Forklift Certified Antweights
Hey all, seeing as the Boom Zoom build log was so well received I figured I’d do some writeups about the numerous antweight robots I’ve done too. My approach to antweights is pretty different to how I approach beetles. They’re much cheaper and easier to build, which makes them the ideal weight class for experimentation. These writeups won’t be as detailed as my Boom Zoom build log, I haven’t kept the same level of notes or taken as many pictures. That being said, I hope you enjoy!
Baby Boomer
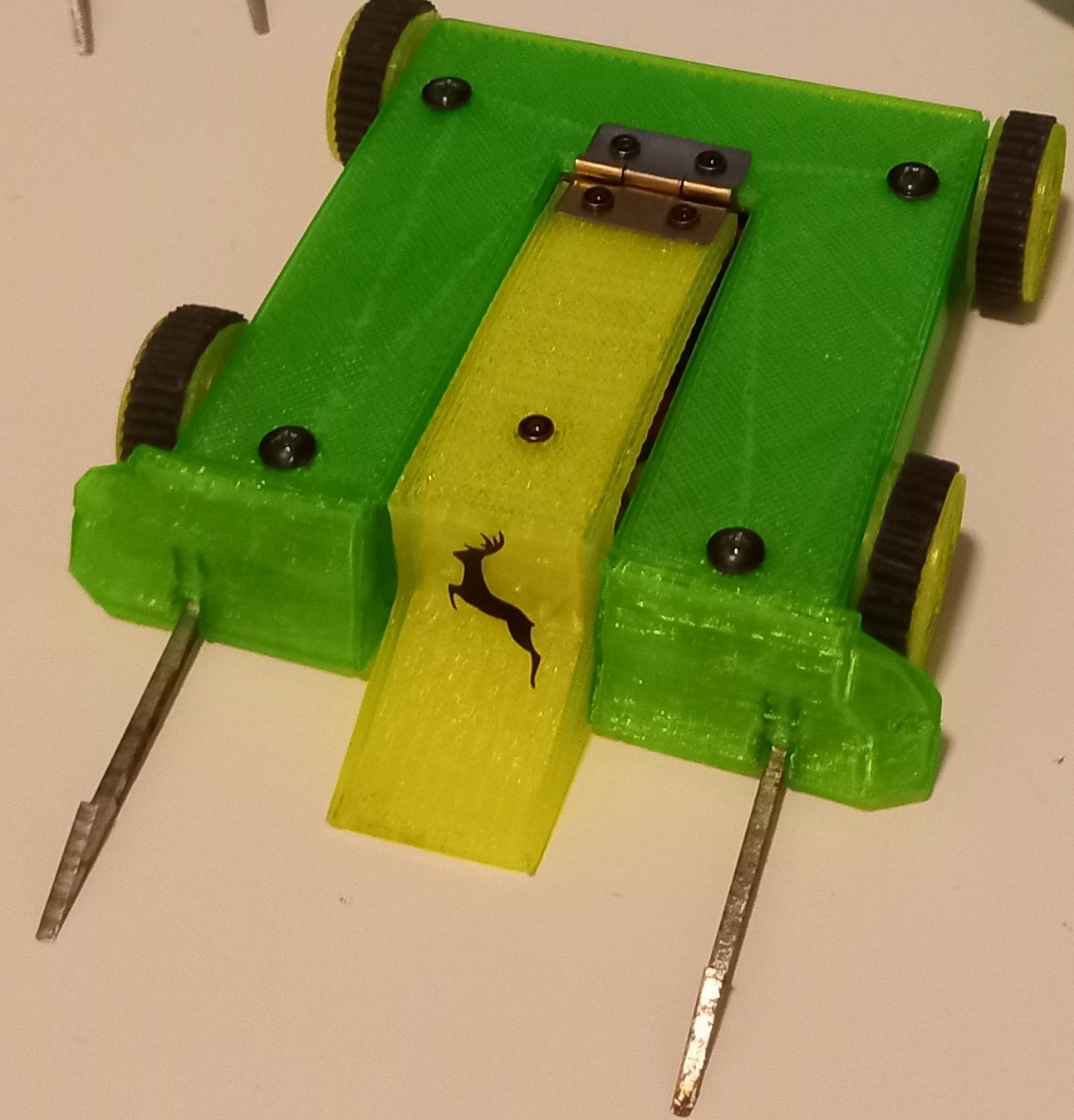
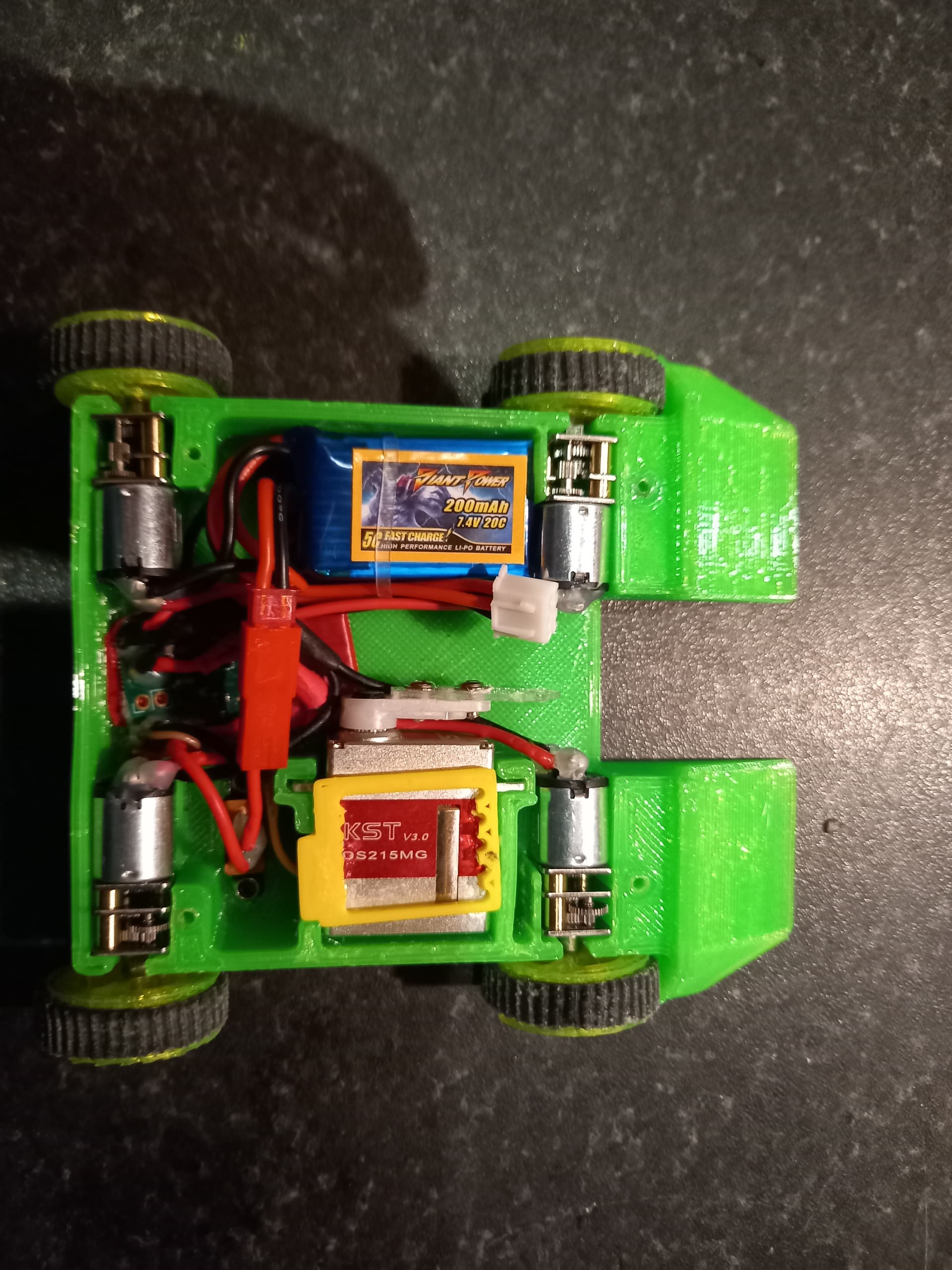
My first antweight, and a scaled down version of my first beetleweight Boom Zoom, Baby Boomer is a 4 wheel drive servo lifter. It uses the amazing Malenki Nano esc/receiver, 4x1000rpm N10 drive motors, a KST DS215MG servo for the weapon and a 200mah 2S Lipo battery. The chassis, lifter and wheels are 95A TPU, and the silicon tyres are from nutsandbots.co.uk. The forks are 2mm hardox held in place by 2mm silver steel rod press fit into the fronts. A layer of 0.5mm grade 5 titanium is sandwiched into the lid, which has the double benefit of providing some rigidity to the chassis whilst also protecting the internals from overhead attack weapons.

