So back in August 2022 after a long break from Beetles (the less spoken about “The Apprentice” the better) and a year break from Robots in general, Sam Price convinced me to build the stupid thing I had been working on in CAD for a little while to get me back into doing events after life stuff happened.
So, I set myself a target to build and enter a robot for the Second Battle in the Burgh, so here we go.
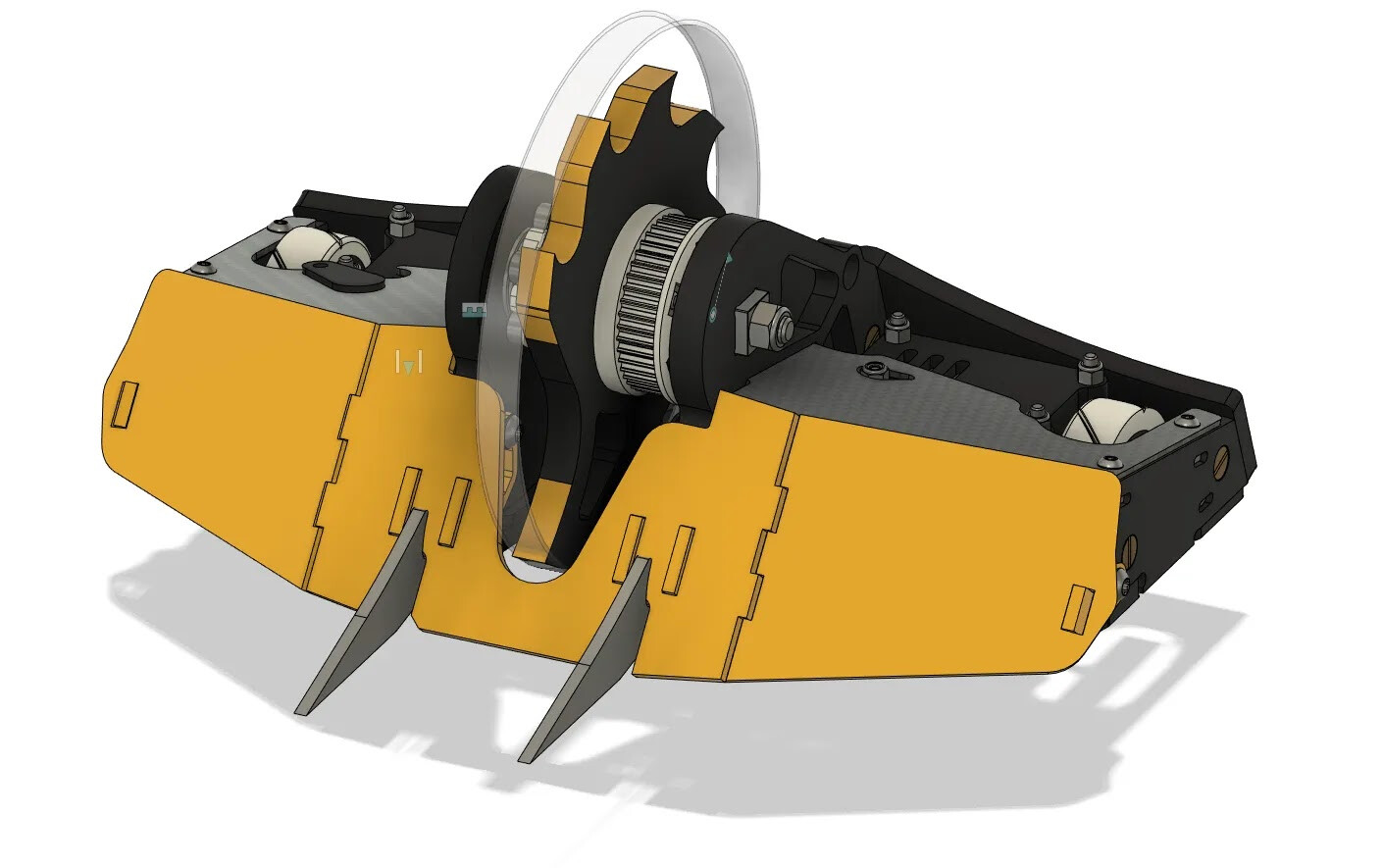
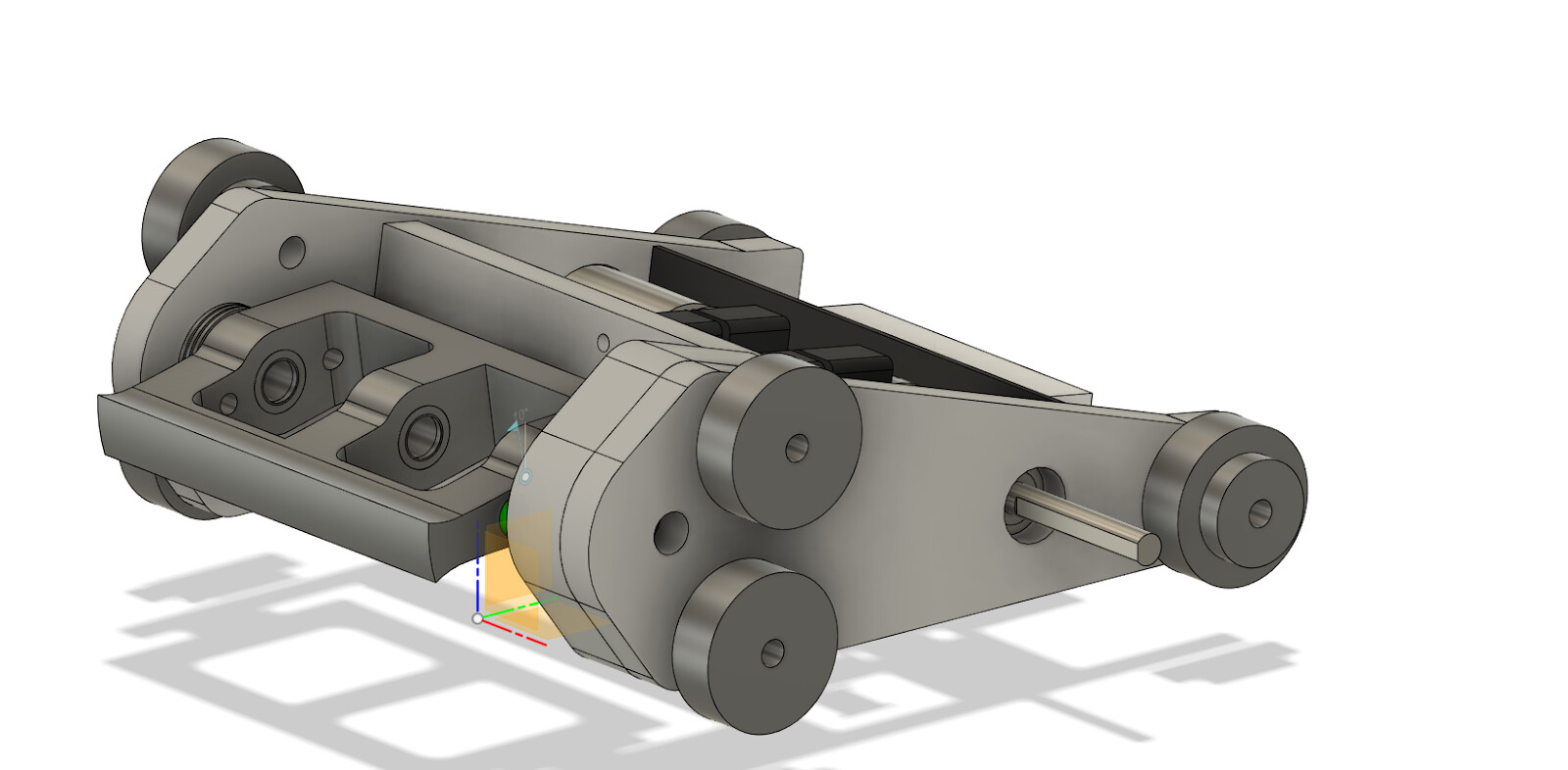
So, the Cad I do not have many images of V1, but I do have a few.
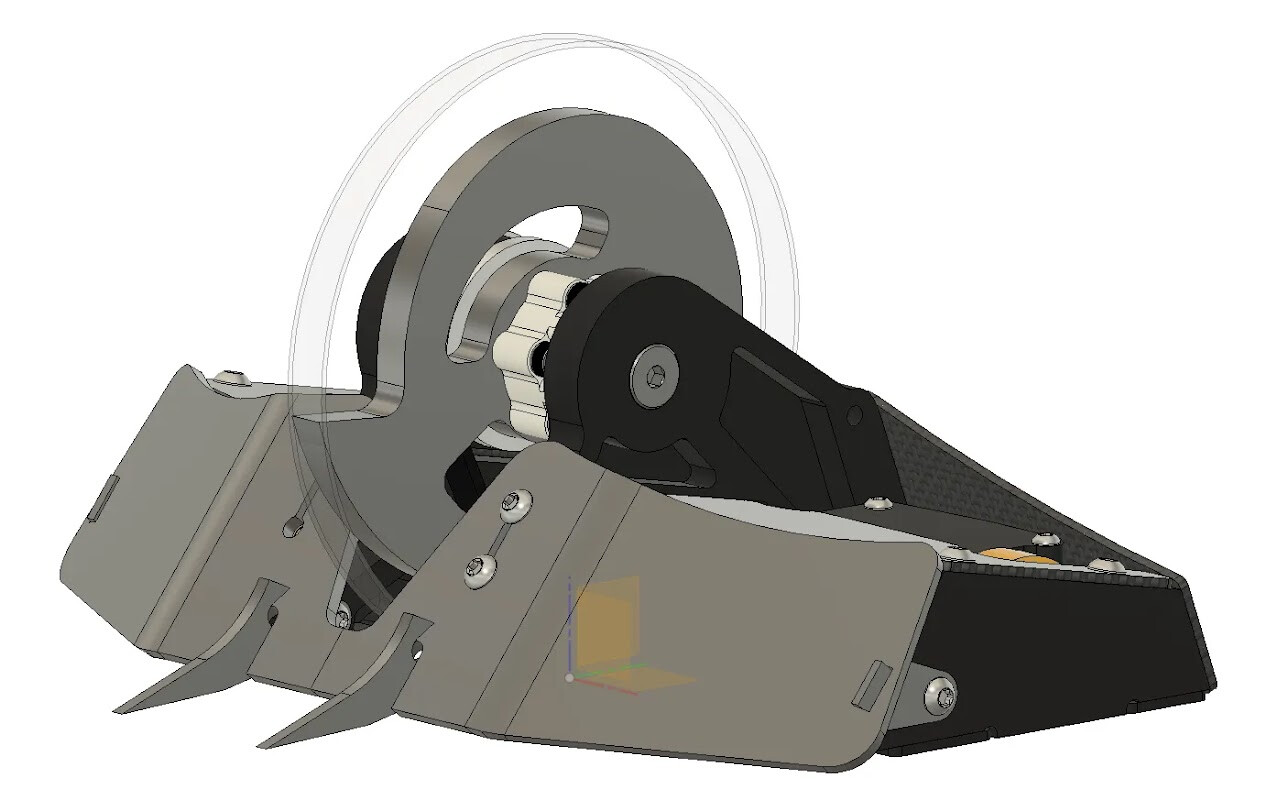
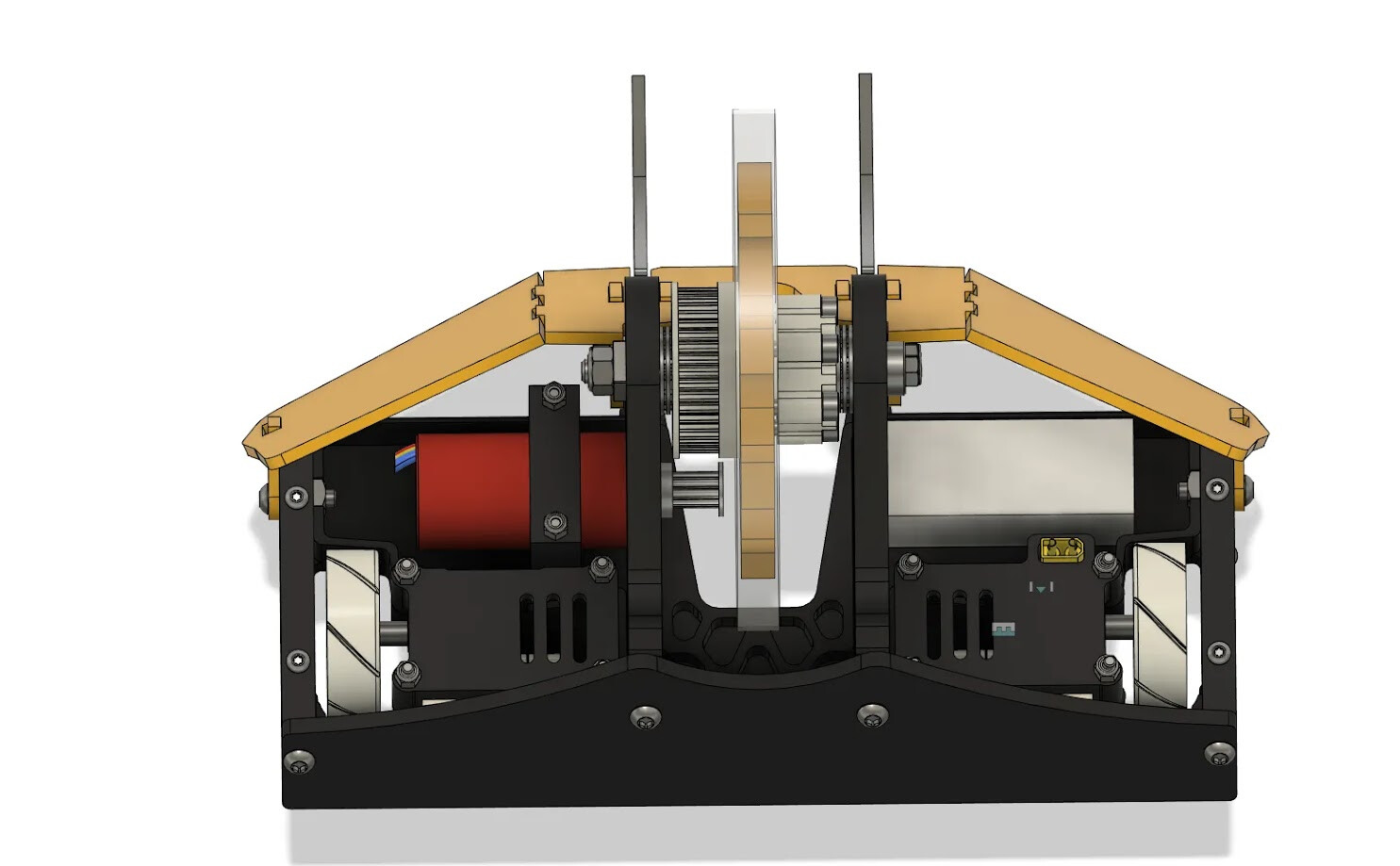
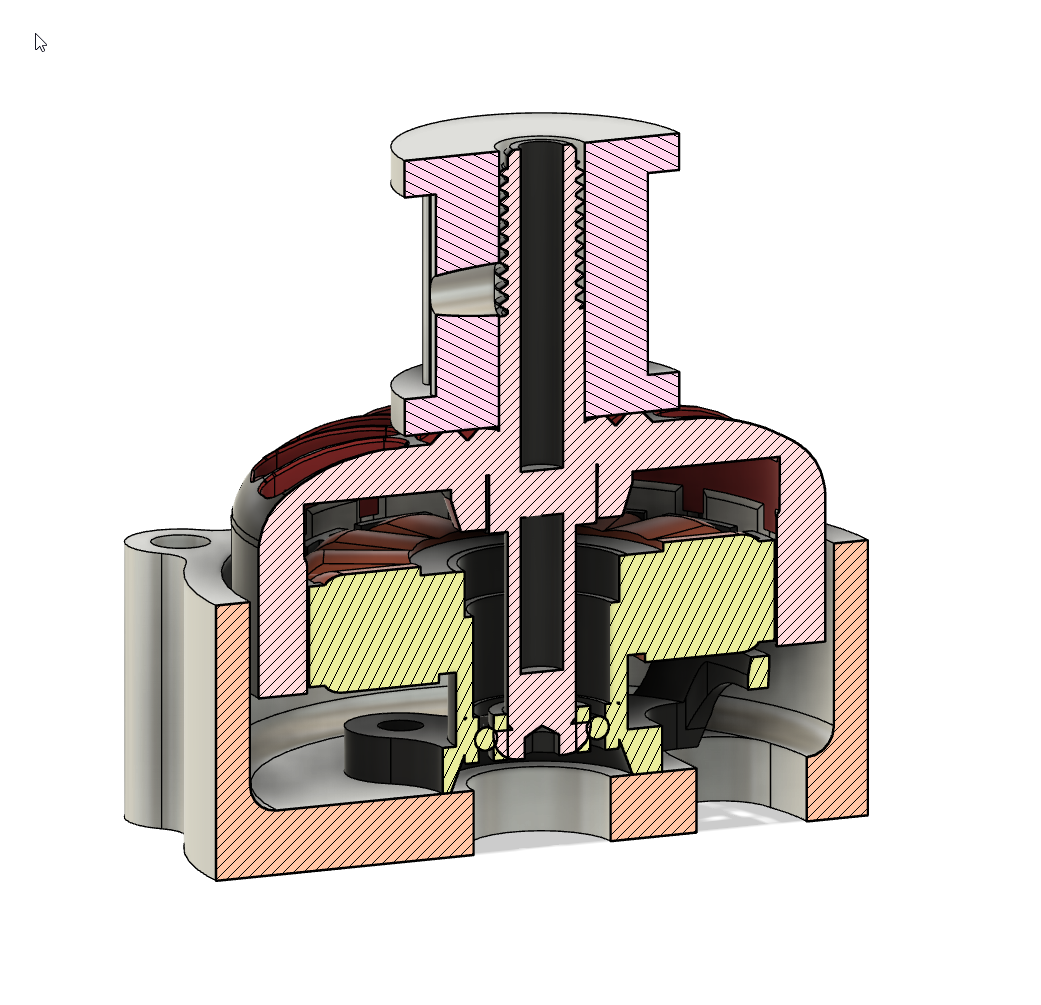
So this is roughly how I planned it to be, took the disc design from Sherkt lineage (I had after some silly Battlebots applications stuff) and modified it as I can’t leave well alone, so I made it more toothy and used the bolt pattern from Gus mega Destructo bar disc thing as that was going to be original weapon system with my own hubs, but I moved away from it as I was going to order some steel anyway for the armour forks etc and I figured I might as well have a proper disc as I wasn’t aiming for the highest of RPMs and having a larger MoI would very useful, It did mean the spacer was designed for a 10mm weapon and I have given it a 8mm disc but nothing some printed shims couldn’t sort out.
