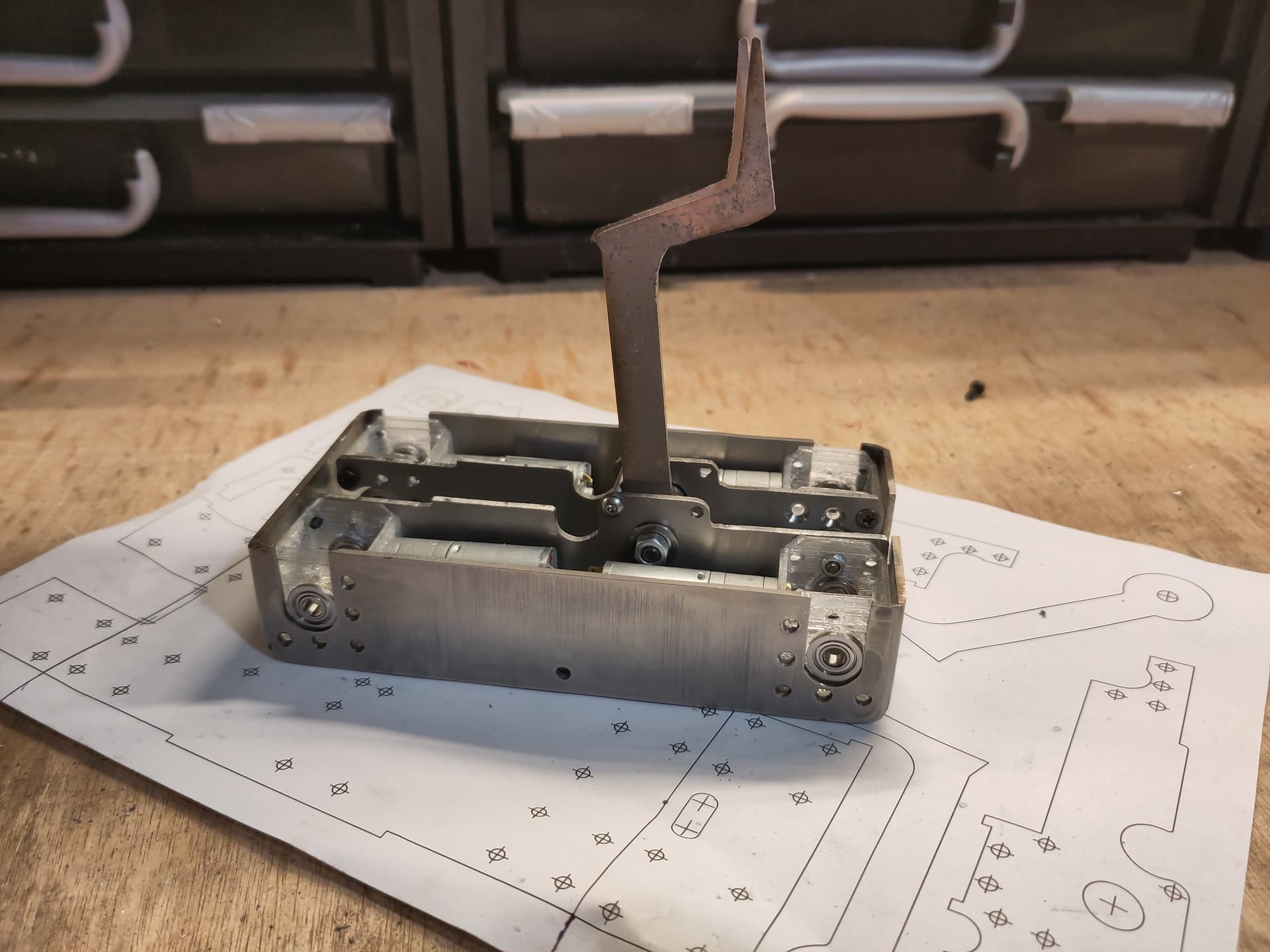
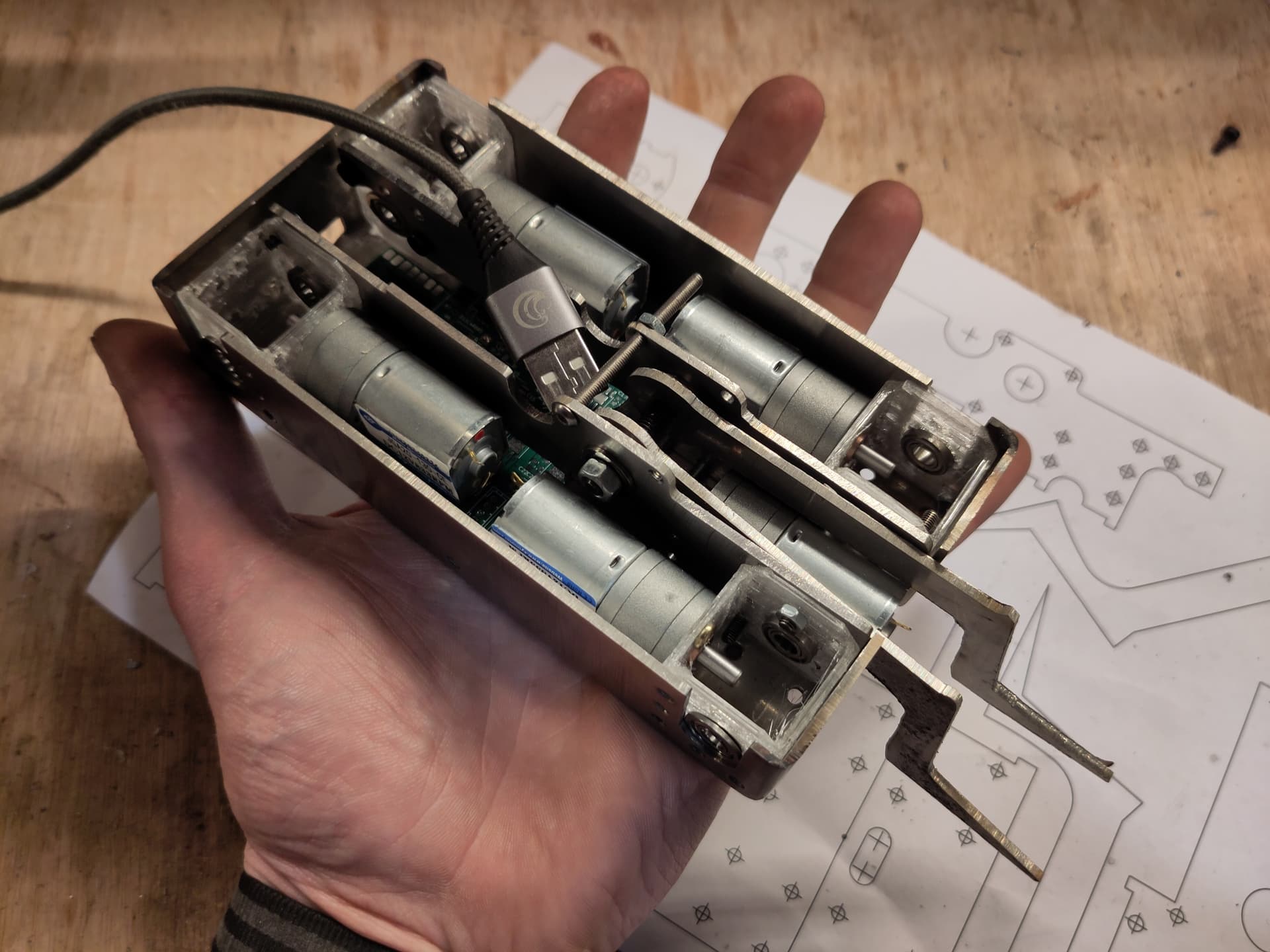
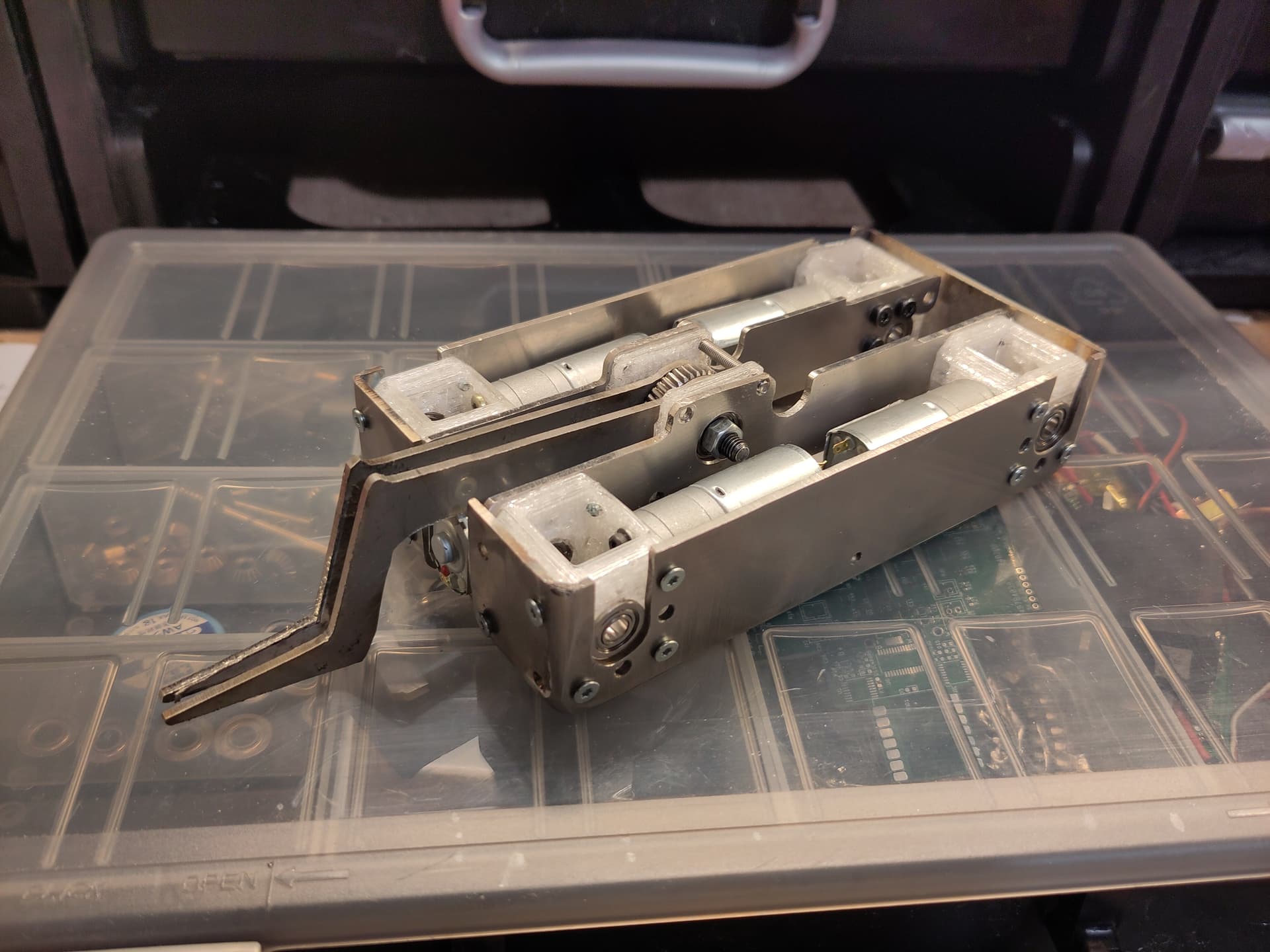
After weeks or months (time is immaterial, there is only robot) here’s where I’m at:
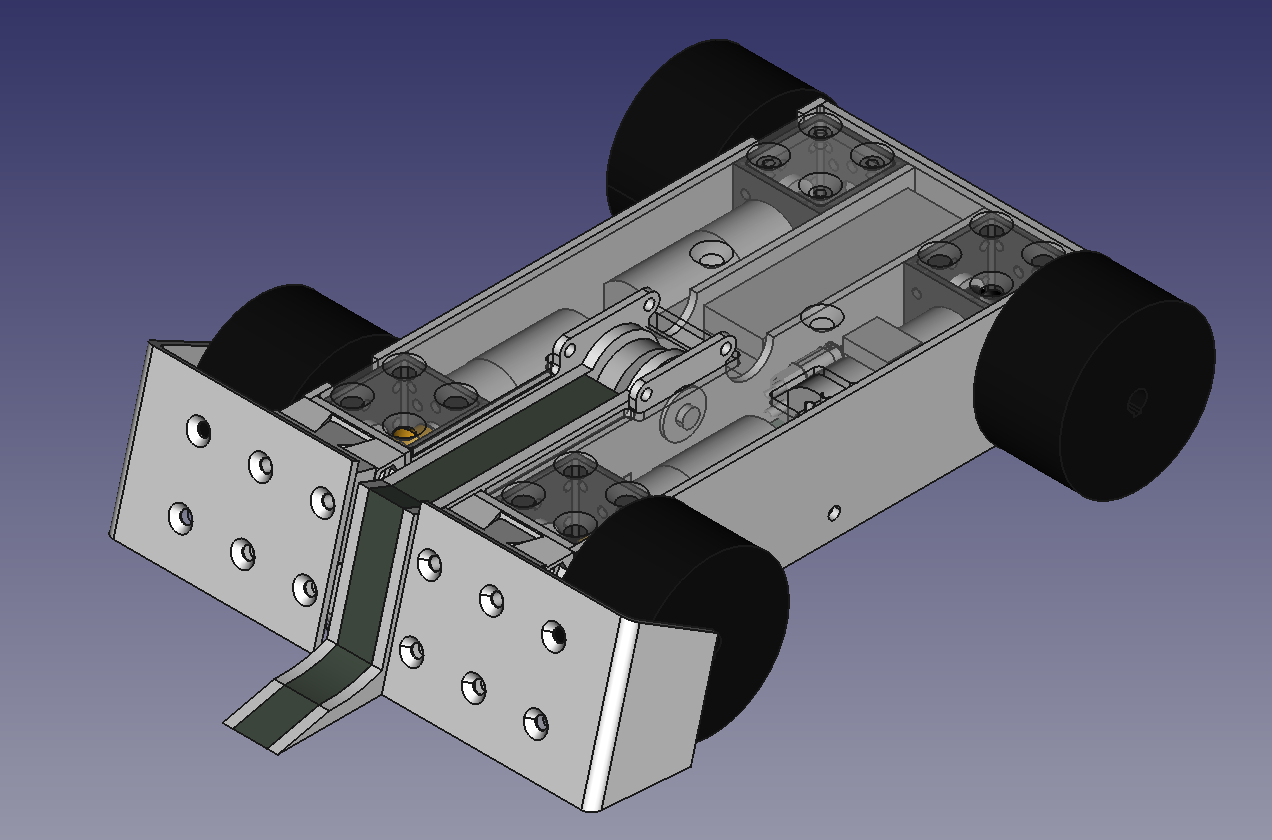
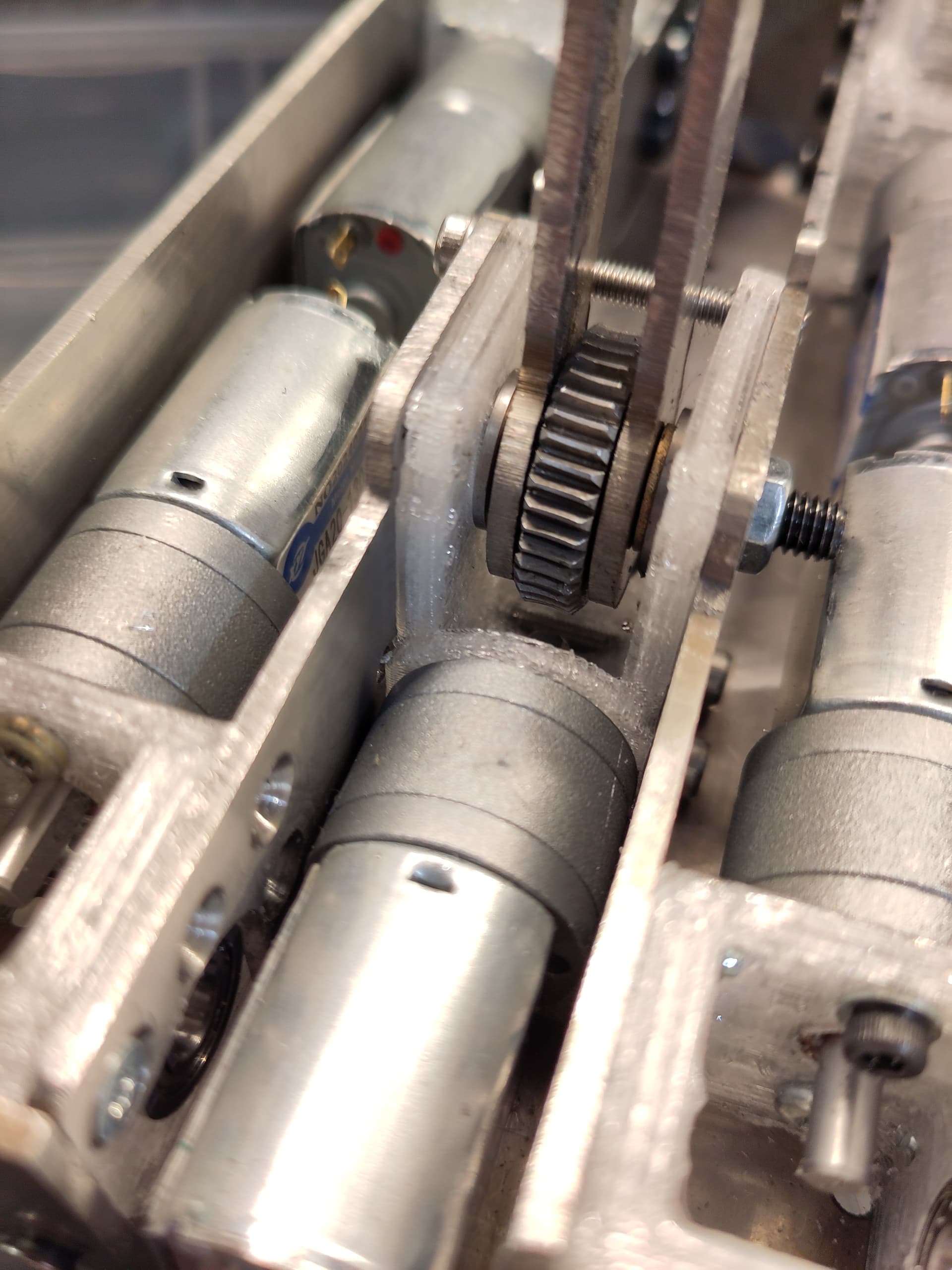
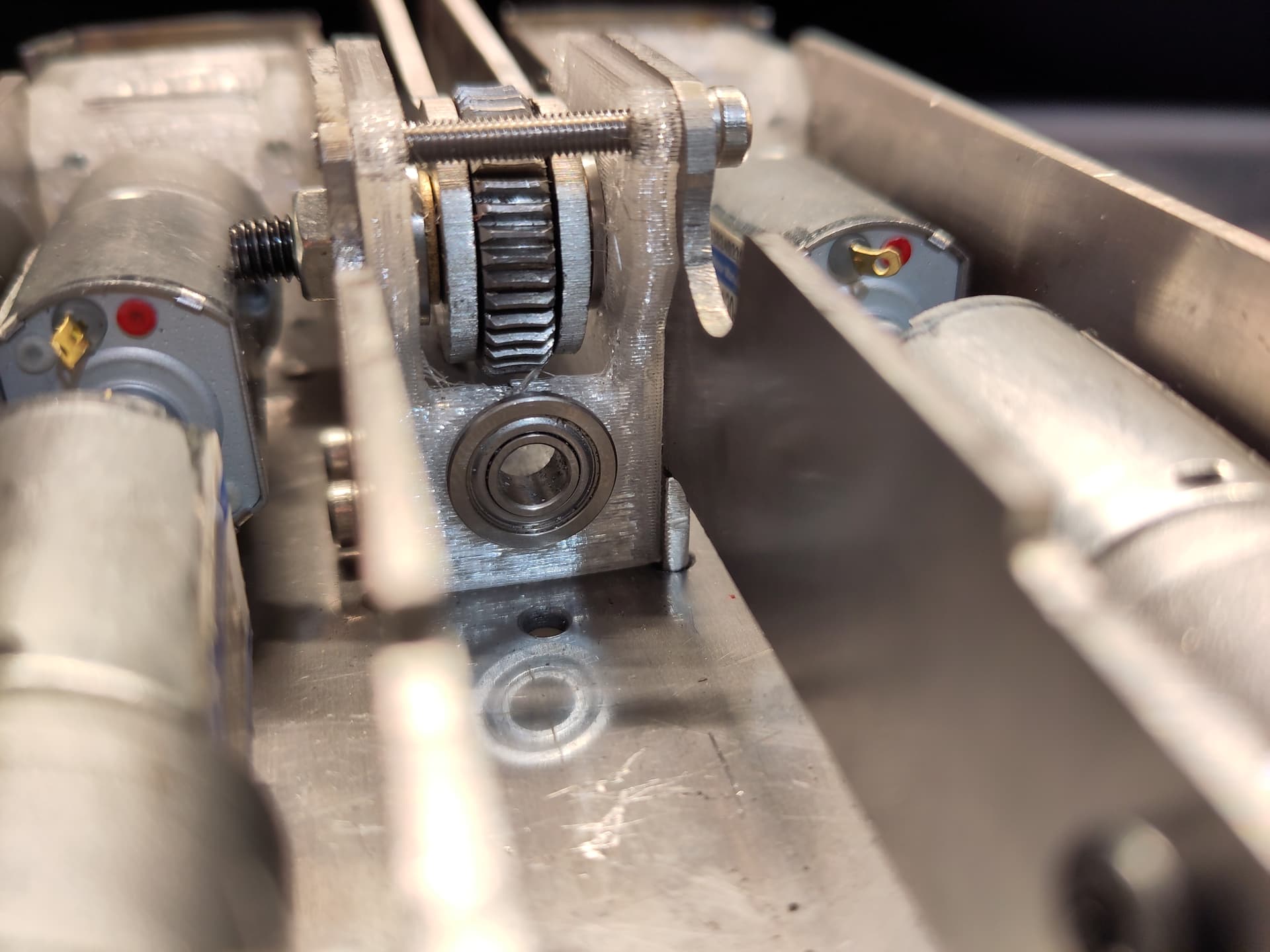