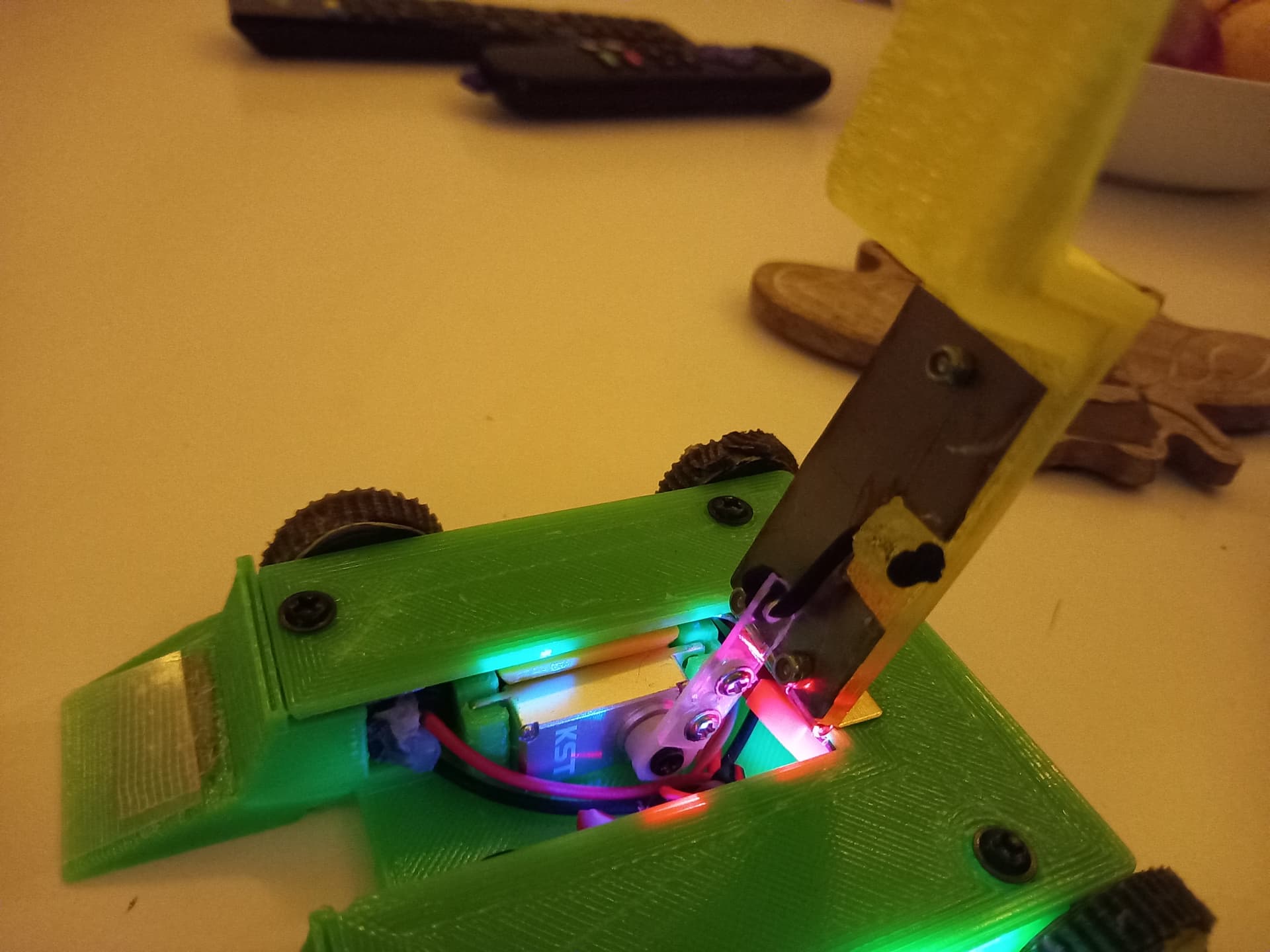
Like Boom Zoom, the lifter isn’t directly linked to the servo, instead using an indirect linkage and piece of elastic for retraction. A 20mm brass hinge off ebay acts as the pivot for the lifter.The fork setup on the front can be swapped out for a wedge config, which slots into place and is secured by the same mounting screws that hold the top plate on.