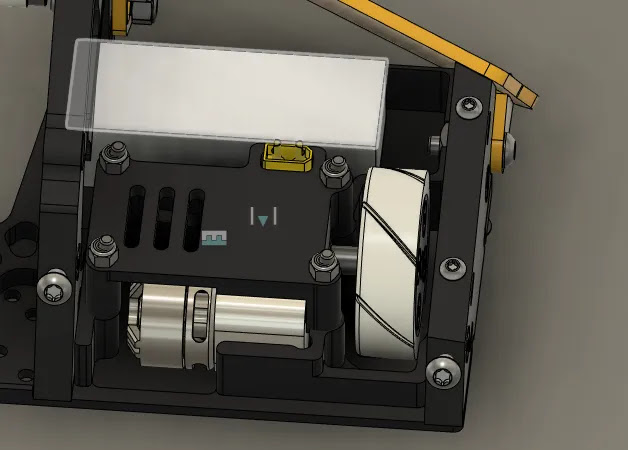
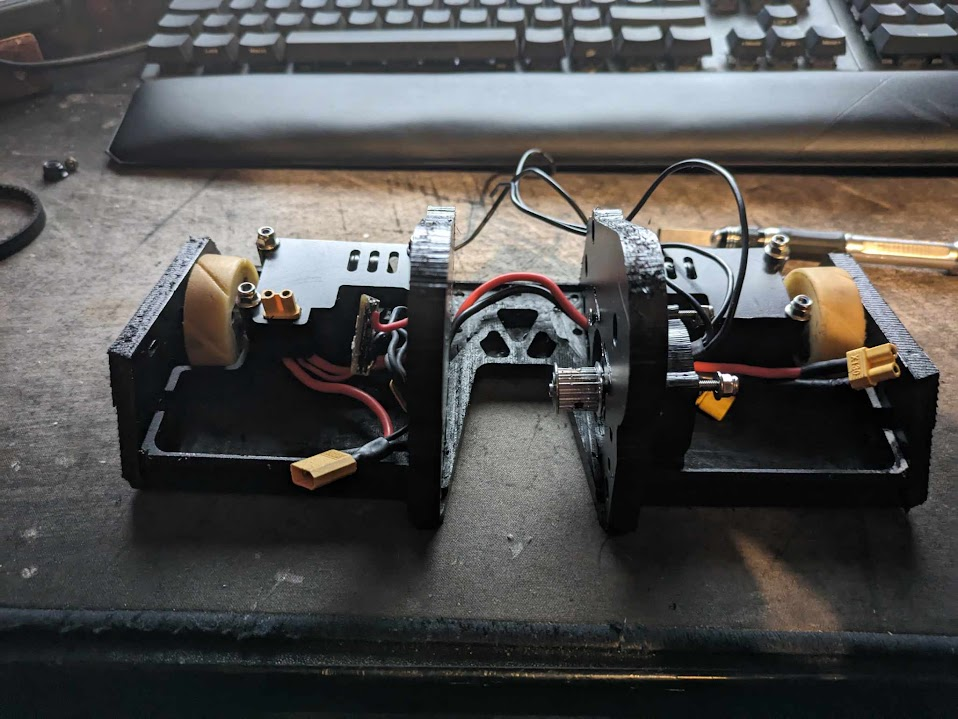
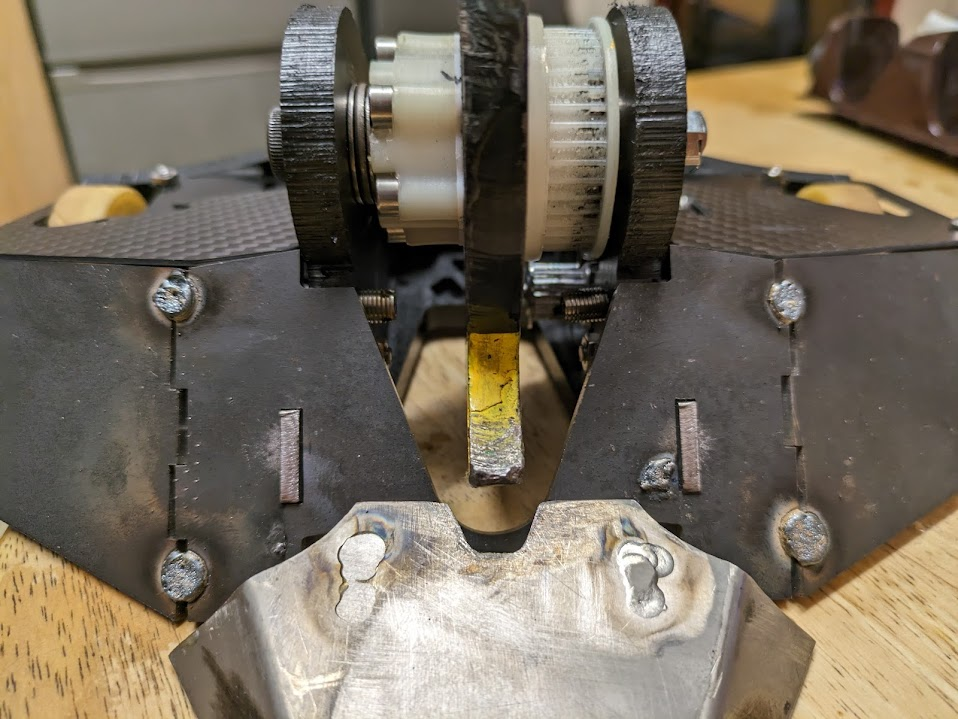
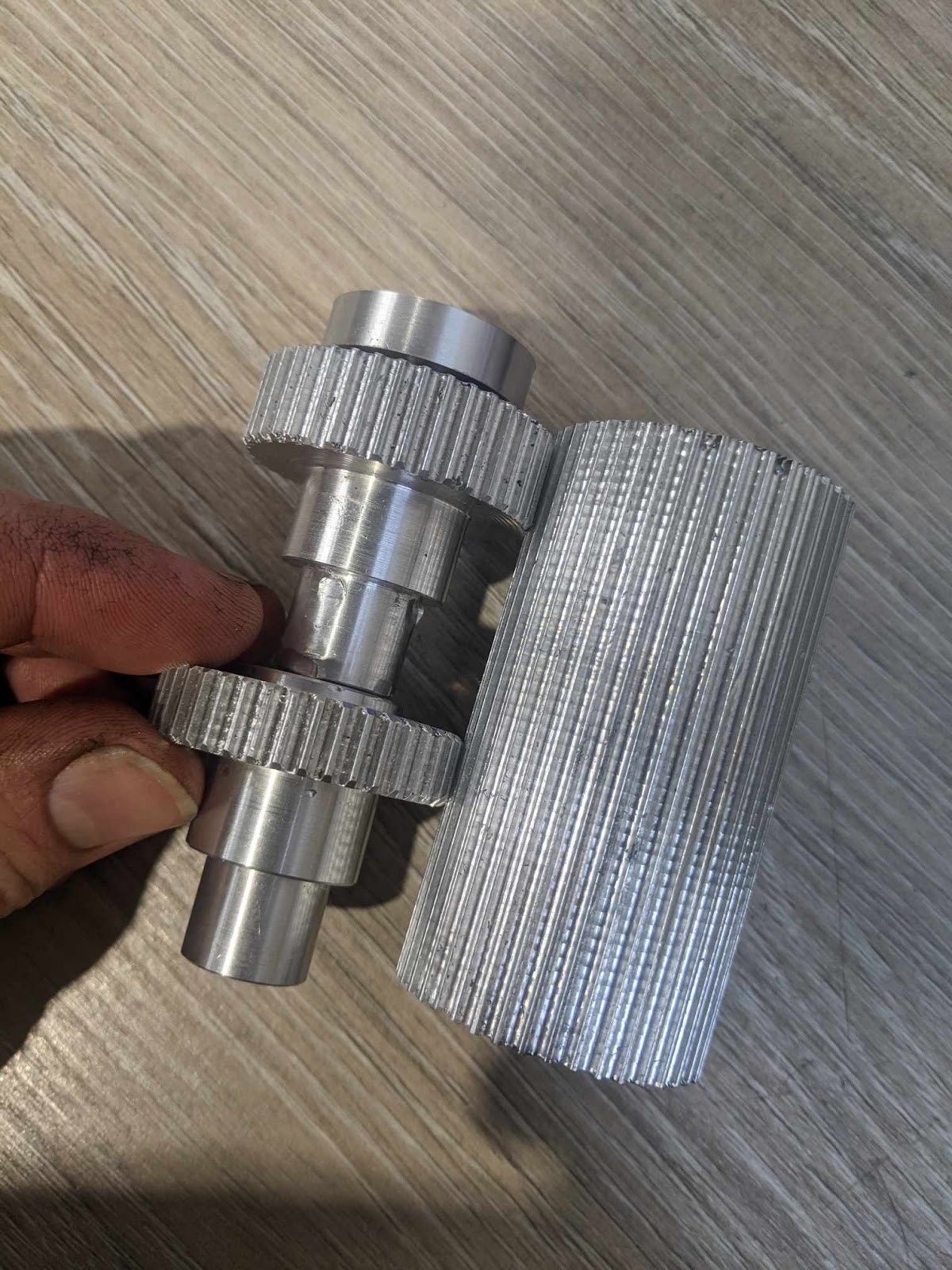
Speaking of the weapon it was using a HTD3 belt with both pulleys being toothed, I did think about using a more traditional tooth motor pulley with a smooth weapon one but after talking with some US builders and seeing how well TPU worked for them I changed to a tooth both sides with the weapon side being TPU.
This also allowed for a good spin-up time and a built-in tooth protector, and with the knowledge that if it was a tad undersized either from printing or design it would grip and load the needle roller bearings, with needle roller thrust bearing between the pulley/spacer and bulkheads.