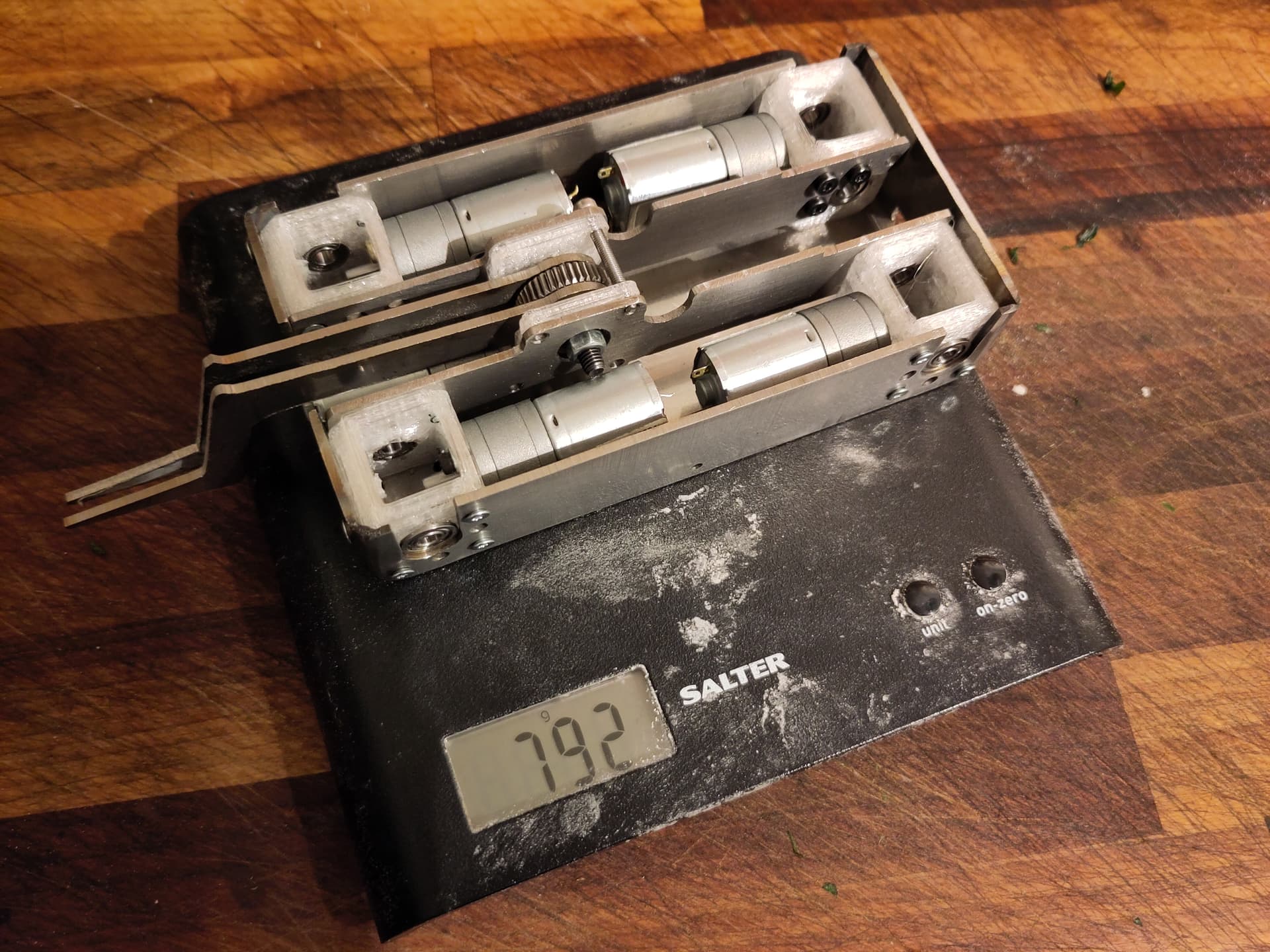
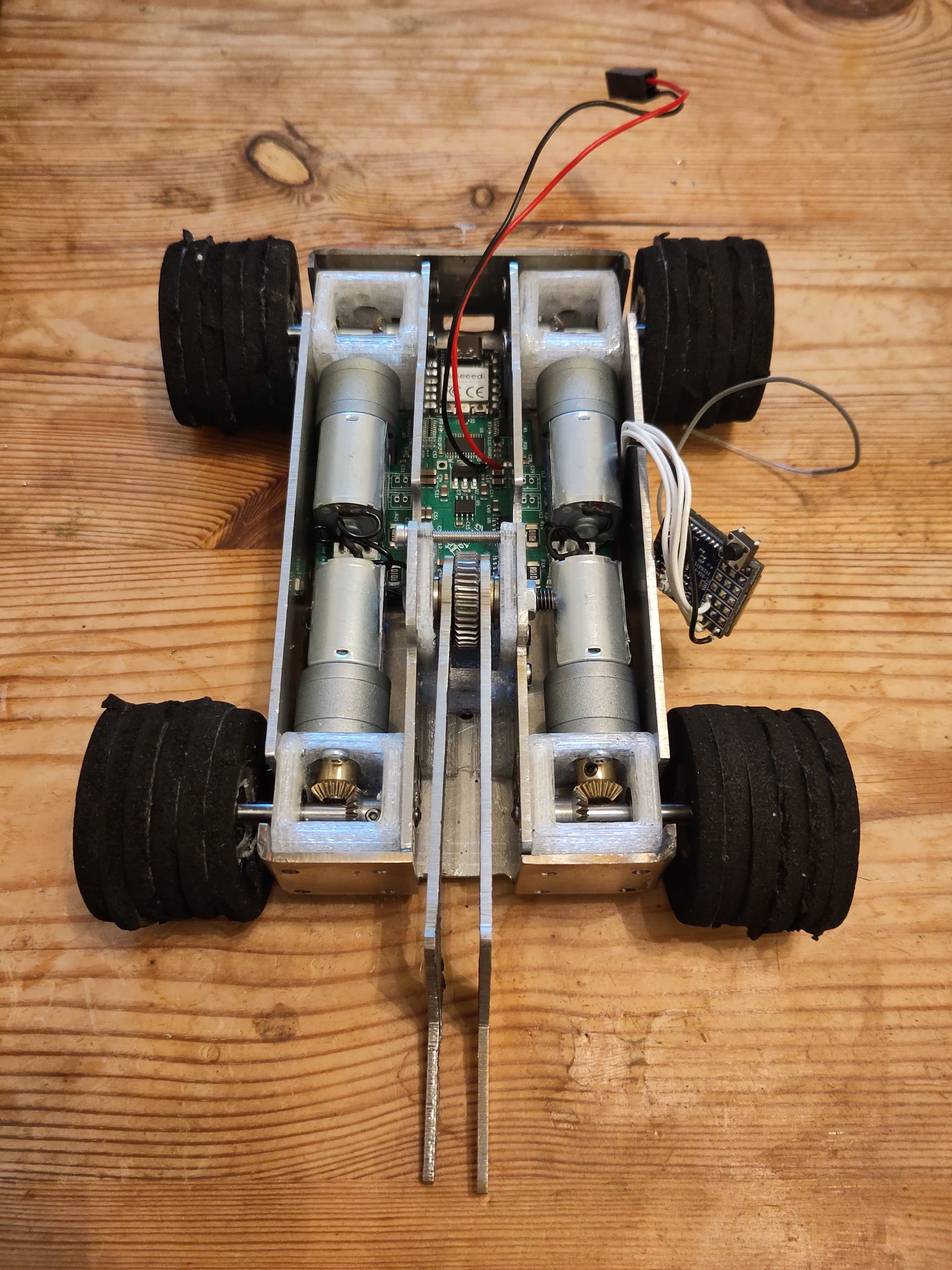
I’m very pleased with what I’ve been able to come up with. I’ve got 4x 20mm gearbox motors (the 130 short kind, as opposed to the longer BBB kind) driving 5mm output shafts via bevel gears, all connected directly to