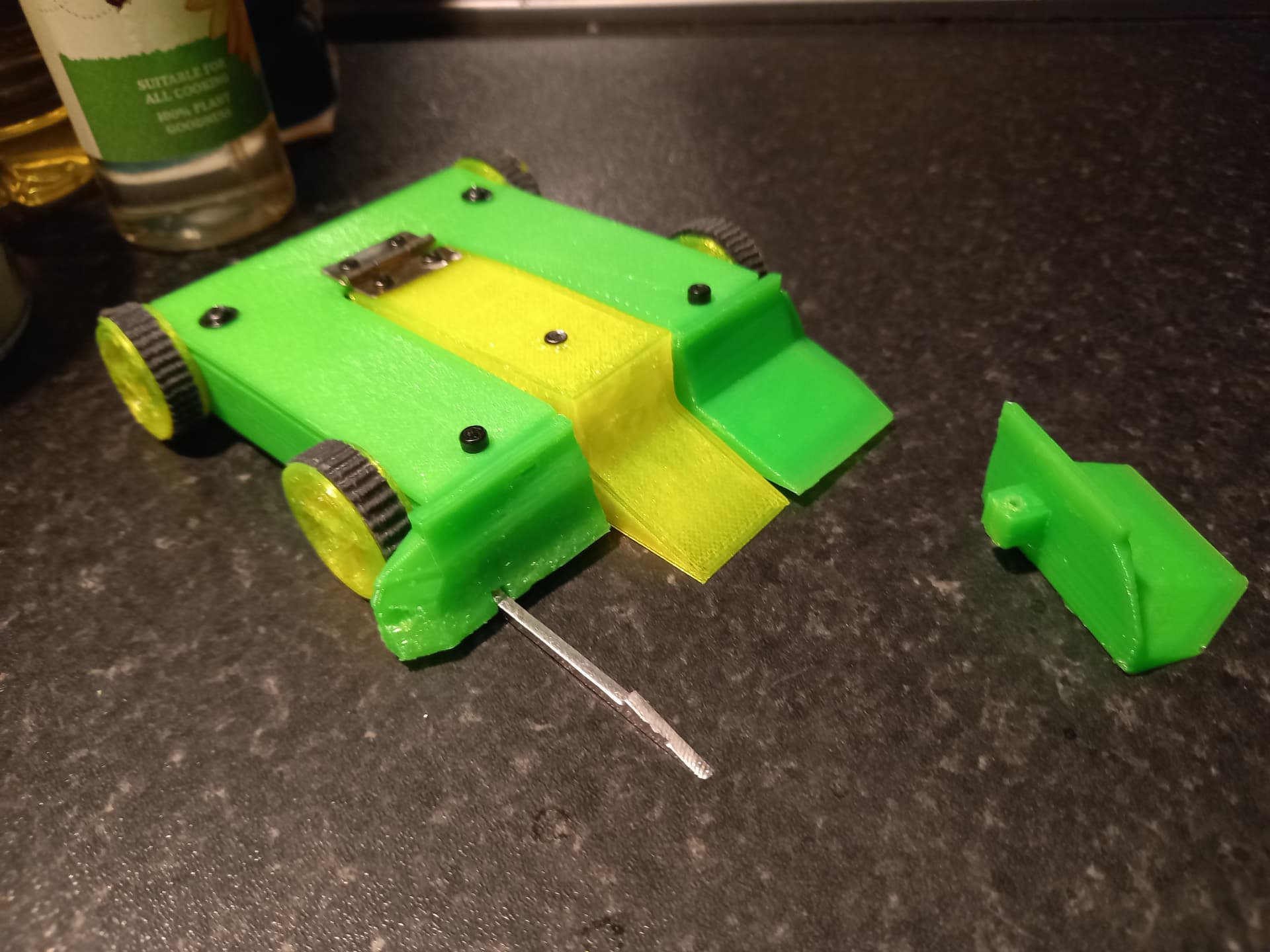
This combined with the ability to charge the robot by lifting up the lifter to access the balance port make it a piece of cake to run, and I’ve found it very rarely takes any worse damage than a wheel popping off or a fork getting a bit bent. It’s been a great starting point for getting into ants, learning which materials work and don’t work, and it’s probably seen more fights than any of my other robots at this point, being an absolute mainstay of my team.
Last but not least, an earlier version of Baby Boomer was the robot I got my first ever event win with at SCAR 3, so I definitely have a soft spot for it. It’s also placed third in the 23/24 RoboDojo Ant League and 2nd at AWS 66!
Grandmaster Smash

Grandmaster Smash is a 2 wheel drive vertical spinner, but with this I was keen to make it a little different from many of the other verts in the ant scene. Instead of following the more traditional ground game oriented shape of something like Aftershock or End Game, I went with a more reach-oriented approach, sticking the weapon out in front while keeping it off the ground with stilts. This helps negate other robot’s ground game and ensure that even if it’s not getting under opponents it can still hit them, and also I think it looks very cool.