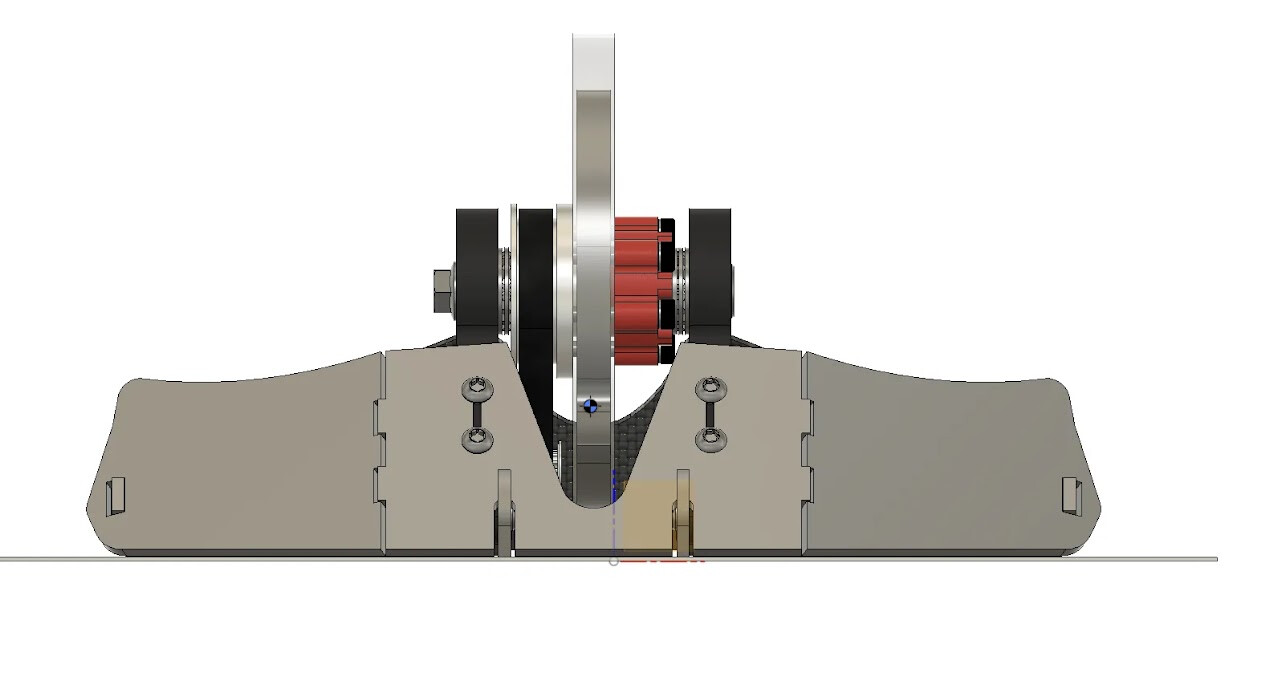
The motor powering it all was an emax2205, now some of you would be thinking “Oh that’s too small it going to struggle” or something along those lines, and with the gearing it ran perfectly fine, there were issues which I will talk about later on but those where due to dumb oversites made by me (you may see one in the image about)
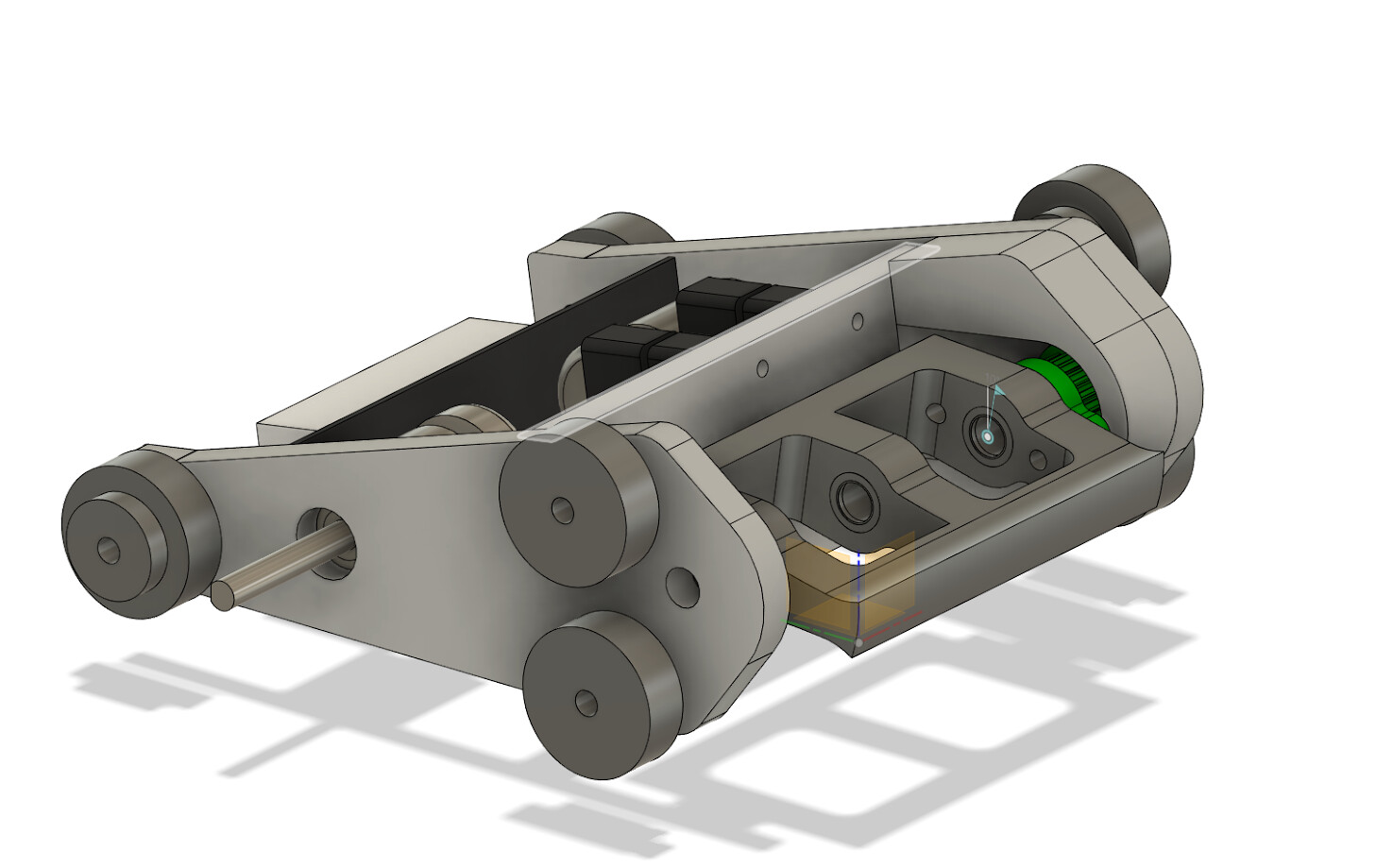
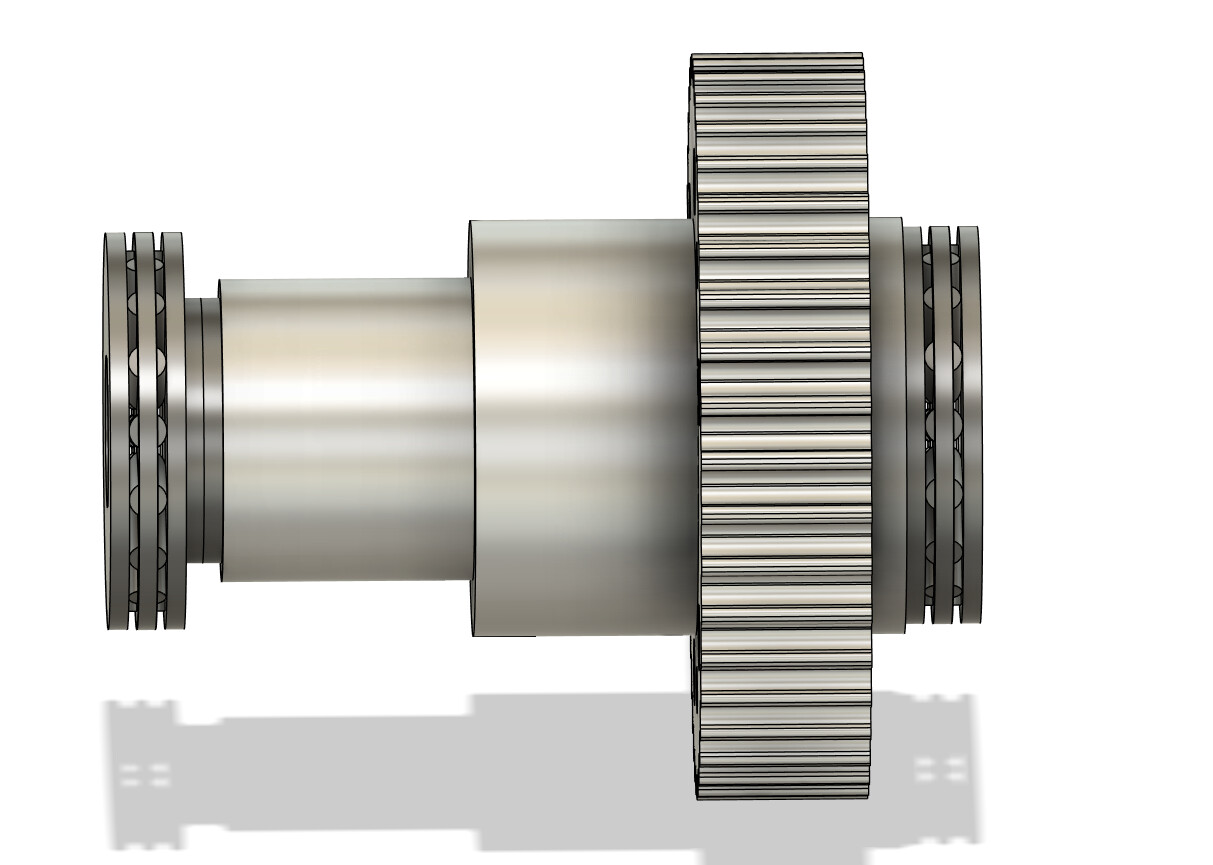
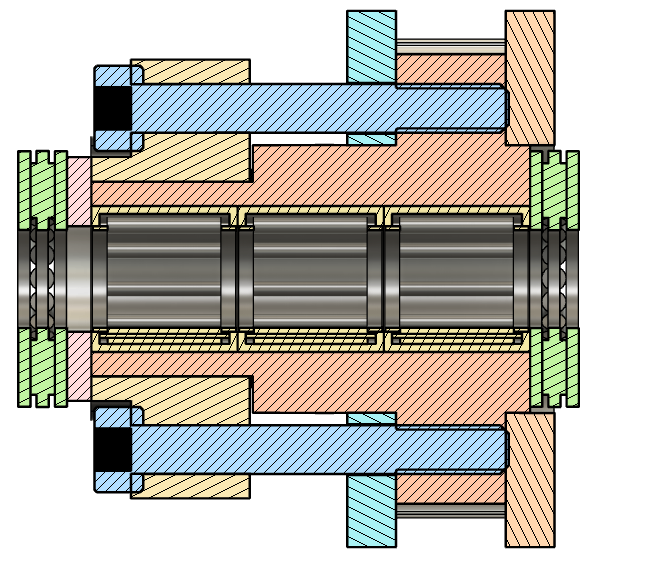
Onto the drive well the drive is both a strong point and a weakness, it uses some Bad Timing Billet gearboxes, of Deadules Fame, I bought this way back when I was planning a new overhead Beetleweight and Cosmin was making some experimental ones after Battle in the Burge 1 and I snapped a pair up.
Now these gearboxes are bulletproof, they took anything Daedalus threw at them with exposed wheels, a 6mm output shaft and using the Pluto drive chain which I can still get spares off (which I should order some) and them being not planetary helps with packaging.
But I cannot get new bodies for them, and they are VERY fast even with the lowest KV 18** motor I can find it still silly fast on the smallest wheels I could get and speaking of them here is another image.
