I thought to start a build log for my 150g in progress bot, What The Duck(ling). It is a overhead drill cam lifter with interchangeable weapons including, but not limited to, an axe, flipper, and grabber.
It was mainly inspired by Auger The Top and The Power Of Friendship. I wanted to finally make a damaging bot and this was my solution. I also wanted the abilities of a cam lifter.
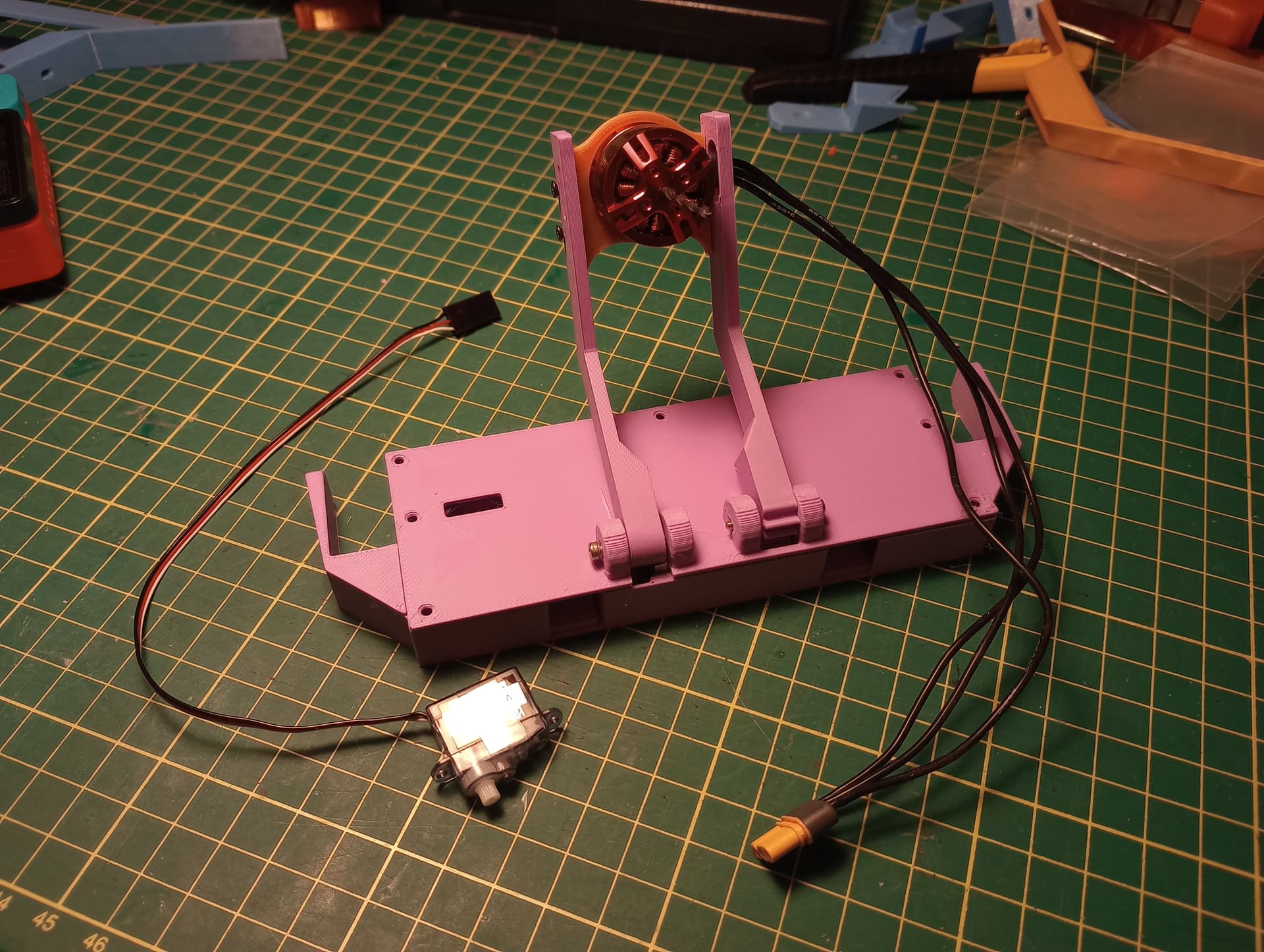
It’s currently in the prototyping phase with some rough chassis printed and the mechnisms somewhat figured out. For the drill bit I replaced the shaft of an 1806 motor. I also had to massively downsize the servos used for the forks compared to my previous cam lifter, Guido. For driving the arm I’m using a prototype M10 from Ranglebox which should be lighter but just as strong.