In terms of specs, Smash uses a Malenki, 2x600rpm N10s, a 150mah 2S battery, BBB ant weapon ESC and 2300kv 1806 brushless motor. The chassis, like all my ants, is 95A TPU, and has a 0.5mm Grade 5 Ti lid with TPU dust cover for cosmetic reasons.The weapon support and struts are 3mm CNC’d polycarbonate, and I’ve added some of the same forks I use on Baby Boomer to give it a bit of ground game of its own. The disc is 3mm hardox and 44mm in diameter, weighing in at 17g. This might not seem a lot, but it’s more than enough to roof most antweights with a good enough hit. I also found during testing the robot can self right using the torque of the weapon motor if I spin all the way up, then immediately throttle down to zero which is a nice party trick! In combat Smash has a habit of bouncing around on its weapon, making for a very entertaining if not mega effective robot given the design of most ant arenas. Despite this, an older version of Smash did manage 4th place at AWS 67 somehow! I mainly run Smash at events with the 4 inch cube restriction these days, as I prefer running some of my more “out there” designs when a size limit isn’t in effect.
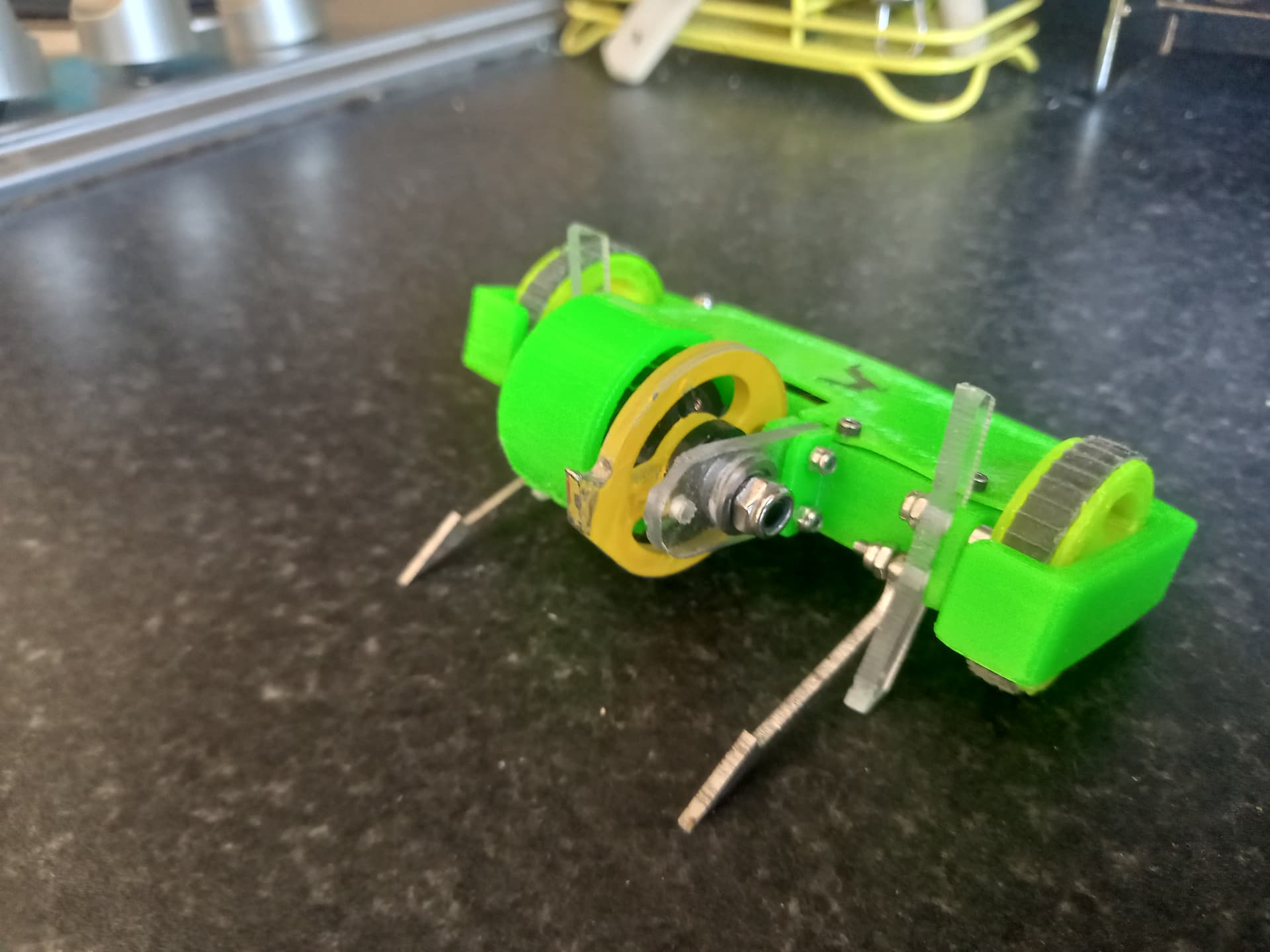
Sheer Grab/Auger The Top

This robot actually started off as a different robot entirely! When ill with COVID I set myself the challenge of designing and building an antweight in a week, using only what I had on hand. I ended up producing this thing: Sheer Grab! Once again rocking a Malenki, 2x600rpm N10s, 120mah 2S battery and a Kingmax KM1203MD servo. The big scoop and durable TPU grabbing arms made this a pretty effective design, but I grew bored of it pretty quickly. I also had 25g of weight to spare, so decided to convert it to something a bit more destructive. I was very close to turning it into a hammer saw, but was instead convinced by Sion to make it a drillbot.