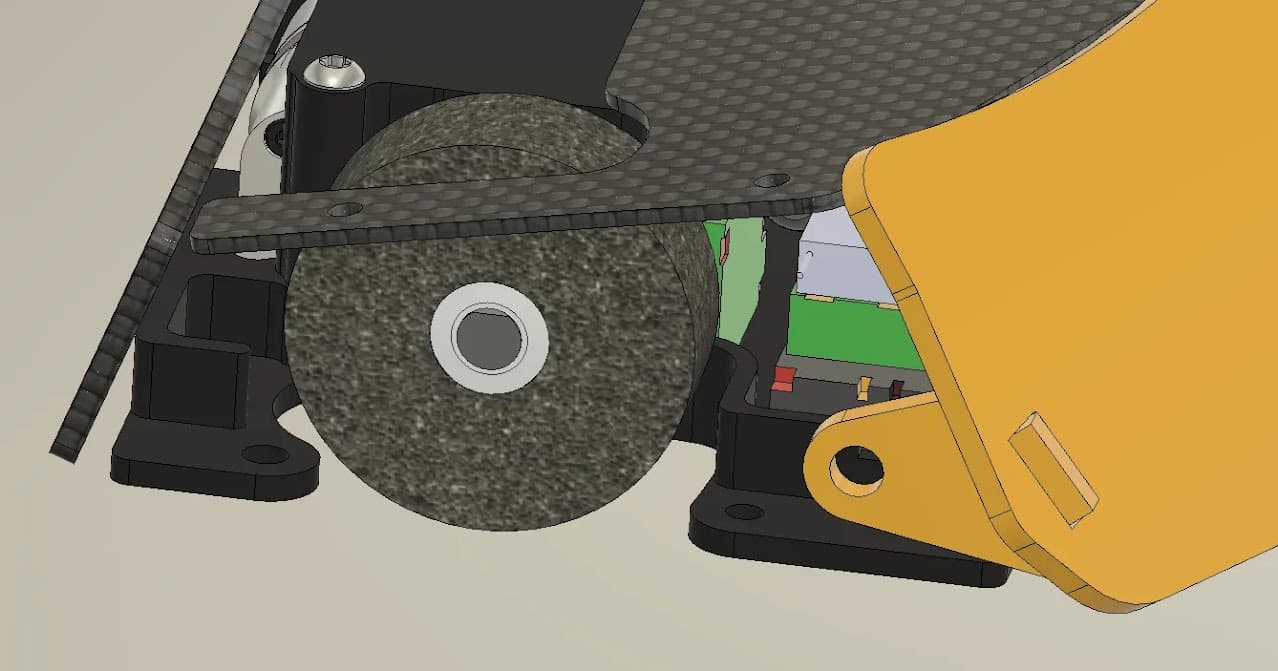
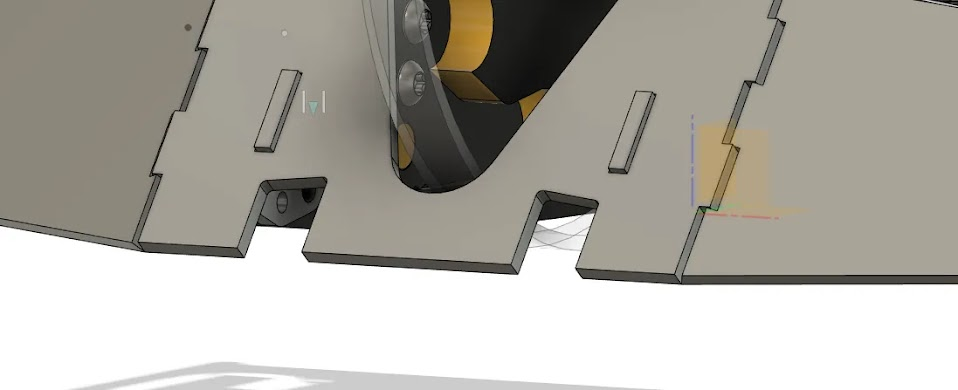
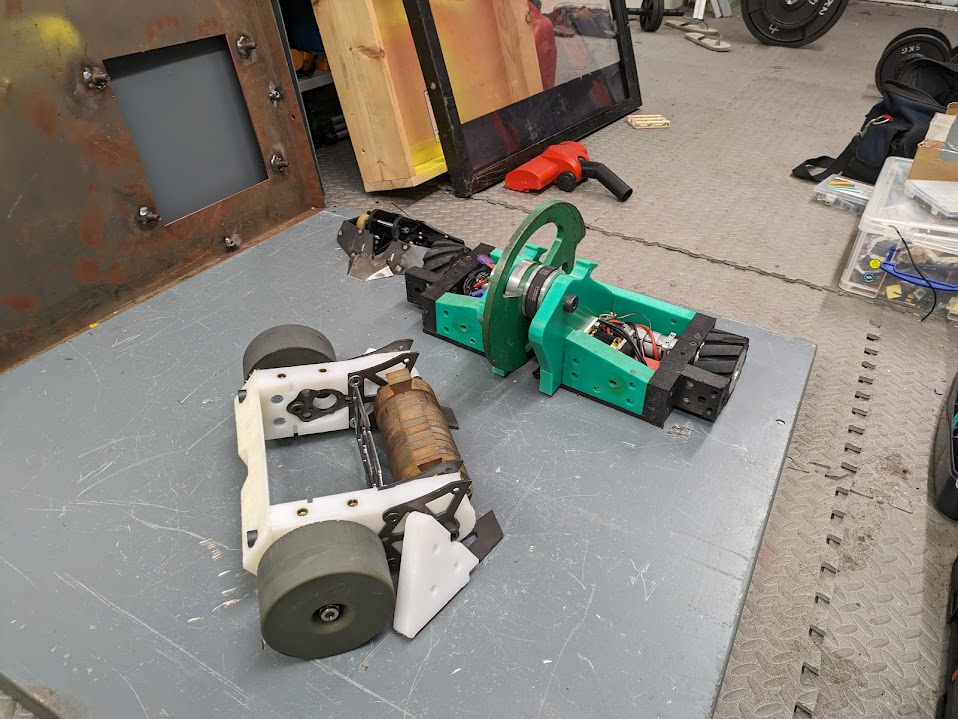
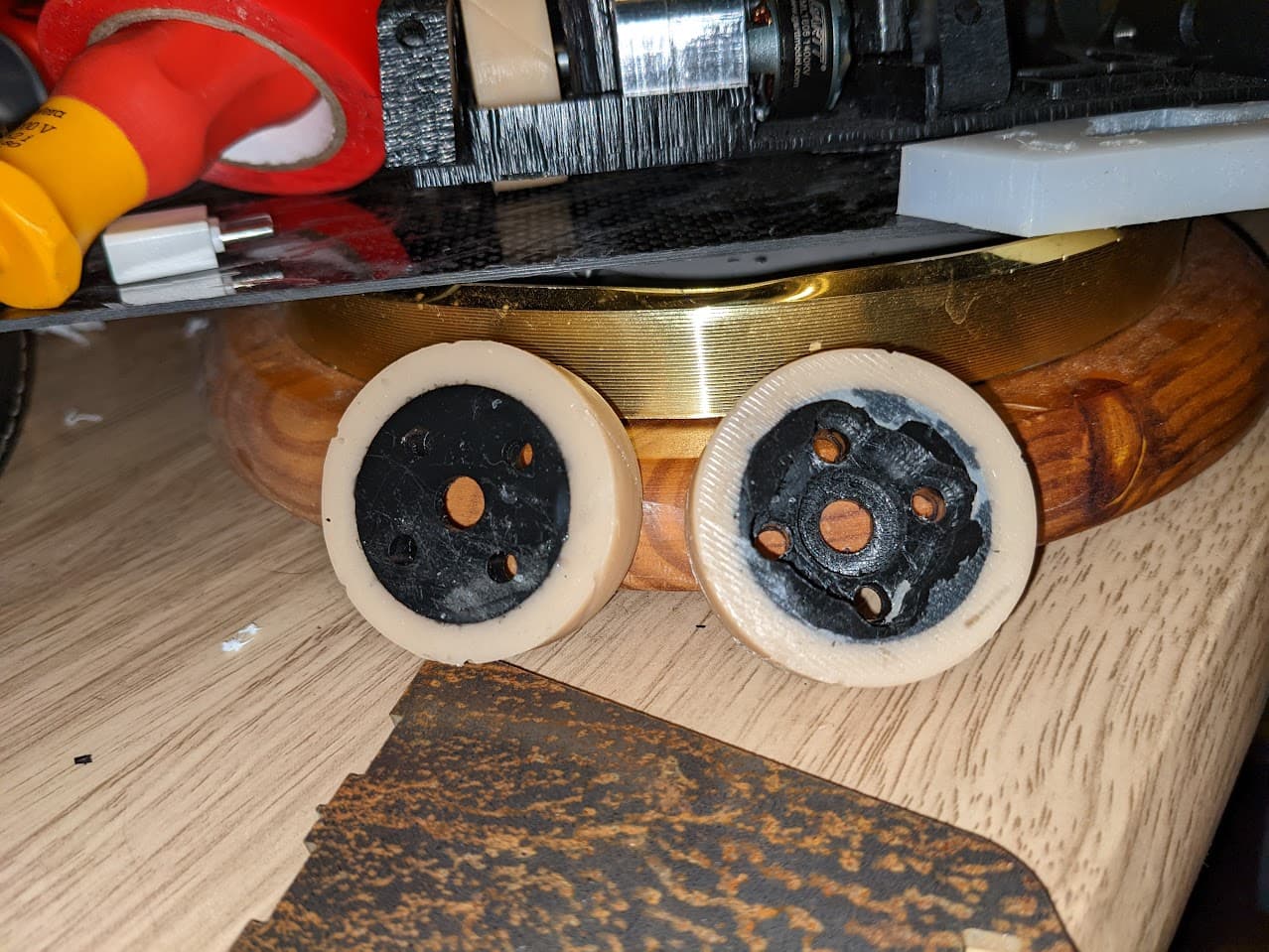
The wheels were a massive pain. I wanted to use Banebots 1 3/8 as I had 8 in total, they are know thing grippy enough and low profile easy, but I couldn’t for love or (reasonable) money get a single wheel width hub, I could find duels but they where too wide and cutting them down would require making the new circlip grove which and at that point, I might as well make custom ones, so I looked at using foams, they have worked great for like bby sherkt and Daedalus but they were simply too large, plus they would need to be Latex ’ed and all there spares.
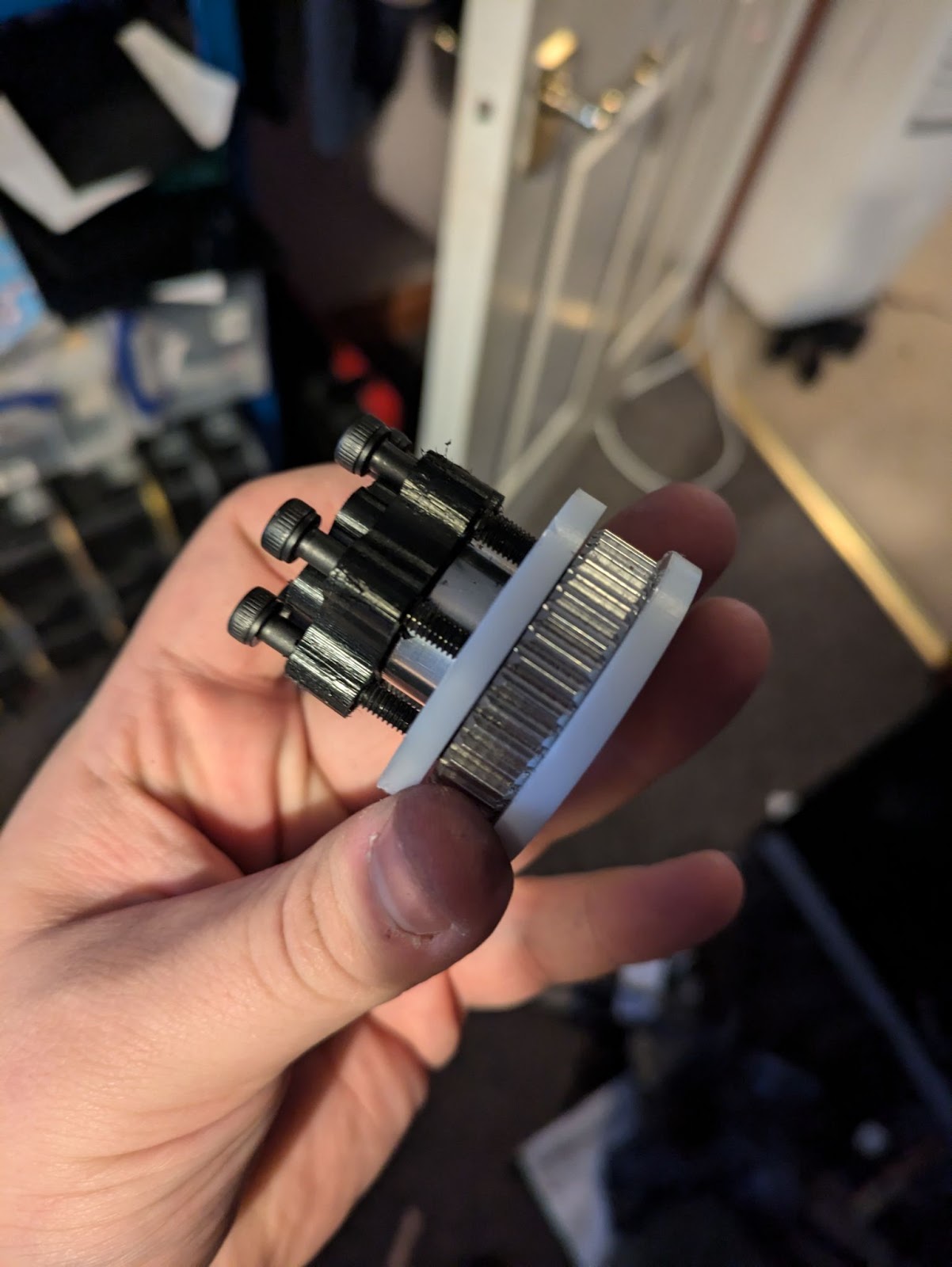
So, in the end, I simply got a pair of Actobotics Set Screw D-Hub,

and made custom wheels, as I had some Vytaflex from my Featherweight silliness that needed to be used up.