a custom PCB (which I’ll get into later) which sits on the bottom of the bot. There’s just about enough space left over for a 3s 530mAh lipo, an ELRS receiver, and a 20kg/cm worm drive lifter that uses the same motors as the drive (but with space for a longer one if I need the torque). I haven’t got a weapon controller yet, but there’s ample space (honestly!) for something small and custom somewhere dumb.
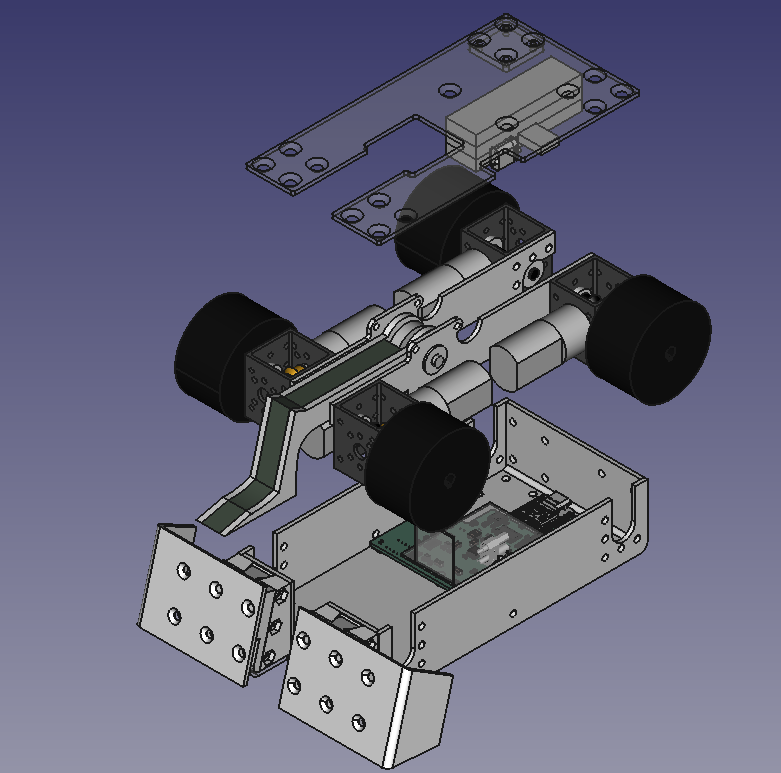
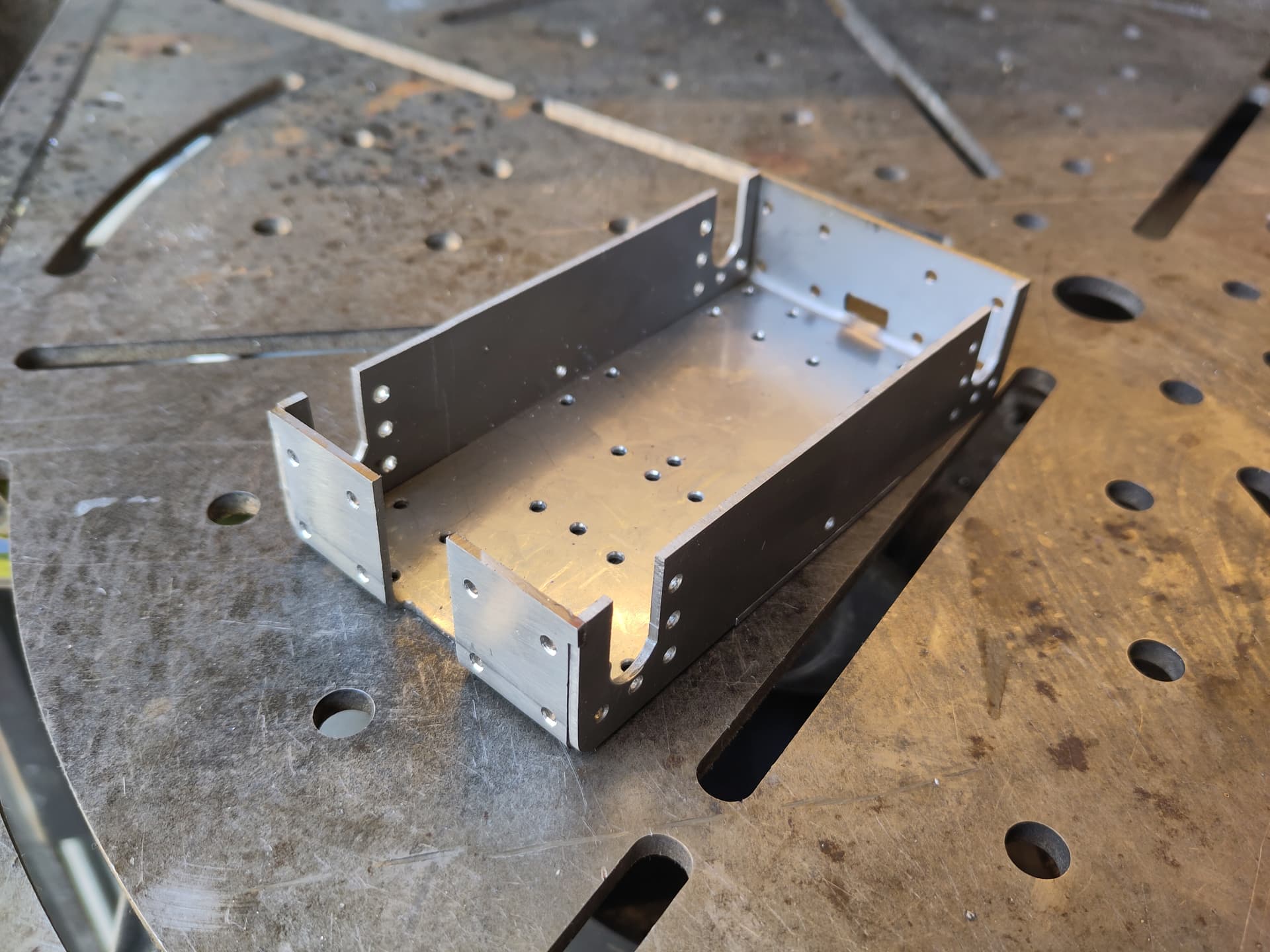
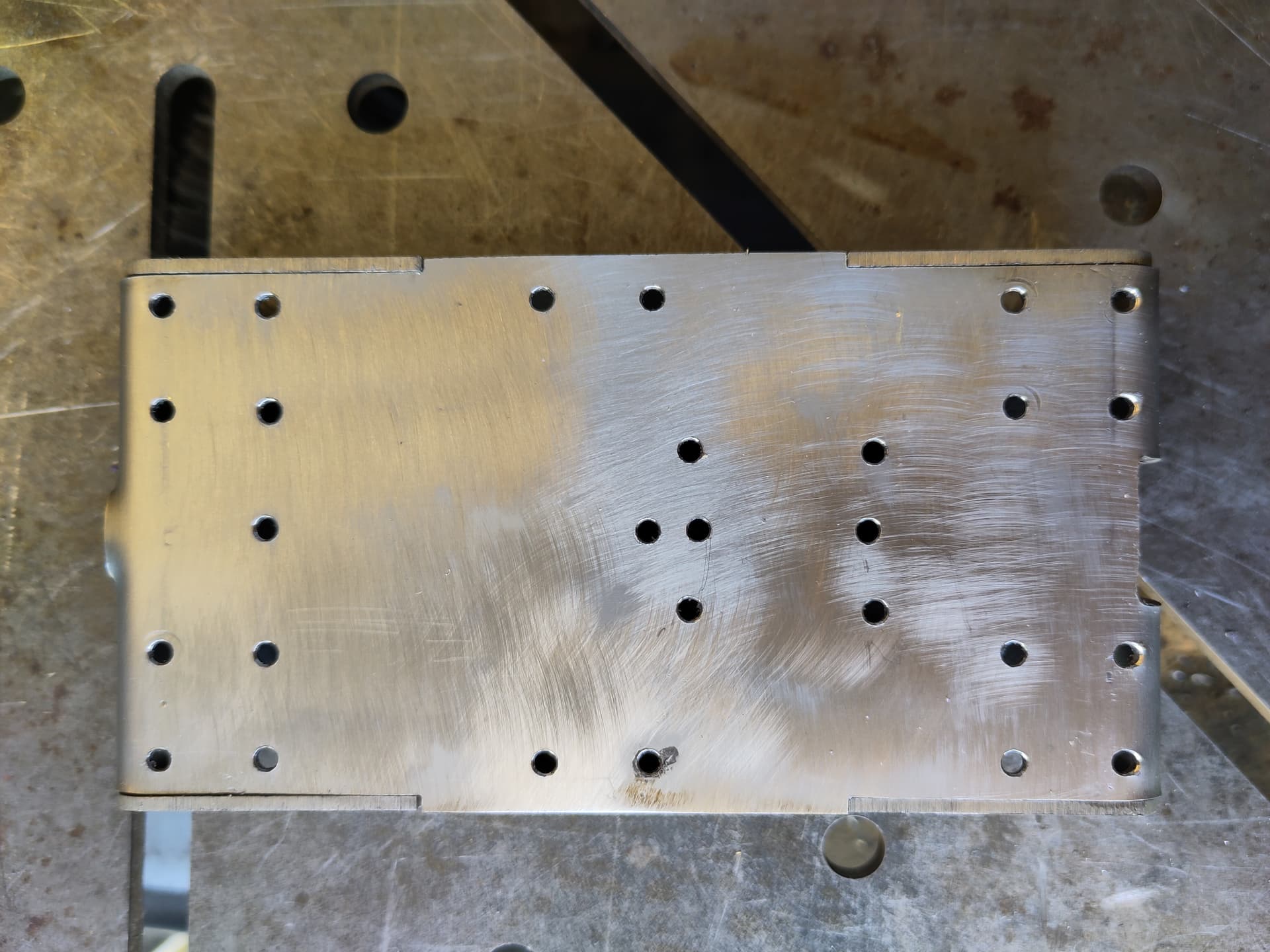
In terms of maintainability, the weapon and drive are connected to the central bulkhead, so that