When doing this I took inspiration from It’s Only A Drill, Shakey’s lethal 4wd overhead drill design. I used an arbor press to remove the shaft from a 3700kv 1404 brushless motor, and replaced it with a 2mm drill bit. I experimented with a bunch of different drill bit types, including regular HSS jobber bits and brad point bits, but eventually landed on a carbide spotting point bit as this seemed most effective for the job in testing. I secured it by dremelling a groove around the drill bit on the stator end for a C-Clip to sit in, and with a dab of green loctite on the rotor end. The motor is once again powered by a BBB ant weapon esc, and the arms were swapped from TPU to 2mm polycarb, then finally 3mm Carbon Fibre to add rigidity. The dustpan was also done away with, replaced with yet more 2mm hardox forks!

With all this done, the robot was renamed Auger The Top (An auger is a type of seed drill) and has become a lot of fun to run! It’s probably my most competitive antweight at the moment, placing 2nd at AWS 69, 2nd at Botfest 5 and 3rd at Botfest 6. It’s managed to snipe quite a few electronics with the drill too, ranging from wires and motors to escs and even a battery!
LumberThwack
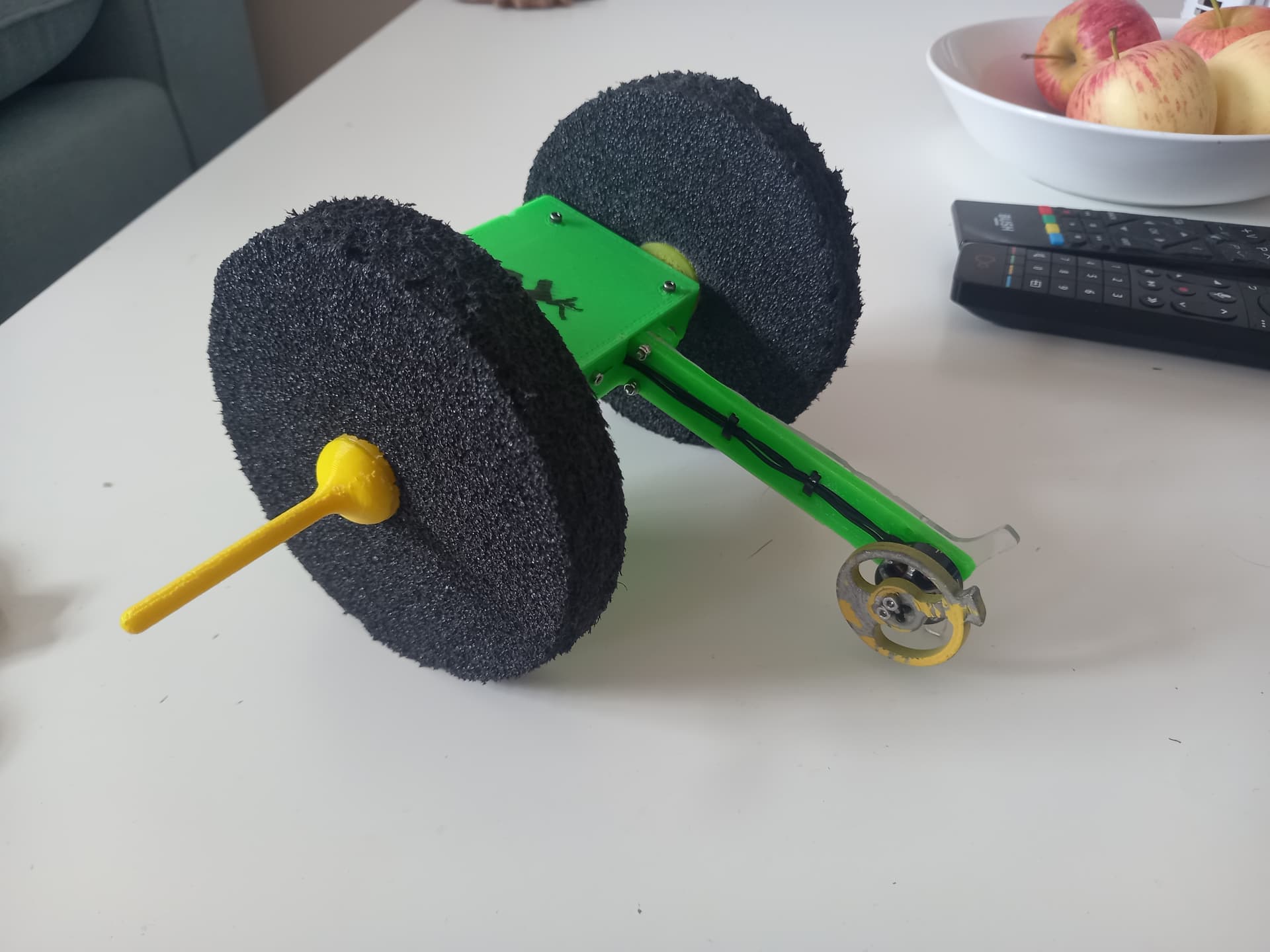
And now for something completely different! All of my ants up to this point had been compliant with the 4 inch cube size limit laid out in the AWS rules, but I wanted to move onto bigger tings. I’d been wanting to do some kind of big wheel design, and settled on the Starchild-style Kinetic Thwacker bot. The body is once again TPU with a PLA+ lid, with the thwacking arm braced by a piece of 2mm polycarbonate. The wheels are 20mm polyethylene foam, and for the internals it’s once again a Malenki, 200mah 2S lipo, 2xN10s (this time the 300rpm model), a BBB ant weapon ESC and 3700kv 1404 brushless motor. The weapon disc is 3mm titanium, with a 40mm diameter weighing a poxy 