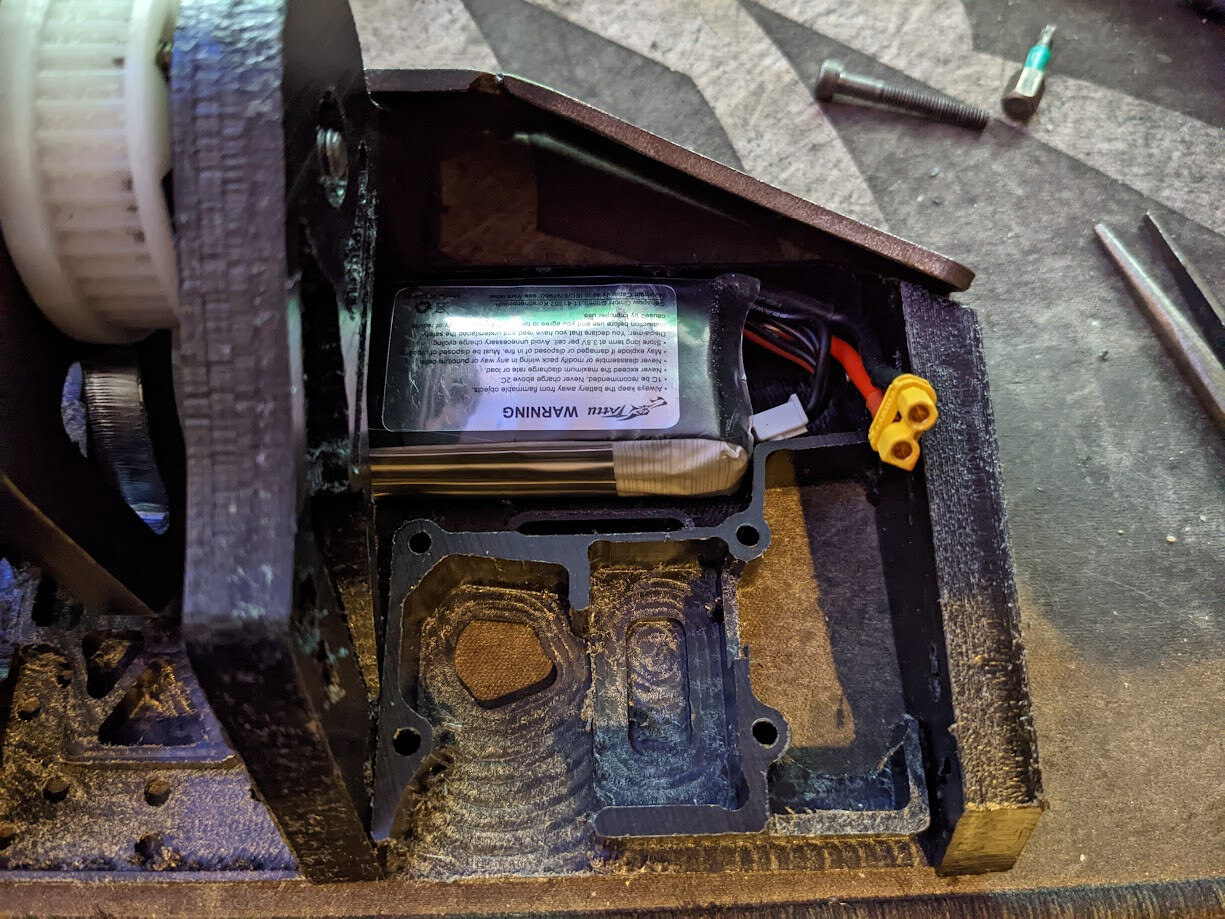
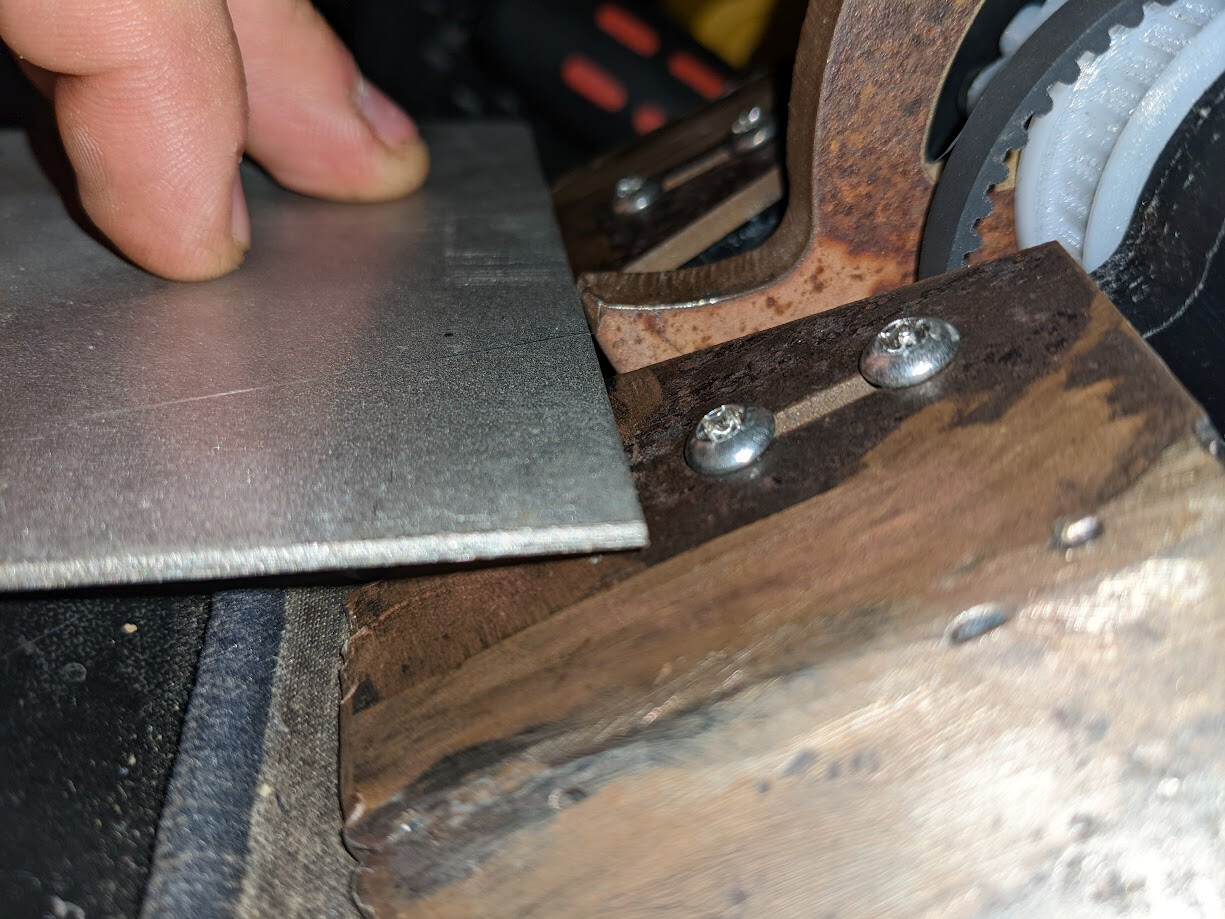
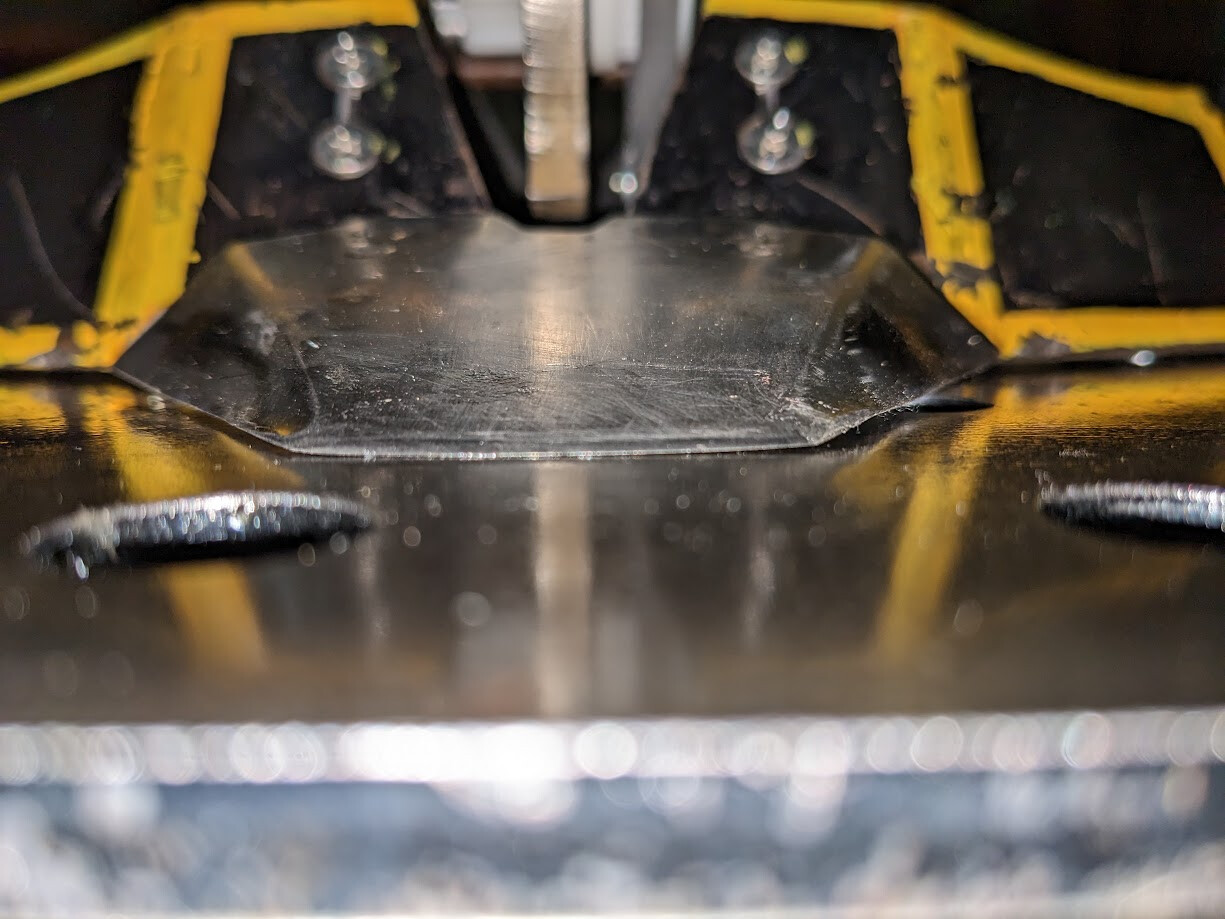
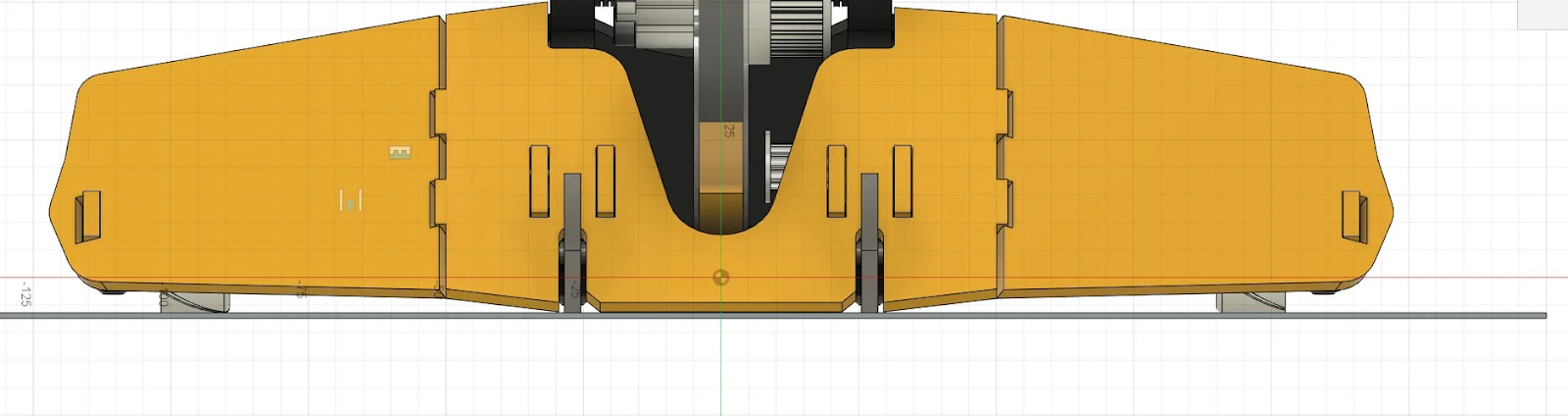
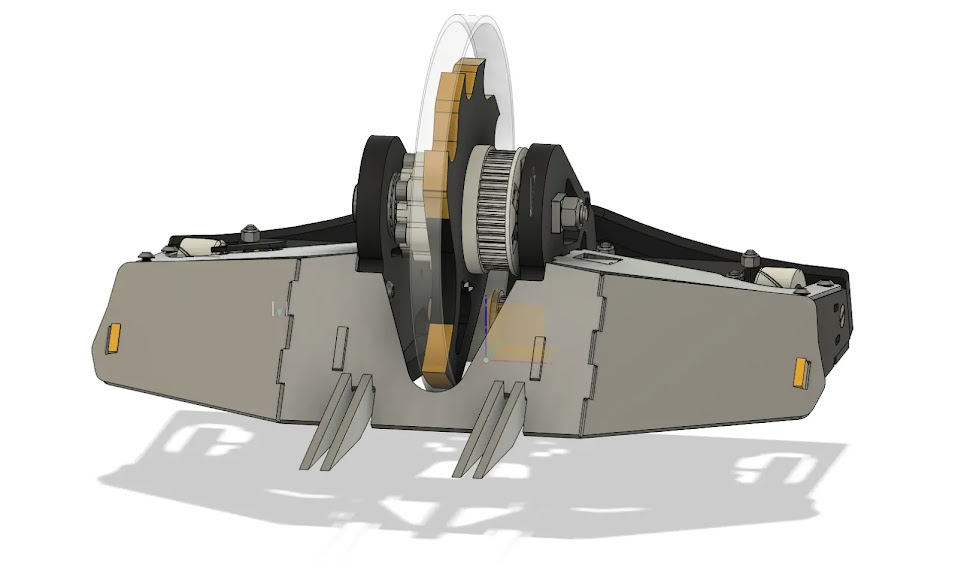
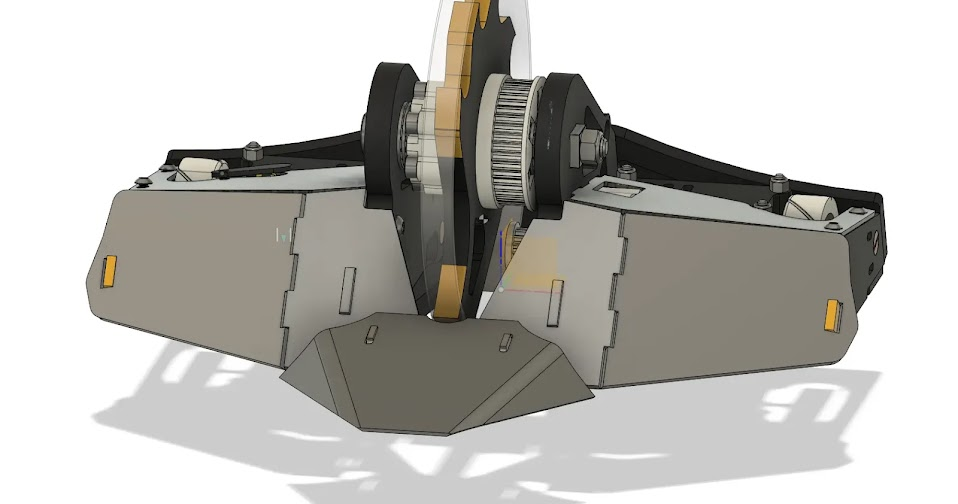
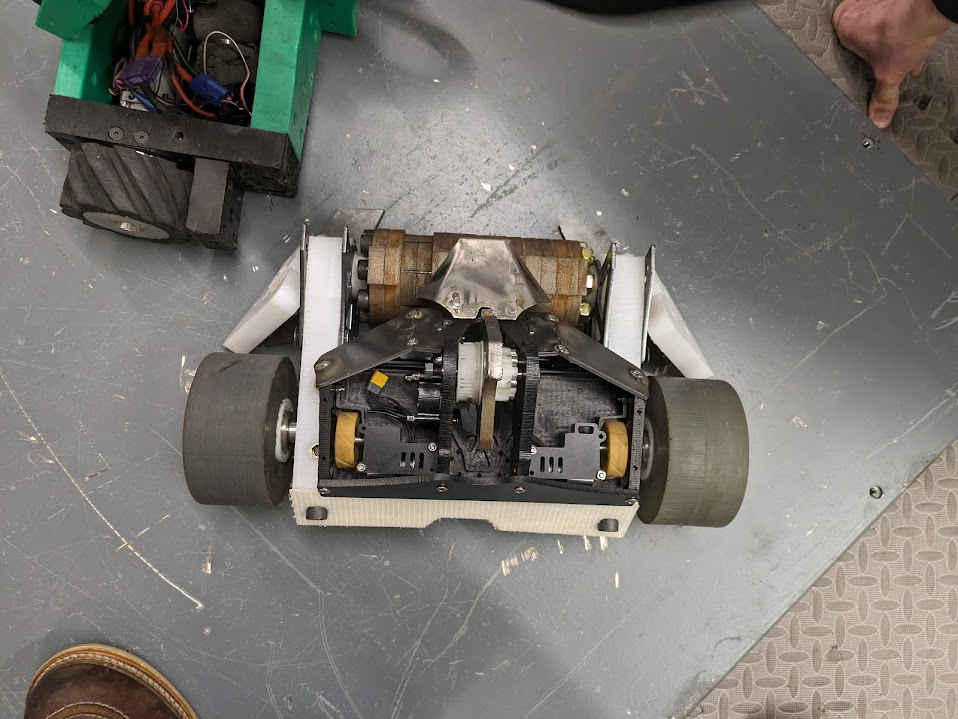
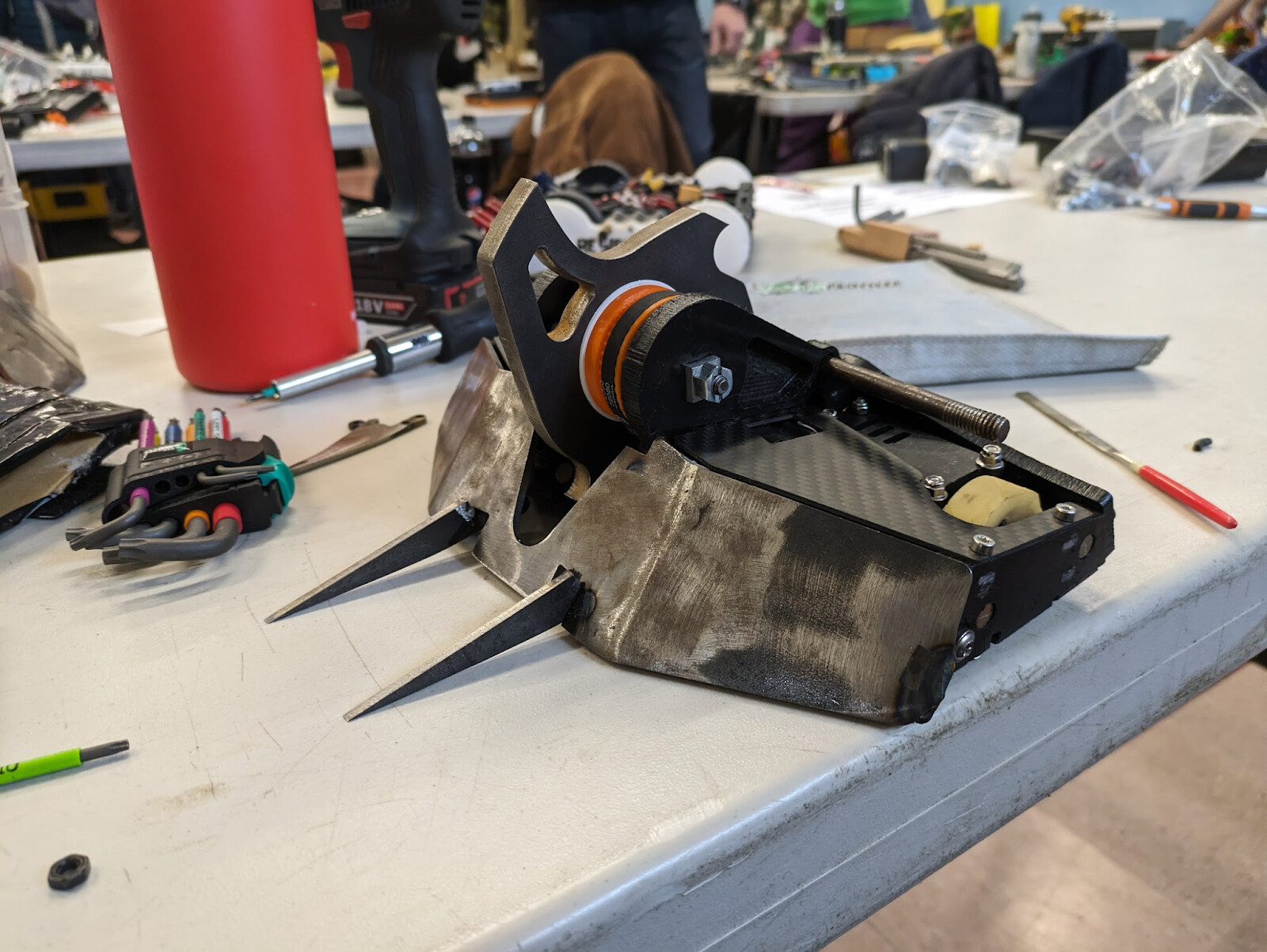
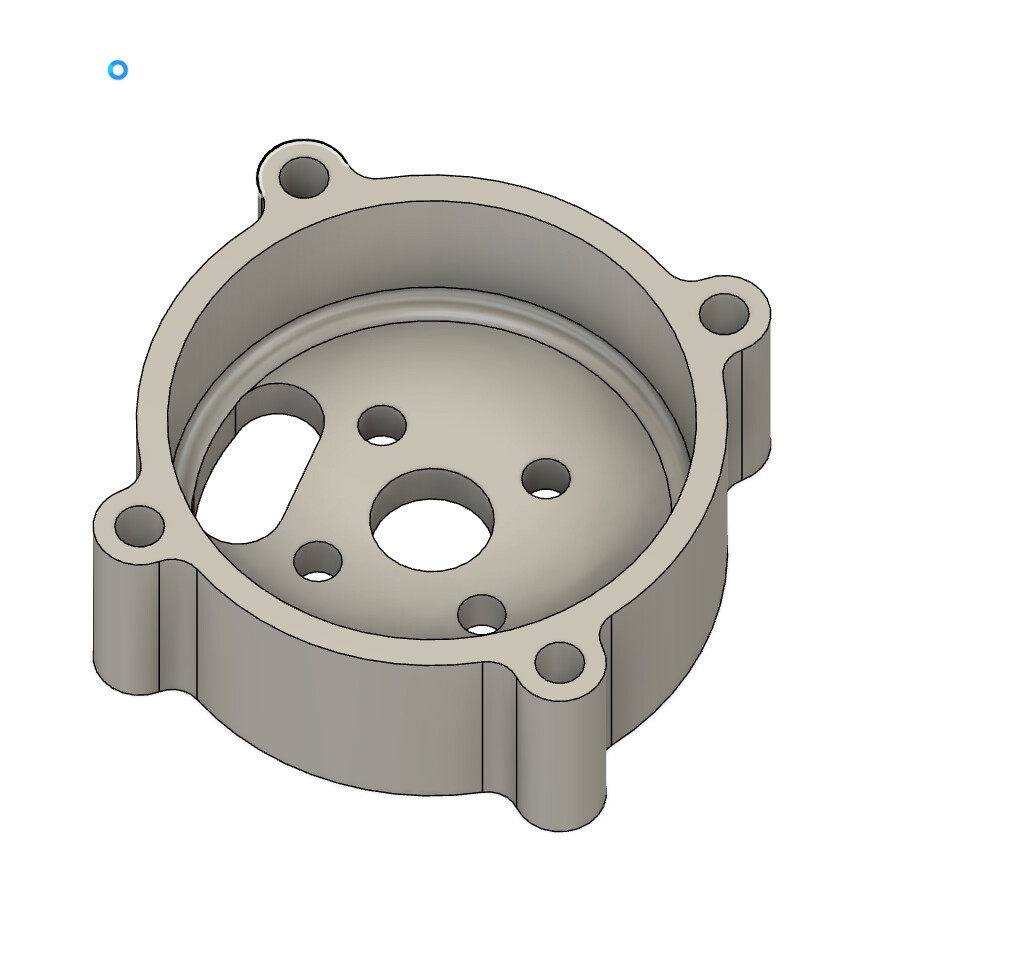
So onto the frame and armour, well as you may have noticed it is themed on a certain robot that may have been seen on TV across the globe, so with that I made the bold choice to get 3mm Hardox armour on to the front of this thing, this would allow me to shape it how wanted, make it basically invulnerable to most weapons going and if it does get slots and chunks removed I can easily patch it with some weld, but this meant I had to compact, there is a little wasted space as possible.
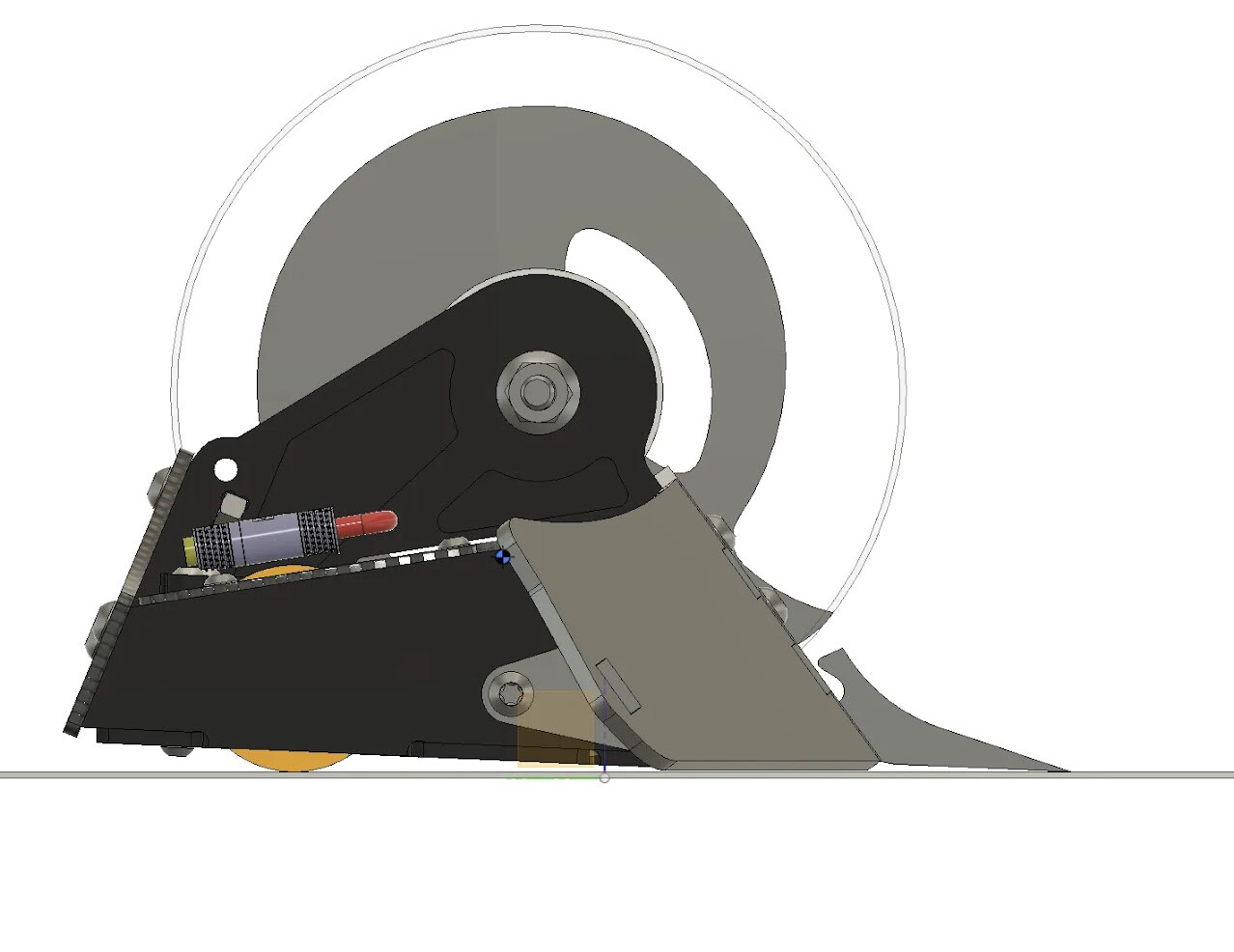
I also used a mixture of Carbon fibre and HDPE. The Sides and weapon uprights are 10mm, the rear is 2.5mm carbon fibre and the lids 1.5mm. I also cut down on the number of fasteners, the lids only had two with the other side tapping into the bulkheads, all the panels were attached using captive nuts which were held in place with high-strength hot glue. (this works better than it has any right to). Mounting the drive is also rather unique as gearboxes do not have any mounting points, so I have to use a clam shell design which makes things a bit harder but doable, just meant doing a heavily machined baseplate which is 10mm It is thickest and 2mm at its thinnest, with the top part being a highly machined 20mm which I had kicking around.