the whole assembly can be lifted from the chassis tub after removing a few screws and disconnecting some plugs. As many parts as possible are are symmetrical, both so I can use them in any orientation to cut down on spare parts and also avoid mistakes like making six left wedges and zero right.
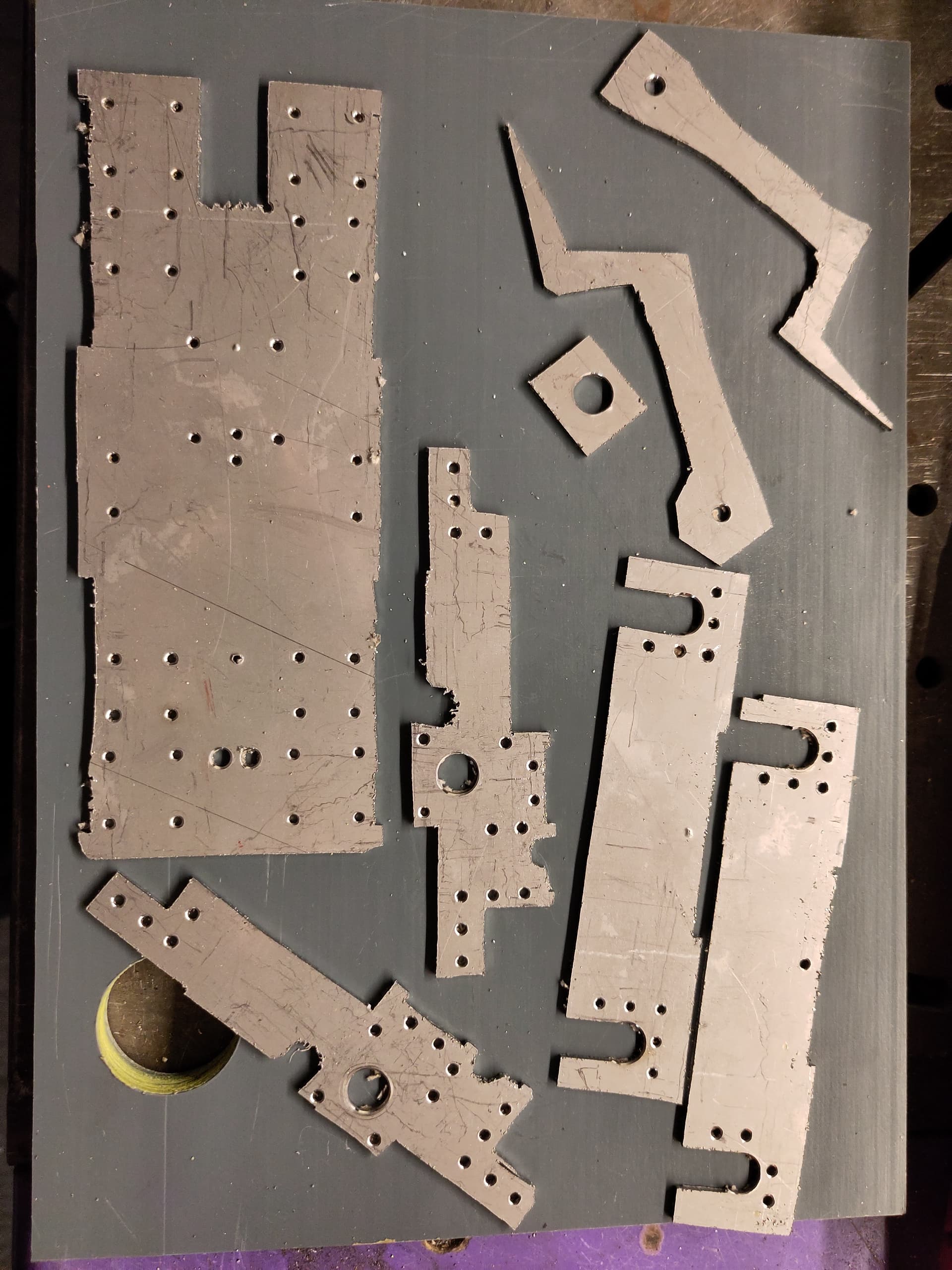
How much stainless steel did I manage to incorporate? According to my weight spreadsheet I’m allowed to make the chassis tub, bulkheads, lifter arm and wedge all out of 2mm stainless. Final external dimensions for the brick shaped main body (not including wedge attachments etc) is 79x150x34mm.