6 grams. I don’t run this robot all that much either given how often it hits the floor, which can get expensive for EOs. That being said it’s a lot of fun being able to drive straight over opponents, and though accurate thwacks are difficult to execute pulling one off feels amazing. Overall this was a very fun first foray outside of the cube, and sums up why ants are such a great class to experiment in.
Crop Buster

Speaking of experimentation, one of the locomotion types that intrigued me was bristle drive. The concept behind bristle drive is very cool, basically instead of wheels the bot contacts the ground through a series of angled bristles. When these bristles vibrate, the robot begins to slowly move in this direction. The vibration is caused by a spinning weapon, deliberately made slightly off-balance to create stronger vibrations. To turn, the robot throttles the spinner up or down, relying on the torque of the motor to turn left or right respectively. It can’t go backwards, but that’s a small price to pay for ditching those lame wheels. Also, because it’s not got wheels it gets a 50% weight bonus, between that and the drive system and weapon being the same thing, it’s the perfect way to pour buckets of weight into an absolutely silly weapon. The first version of Crop Buster ran a 62g bar and 69g disc, 90mm in diameter. It used a 3S 250mah lipo and high voltage version of the Malenki. A BBB ant weapon esc and 2604 1650kv brushless motor powered the weapon. In terms of silhouette it was very tombclone-esque, and was made of 2 sandwiched layers of 3mm polycarbonate with a TPU body and feet. It suffered however from not moving very well in an actual arena, and having massive stability issues when spun up. I had to limit the throttle to 50% to make it actually controllable, completely defeating the point of making it 3S, and even then it launched itself out of the arena more often than not.