Great looking design! A drill can be suprisingly effective at 150g.
I’m a little dubious of that small all plastic servo though, I think its likely to strip teeth in the harsh life of a combat robot. Perhaps you can strip some weight out of the frame and upgrade it?
I’m hopeful about the servo as a cam lifter requires very little torque and I shouldn’t reach their stall torque. I would only be worried about a direct hit from verts (I’ll have arour for horizontals but not much I can do for verts). I’ve ordered some BECs from BBB so I should be able to test today.
Hello, it’s been a while but I’m back with a progress update!
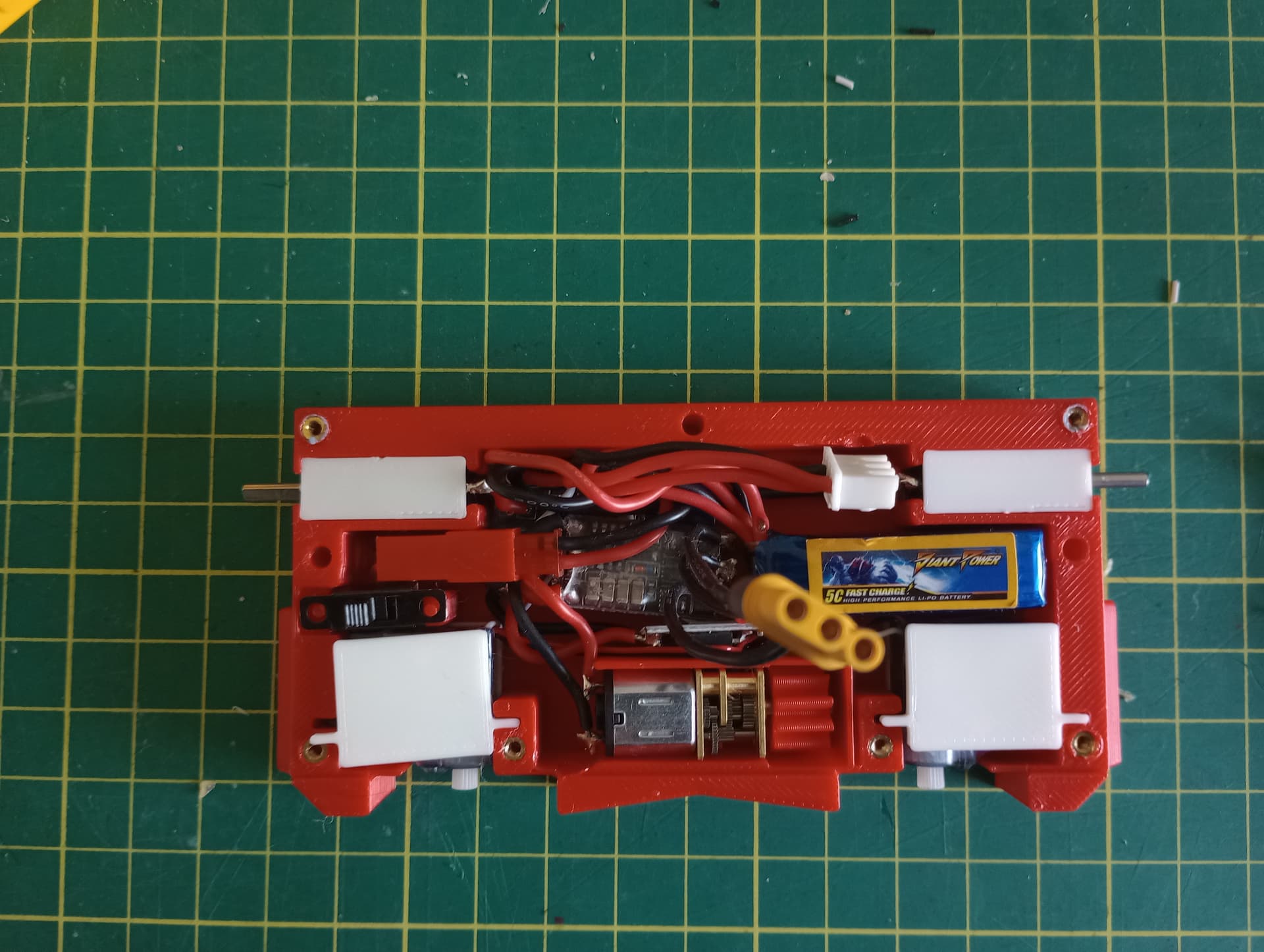
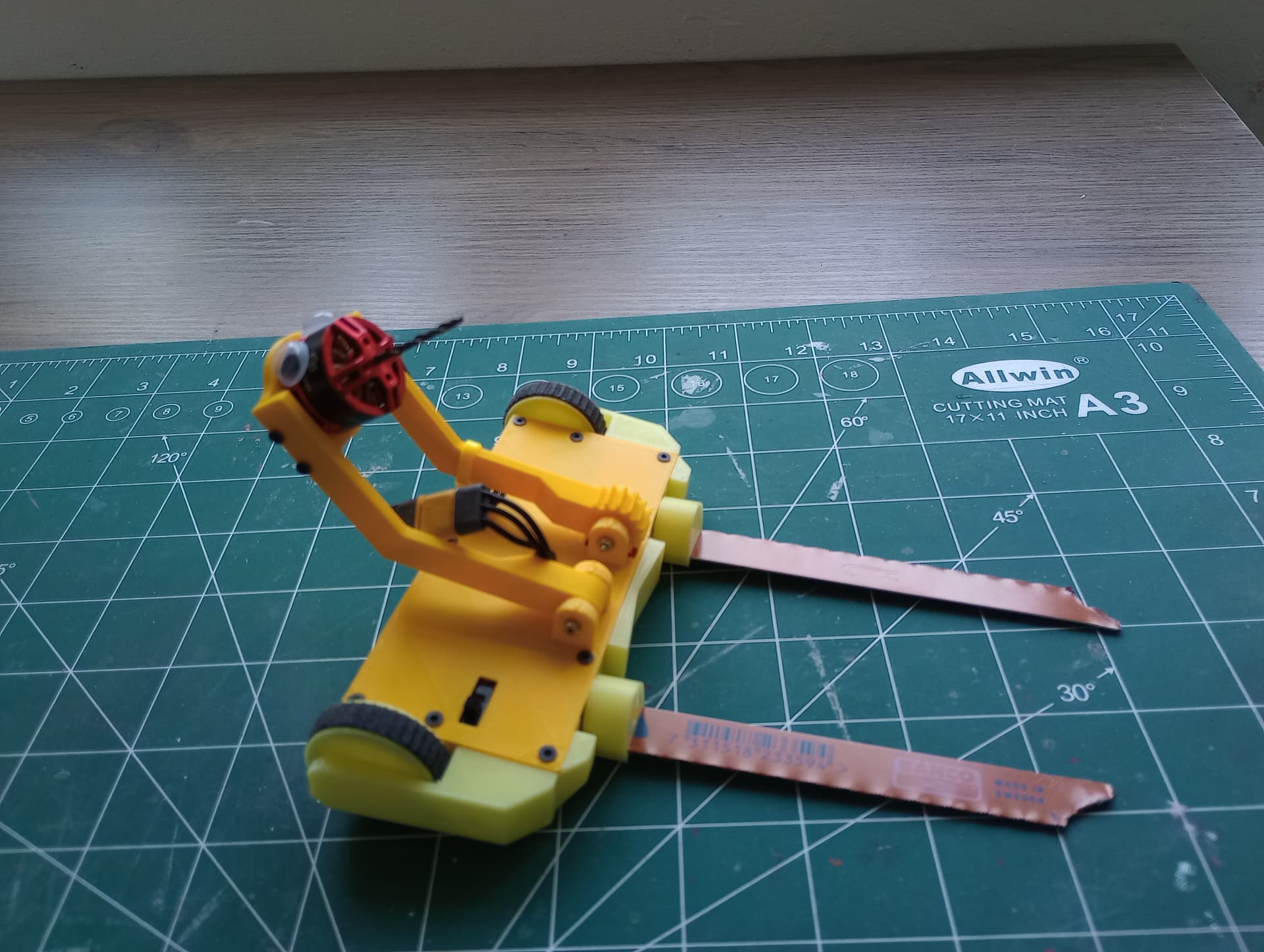
I have all the components now and I have a few changes to the internals, most notably:
I’m now using the M10s for drive and a 100rpm N10 for the arm
I’ve switched to a more modern and compact chassis
And a higher gear ratio for the arm.