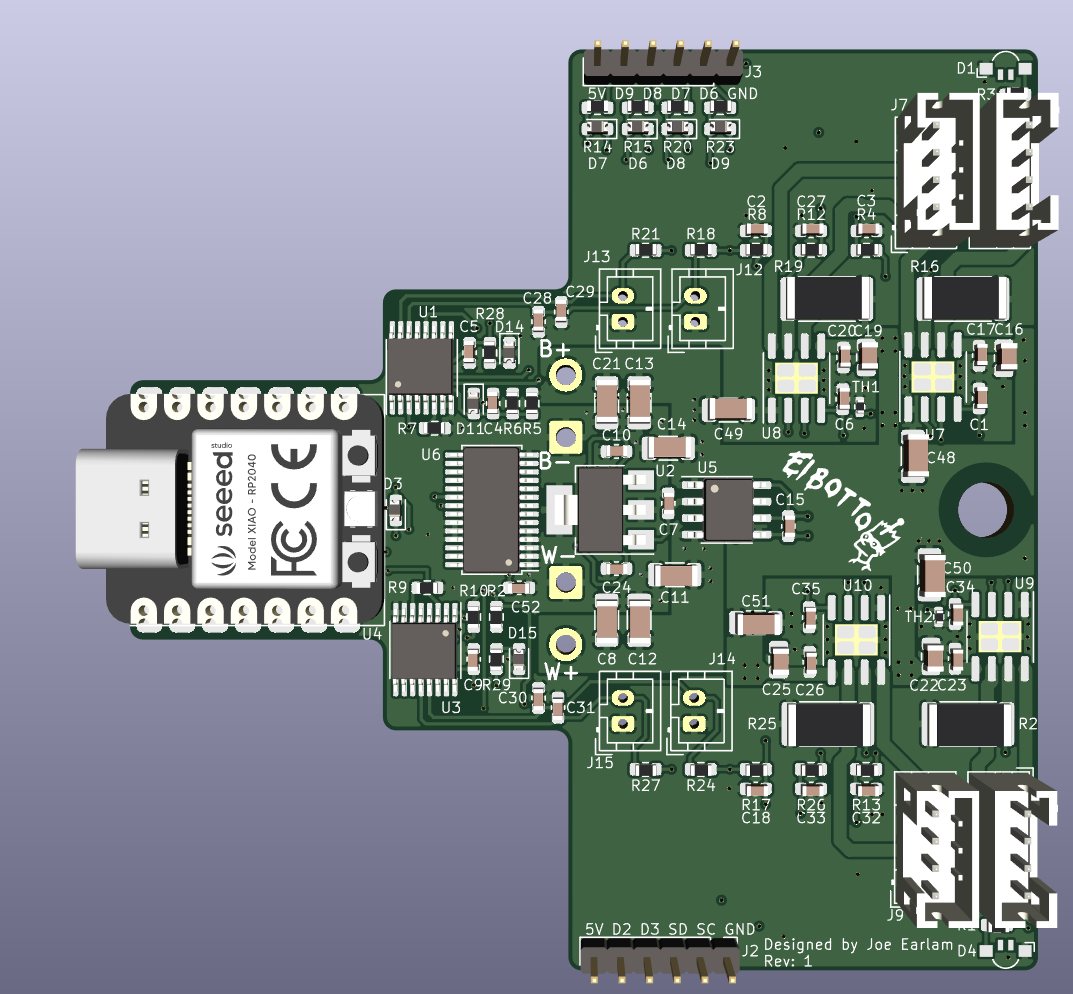
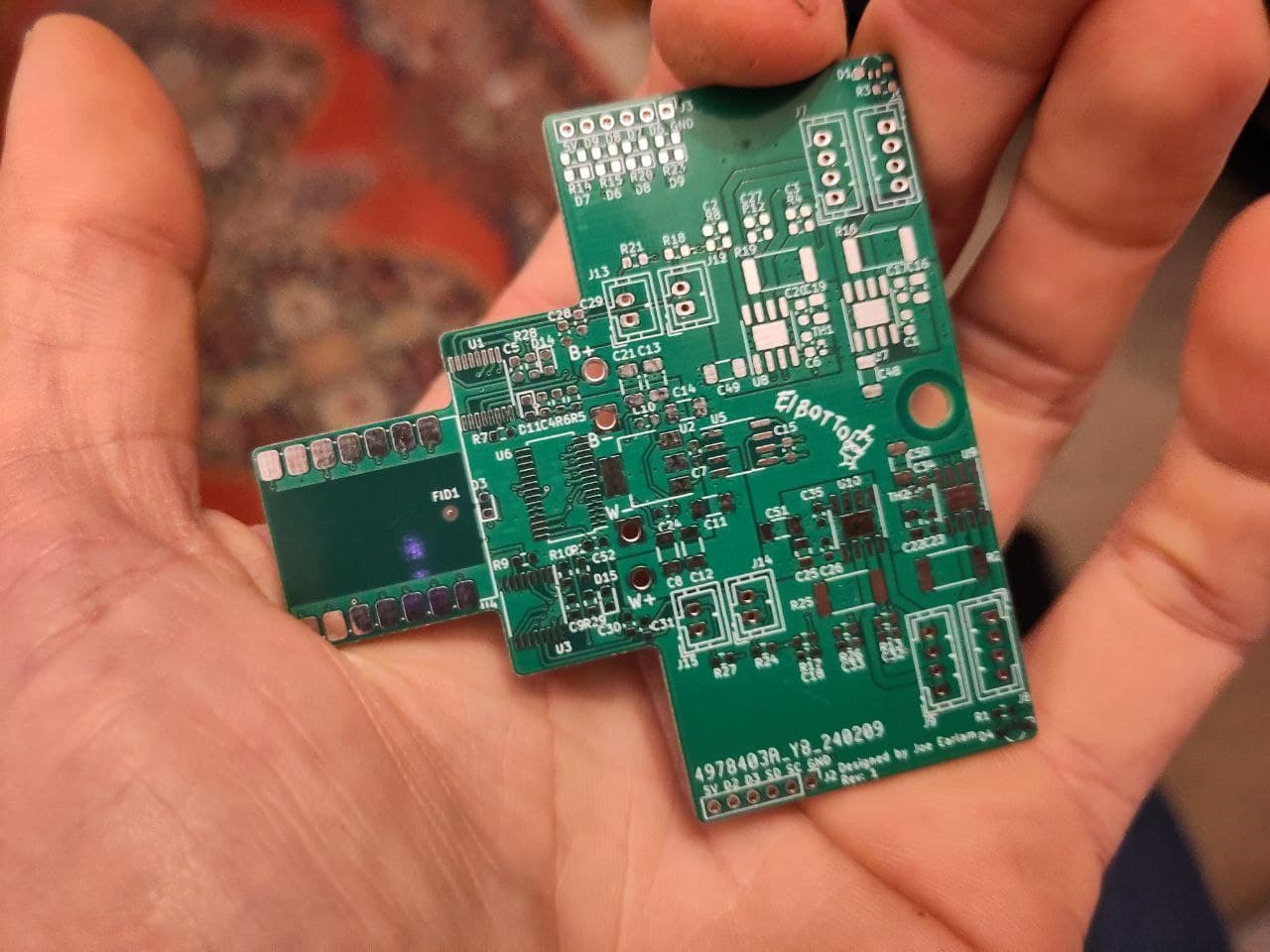
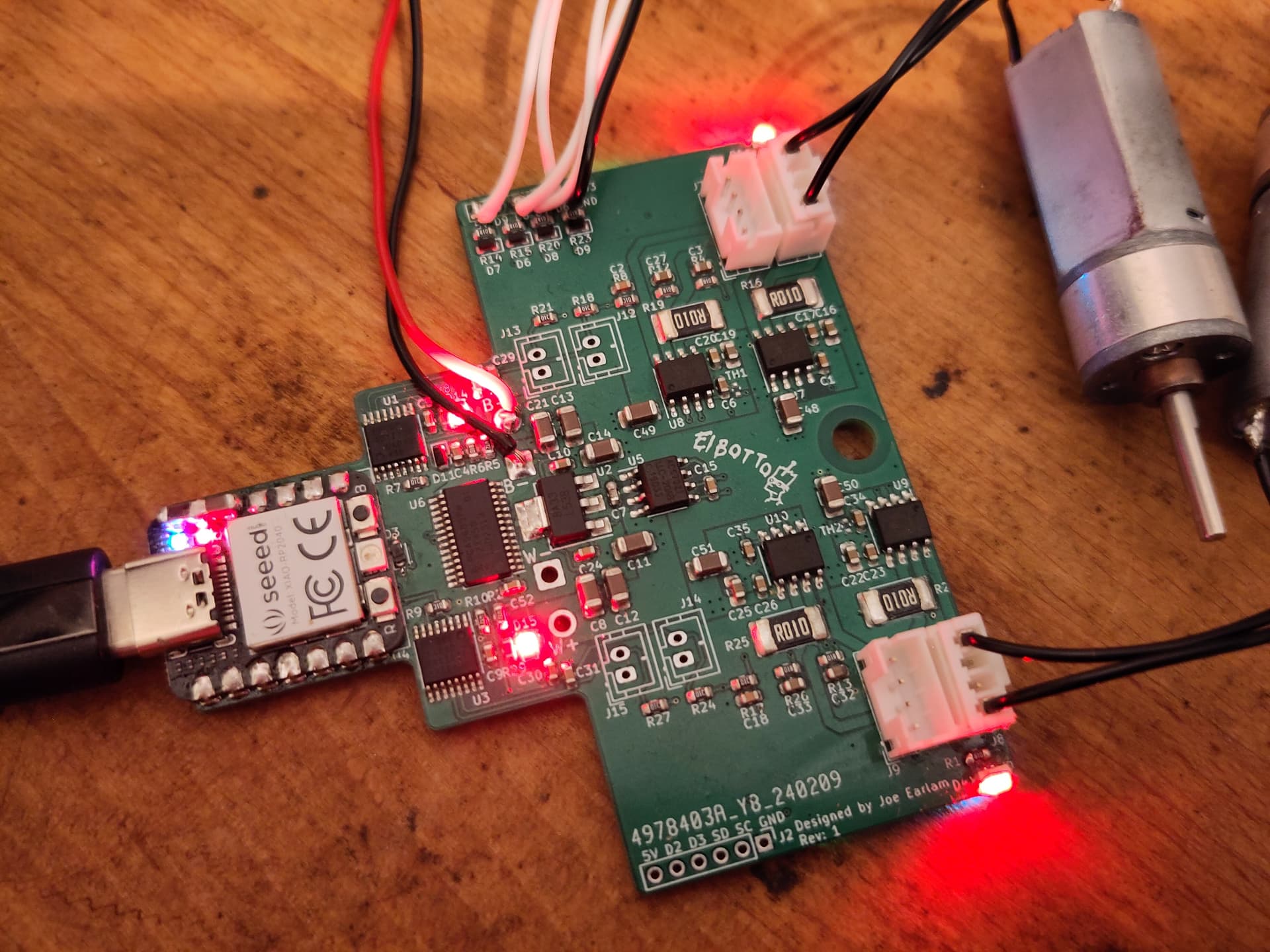
The PCB exists and should be soldered by the end of the week, so the bot is officially in progress now and I can post this as more than just a vapourbot. I’ve managed to squeeze onto the PCB a dual core microcontroller, 4x 3.5A brushed motor drive outputs, and a bunch of analogue stuff for things like drive and weapon power measurement, temperature monitoring, and also some IO for connecting a receiver and weapon controller(s). Rev2 will probably be a lot smaller as I remove bits I don’t use.
The goal with the custom PCB is mostly to handle the control mixing. I want a robot that can drift, or rotate on the spot around a single wheel, and this should allow me to handle all that in software. It also allows me to do things like motor stall detection and current limiting. I’m also a data nerd, so I’d like to stick and IMU in there somewhere and do some datalogging. I think it would be cool to watch the graphs synched to a fight video.
So that’s where I’m at! I’m actually a little apprehensive about posting because I feel somehow like I’m splitting the difference between noob and tryhard, so please don’t hold back with feedback, I probably won’t cry. I have a few ideas where the design is lacking and which bits are going to fail, but I’d like to hear other people’s opinions too.
Thank you for reading!
PS. If anyone gets the reference with the name, please let me know where to get Bristol Bad Film Club stickers.
PPS. It has RGB underglow, of course.