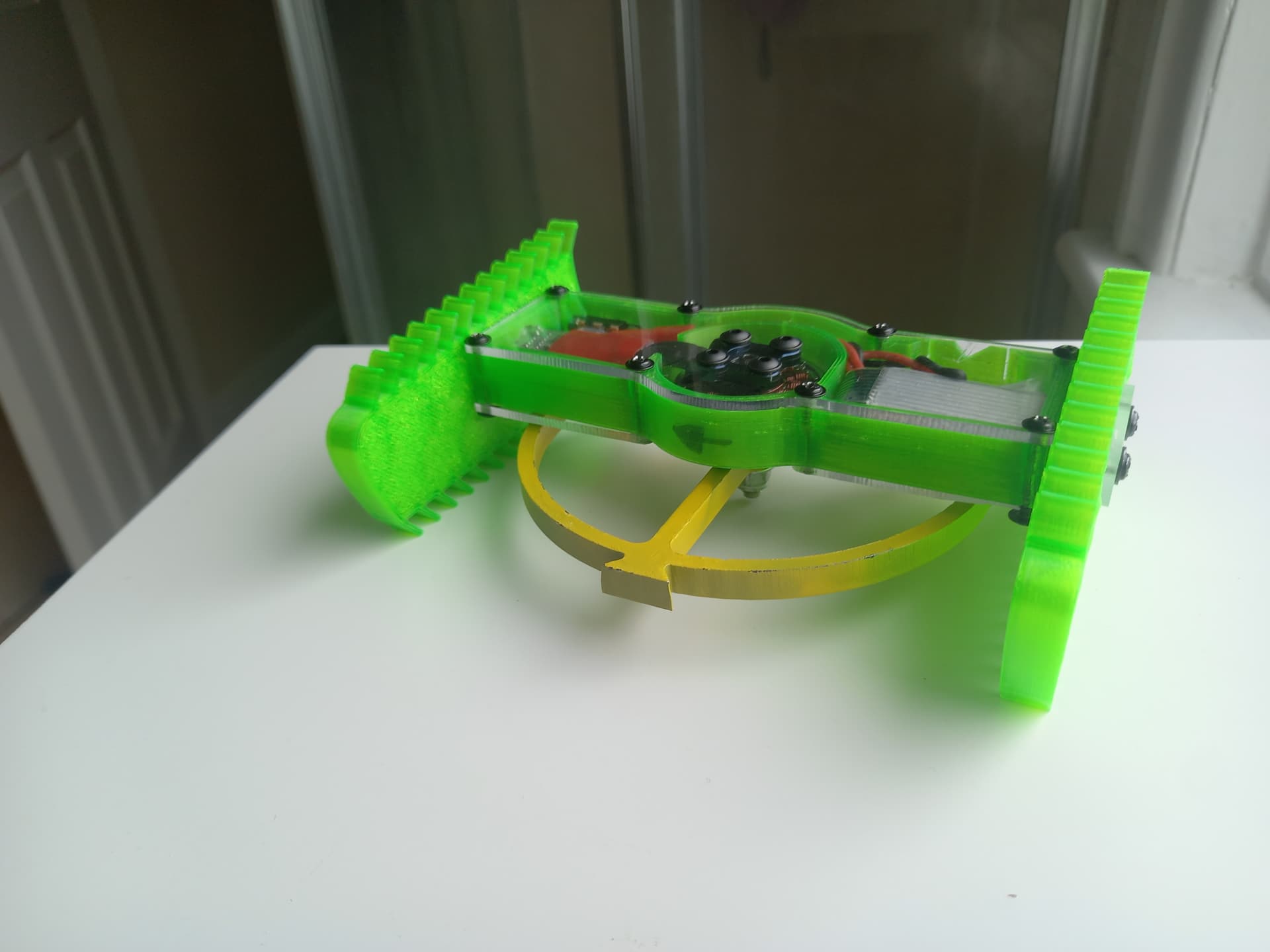
Clearly changes were needed, and after seeing Luke Quin’s incredible bristle ant “The Implication” I was inspired to redesign mine in this style. This meant dropping to a 2S 250mah battery for the sake of flatness, and redesigning and printing the frame like you see here. The lid and base are now 2mm polycarbonate, and with the weight this freed up I upped the weapon to a frankly stupid 110mm 82g disc. Crop Buster is now a lot more stable, and though it still loses most fights due to the very pit-heavy meta in most ant arenas, it moves quite well (if very slowly) under its own power and is actually very driveable. I’m really happy with how it’s performing, the huge (for ants) 158 Joules of stored energy in the disc can produce some absolutely bizarre physics and it generally makes for very entertaining fights. The weapon can struggle to bite unless something is driving into it due to its own slow movement speed, but that’s well worth it to be such a scary, drivable arena hazard!
Thanks for reading my wafflings, I’ll post any major changes or new robots I make in here too but for now, this is the gang!