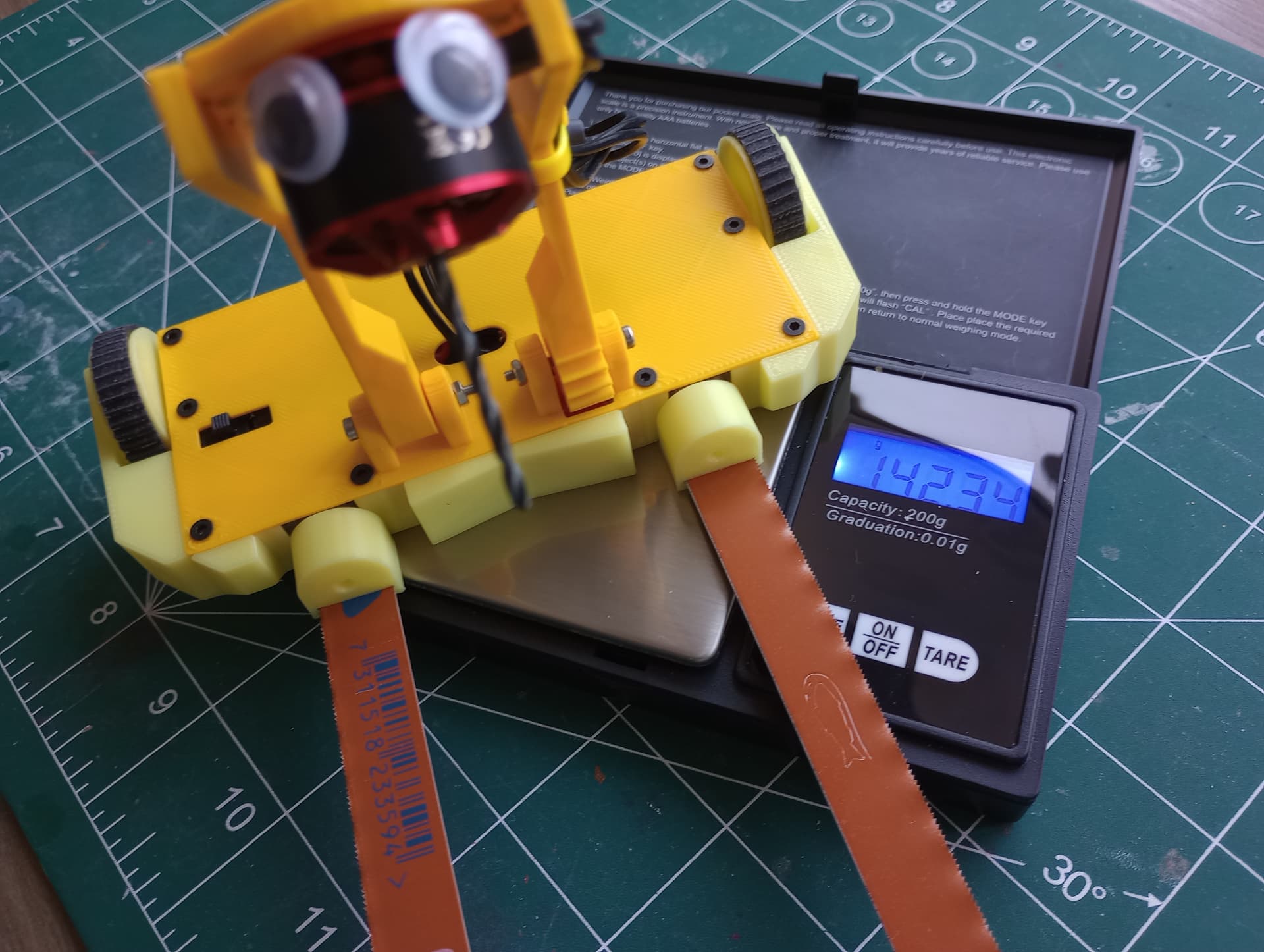
I’ve got some things to tweak and I have to sharpen the forks. I originally thought that it was going to be overweight and I had ordered a 1404 motor instead of the 1806 I’m using now to save weight but this isn’t going to be necessary as it’s currently 142g!
Sorry about the long wait but I just remembered that this post exists…
Anyway, I took What to ORCS 8 and went 2 wins to 3 losses, not too good. However, I learnt lessons and found issues.
The issues:
The gears were skipping when I tried to pull the drill out
The forks would slip on the servos
Too much weight left over.
The fixes:
I… Don’t know yet. I need to think about this but probably higher MOD
Fixing problems 2 and 3, I am going to replace the light, plastic geared servos with heavier, metal geared servos wich are more durable and won’t let the forks slip.
With these changes, I will be taking What to ORCS 9! Hopefully it does better.