Electronics nothing special, 2 12a afros for drive and a tattoo 52a for the weapon, all things I had from other robots all last now working so I onto the build, Which due to good timing meant i could take it to a Robodojo event before BiTB and get some testing in,
There isn’t much to say here there were a few hiccups which I will share at the end!





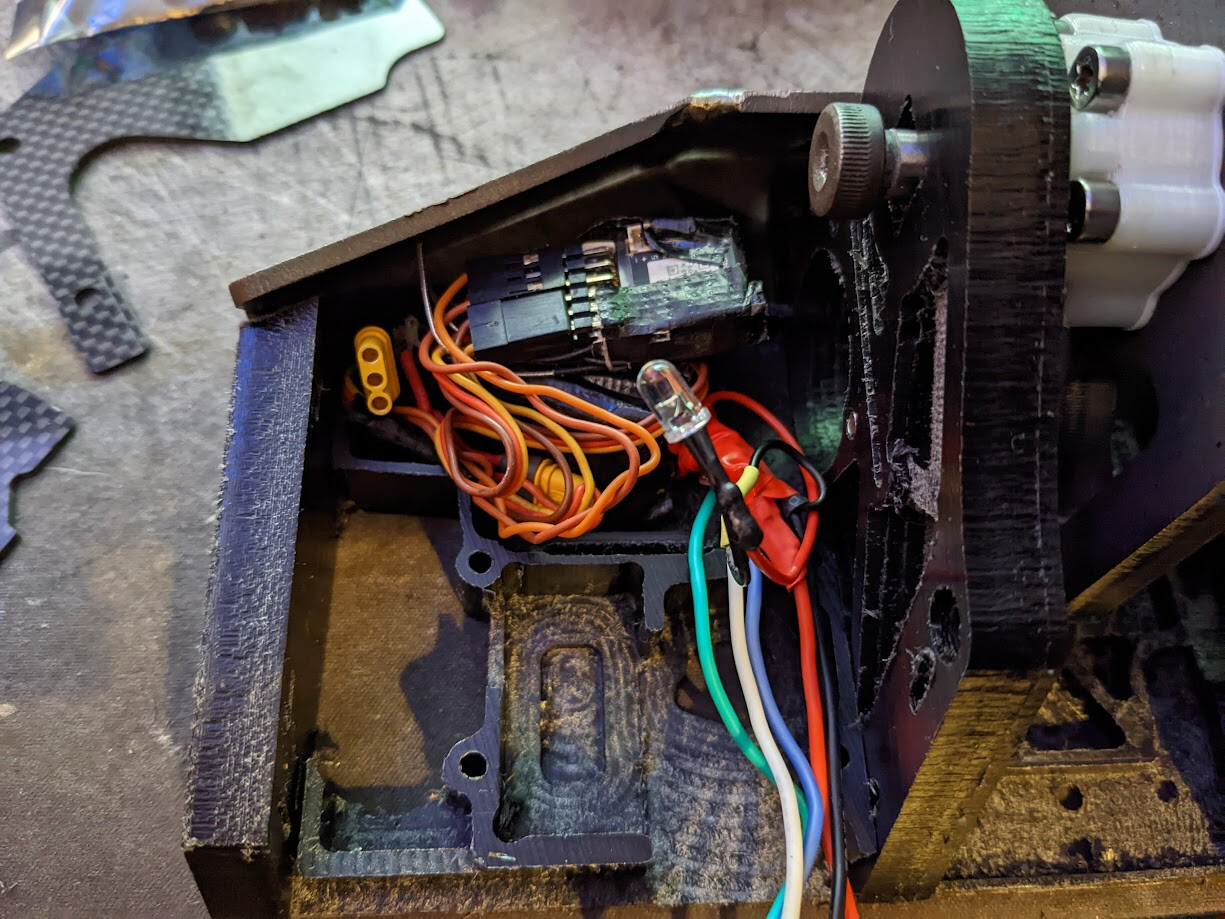
So those few hiccups 1 I miss ordered a Carbon Fibre plate for the rear that was too small and I wasn’t able to get one in time for the Dojo tests, so Sam being a legend was able to print an Onyx one at one of his work printers. The other hiccups were found the night before the event. I was struggling to wire it up as it was a small space i haven’t had much experience with stuff this small so the night before I stopped off at Sam’s who as also going to have him wire it up and then stuff started to go wrong. Firstly the escs which did work last time used them now didnt want to, i had done little driving tests before redoing the loom to make it fit so either it was bad luck or I cooked them, soo good start, following on from that the weapon esc wasn’t seeing a ground signal even when soldered directly to the negative. Gotta love robots….
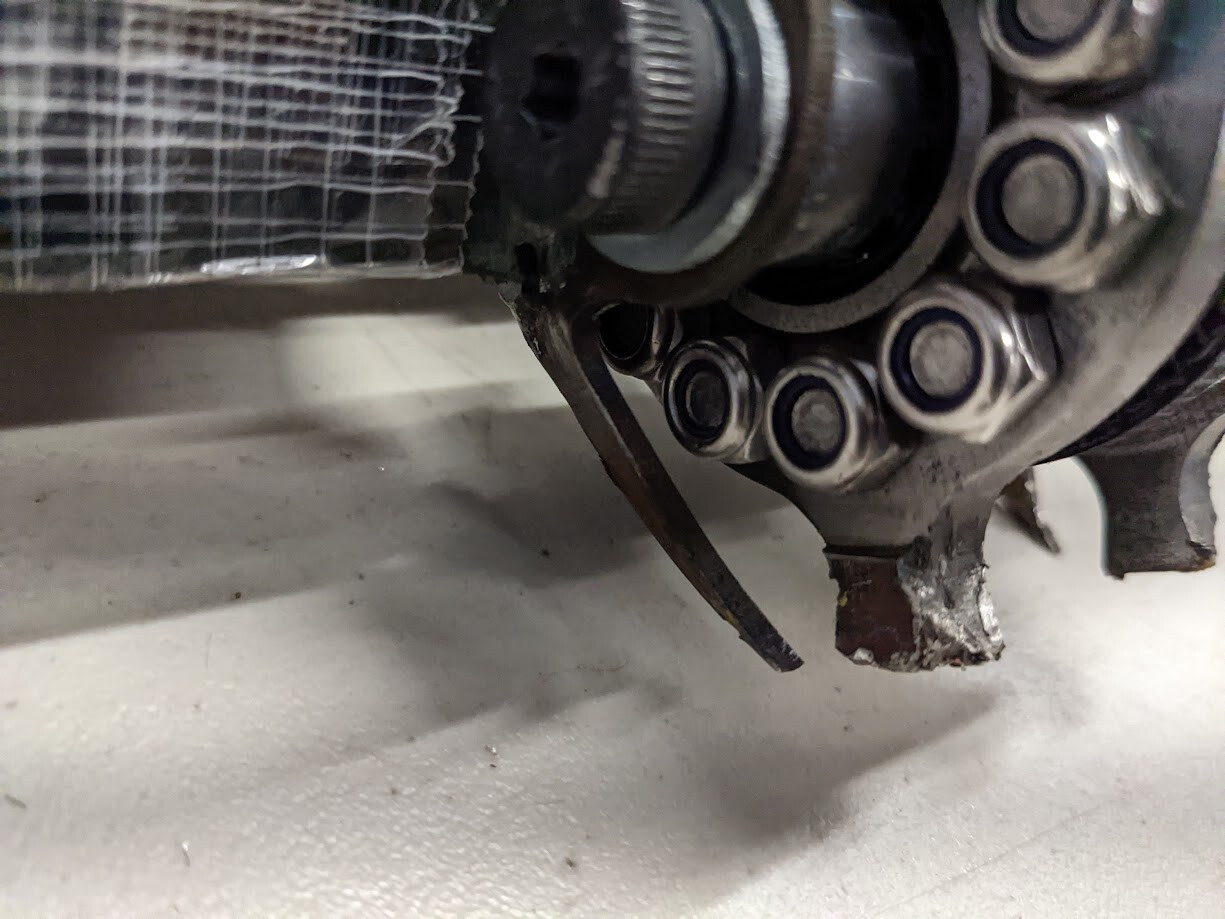
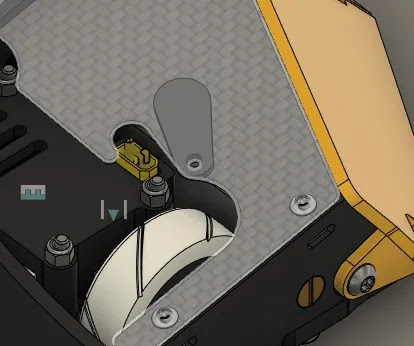
Luckily I had a “new” Weapon esc that just needed programming and Sam in his box of bits had two afro 12s so, quick soldering sessions and we did a test in the test box and everything works yay but the weapon spins backwards boo. So quick trip back upstairs, some programming help from Gus we had the weapon spinning the right way woo but the next “hiccup” soon appeared now some of you may of noticed this already but there is an issue with the weapon belt. The weapon pulley threads onto the Emax’s prop mount, nice little packaging feature, i hadn’t loctite it for 3 reasons 1) with testing and fitting of stuff it was easier to have it removable 2) the heat from the motor is likely to soften it and break its hold 3) i forgot… soo, when it spun down the motor, slowed down faster than the disc soo it rapidly unthreaded and got punted across the box.
That feeling of dread thinking of all this effort for nothing, as it didn’t have a spare, but I got very lucky as we found it and it was fine, the flange had fallen off and that was it. So quick bit of counter boring, checking of the threads and a grub screw and we remounted the pulley and we were all good again on the weapon yay, try to drive and one side was dead boo again… I really hate robots.
So back upstairs for the last time, checking the wires, finding a broken joint resoldering much cursing at both me and the robot from Sam and at midnight we tested it again, the drive and weapon worked even at the same time.
So Dojo
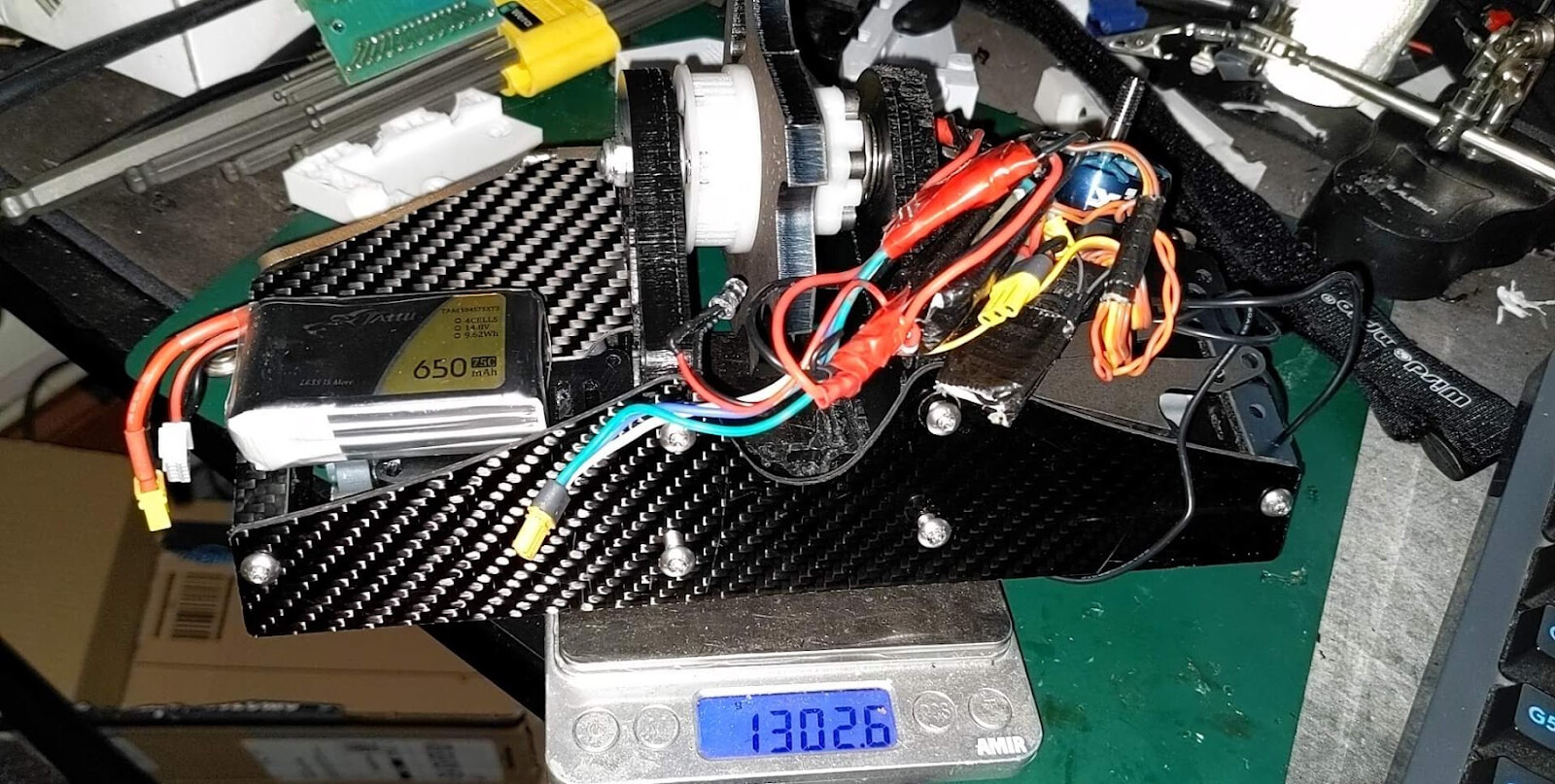
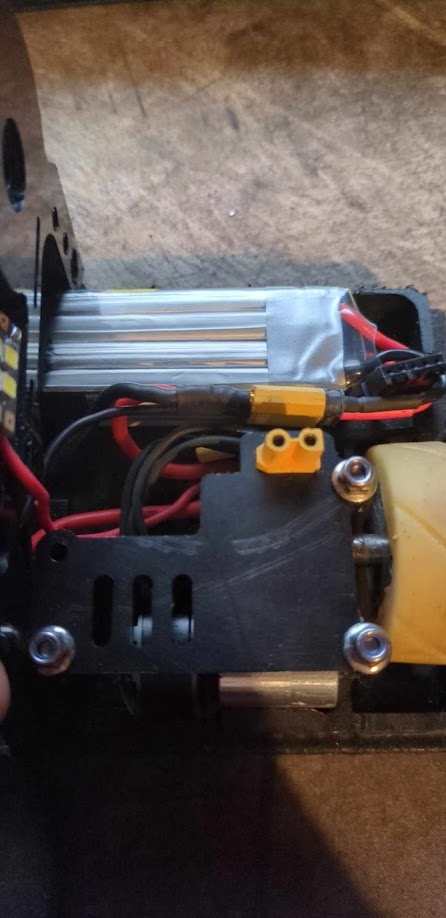
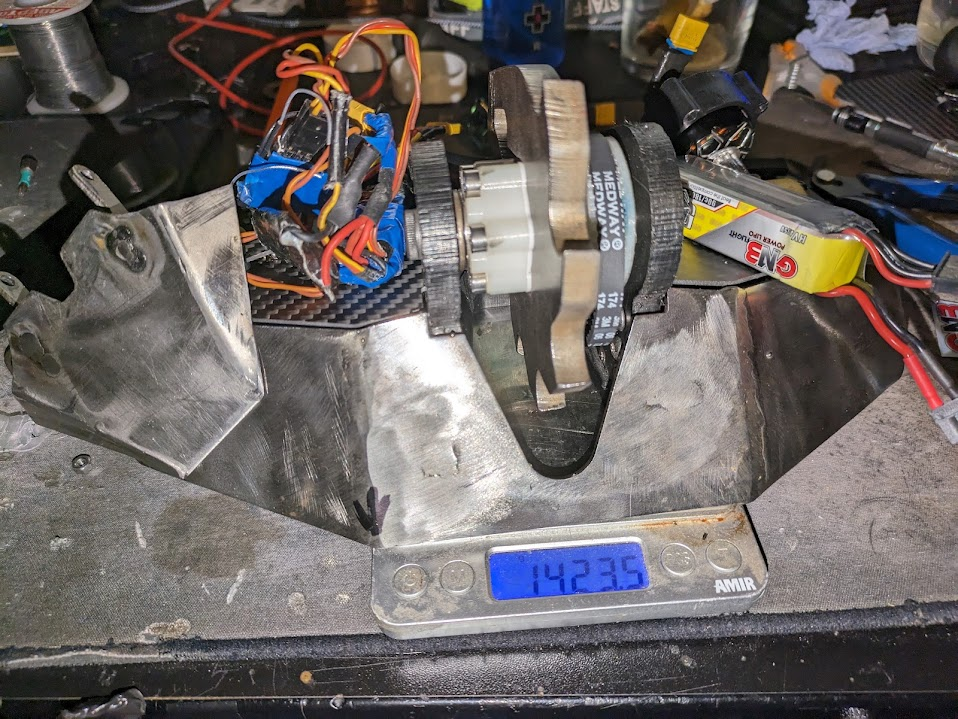
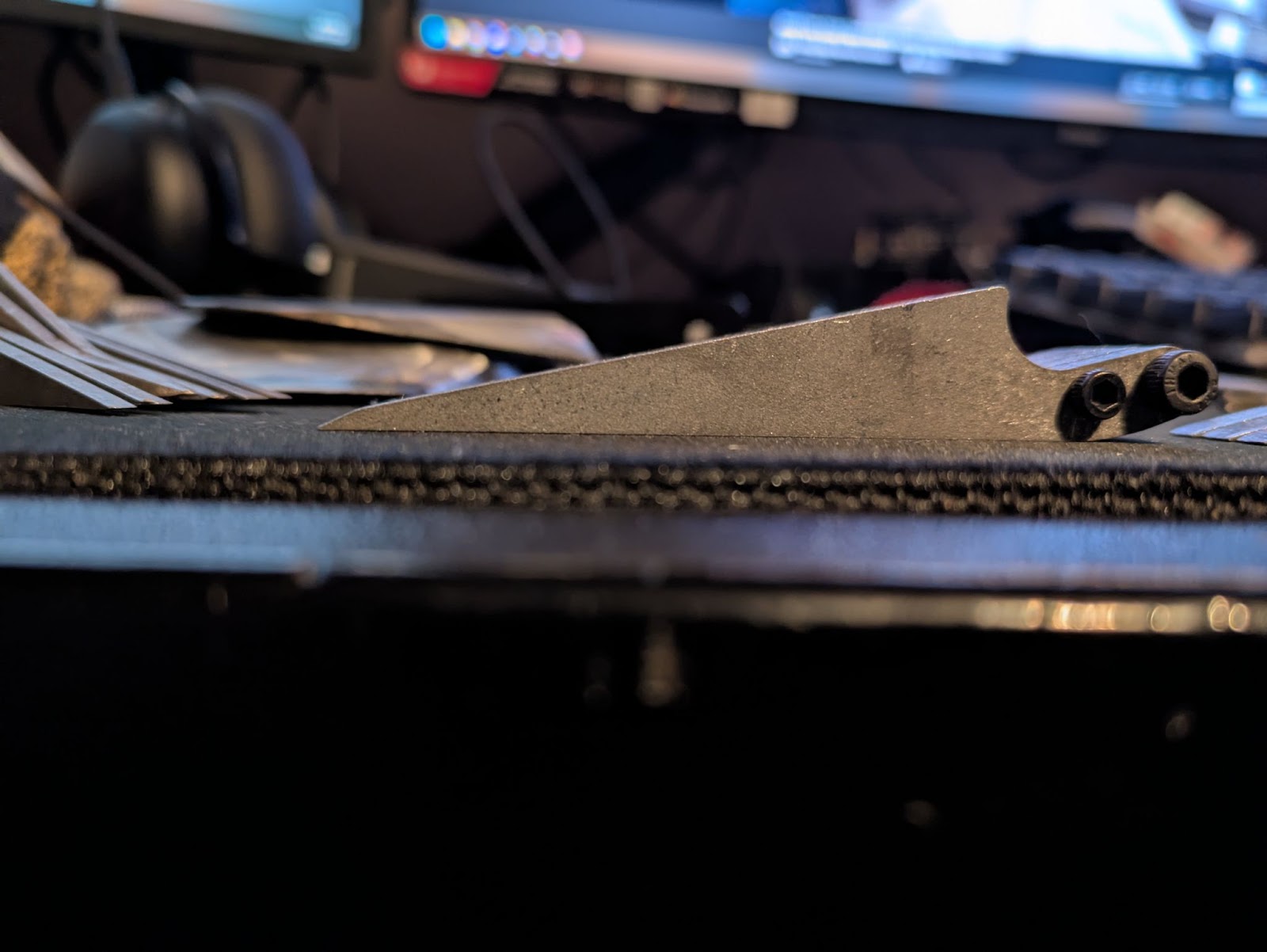
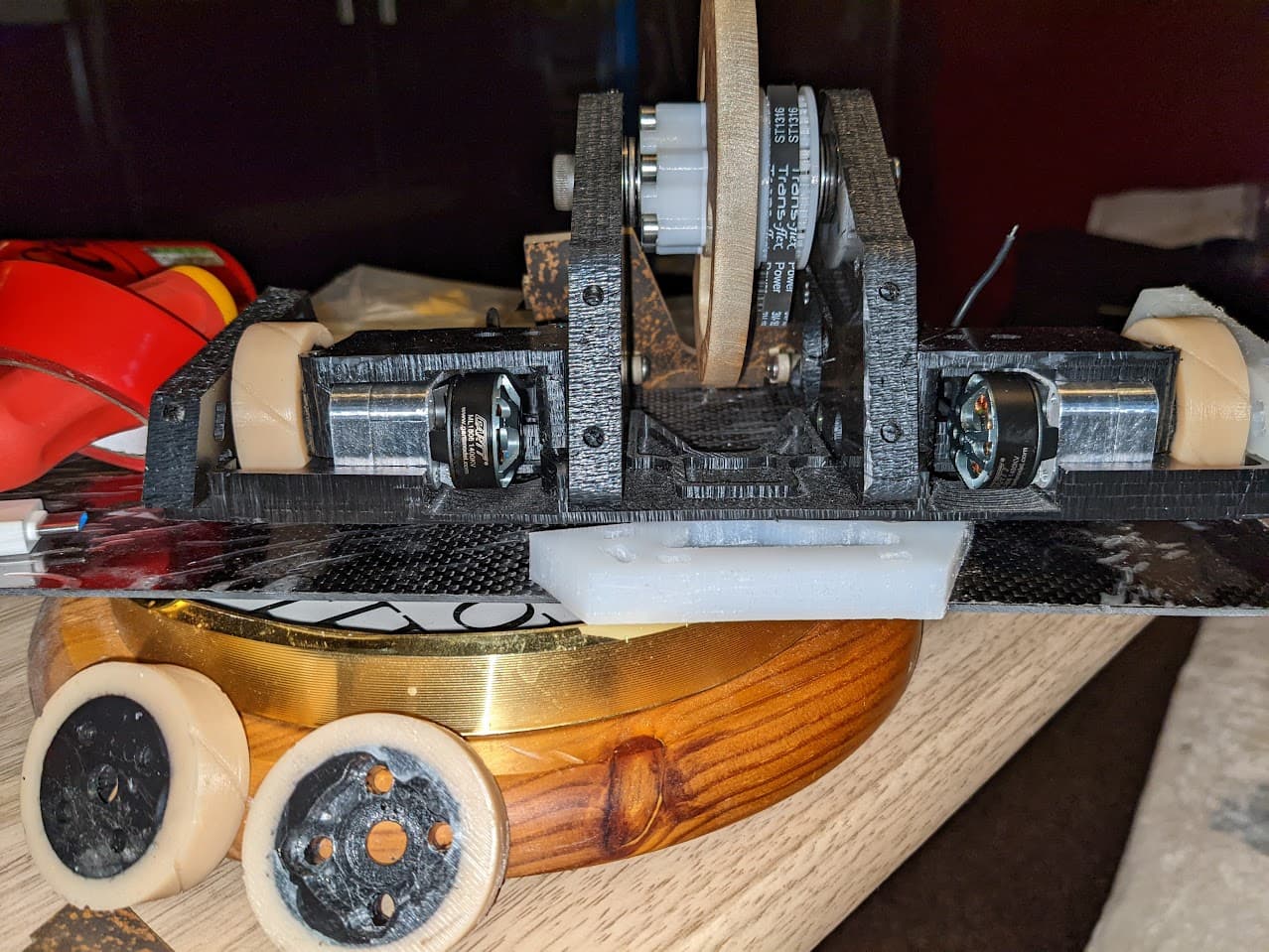
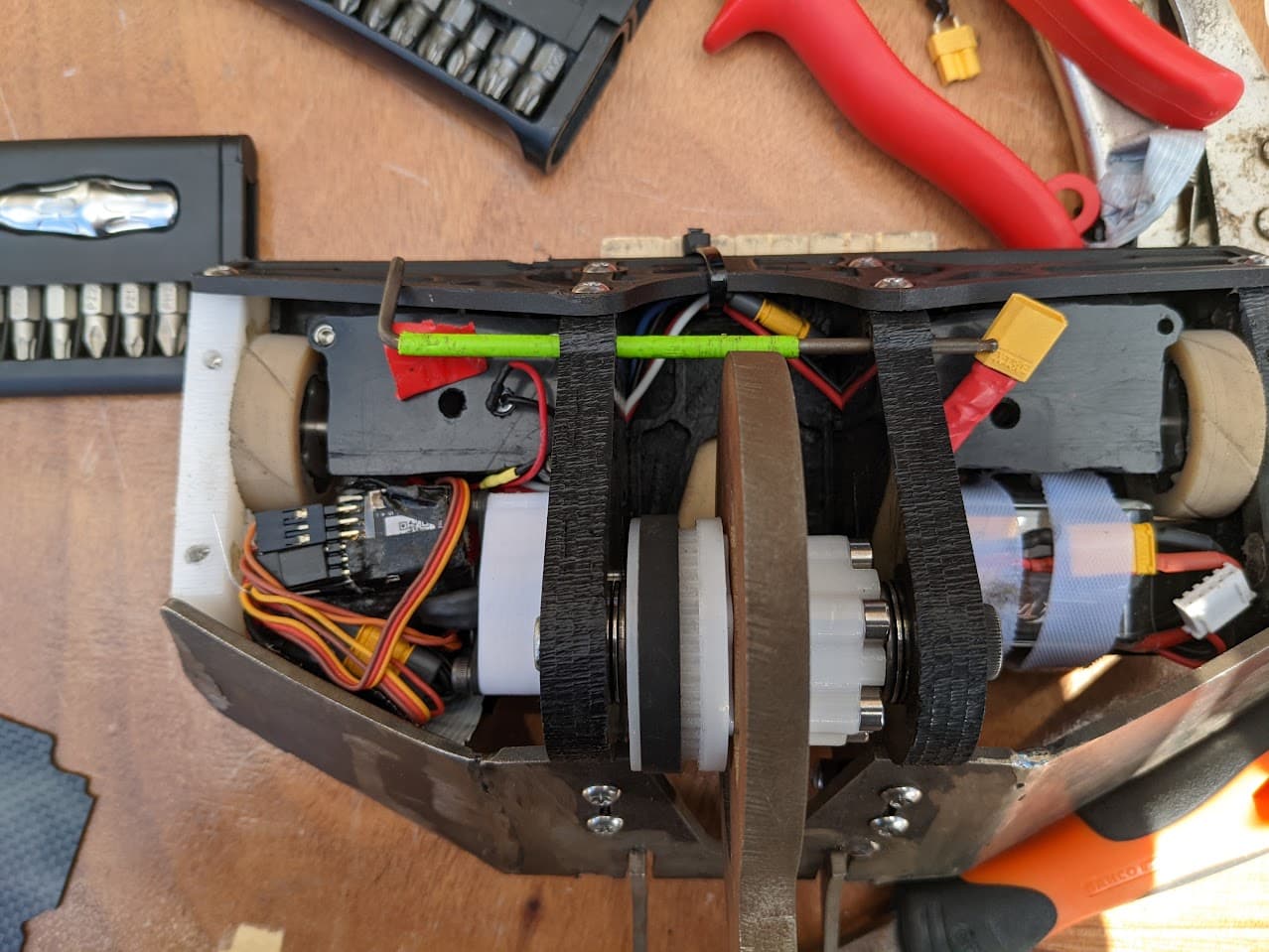
The robot due to it being dense and missing the CF back plate it came in quiet under weight, it was very nearly US Legal… With a hardox wedge mental


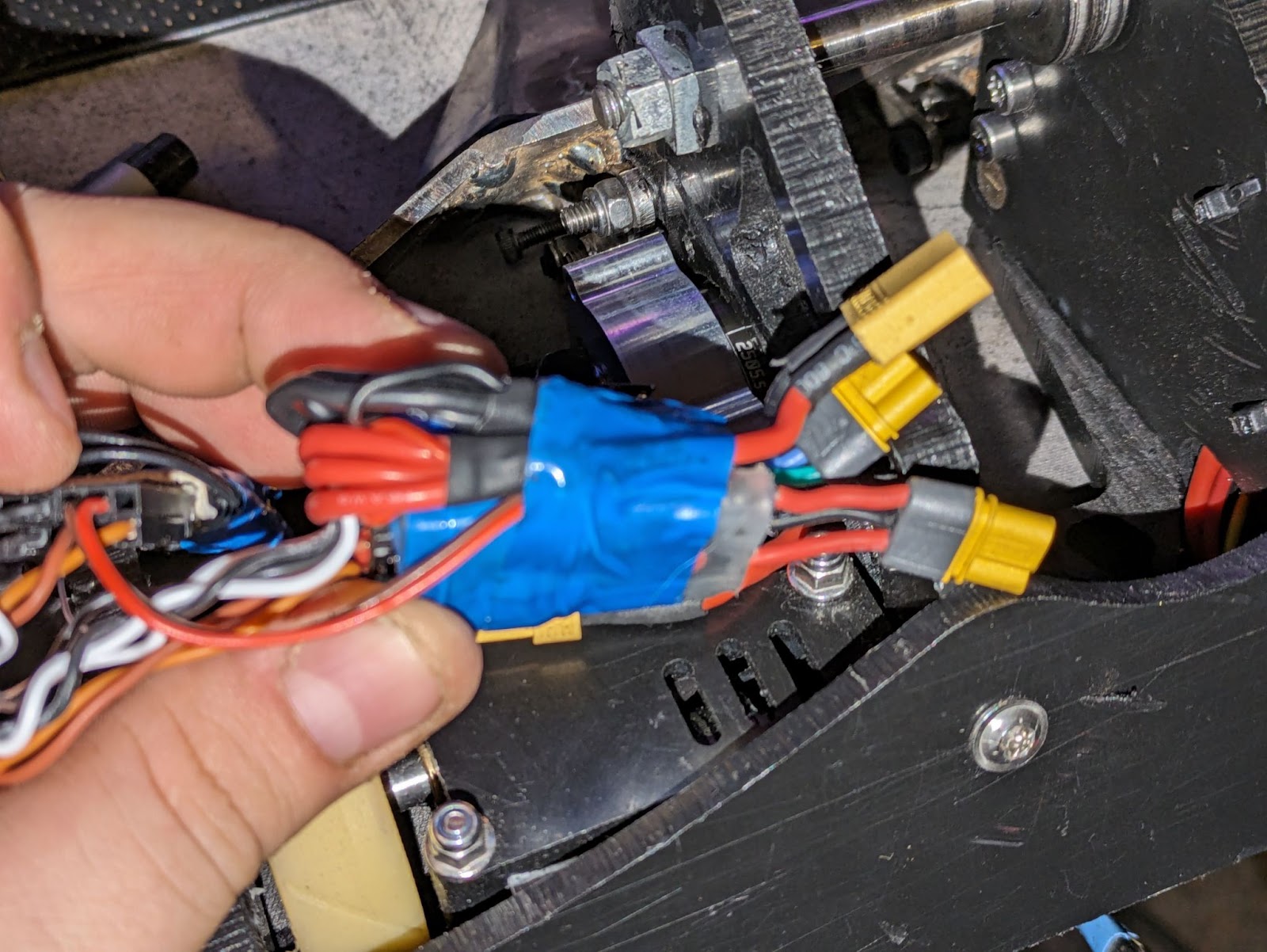
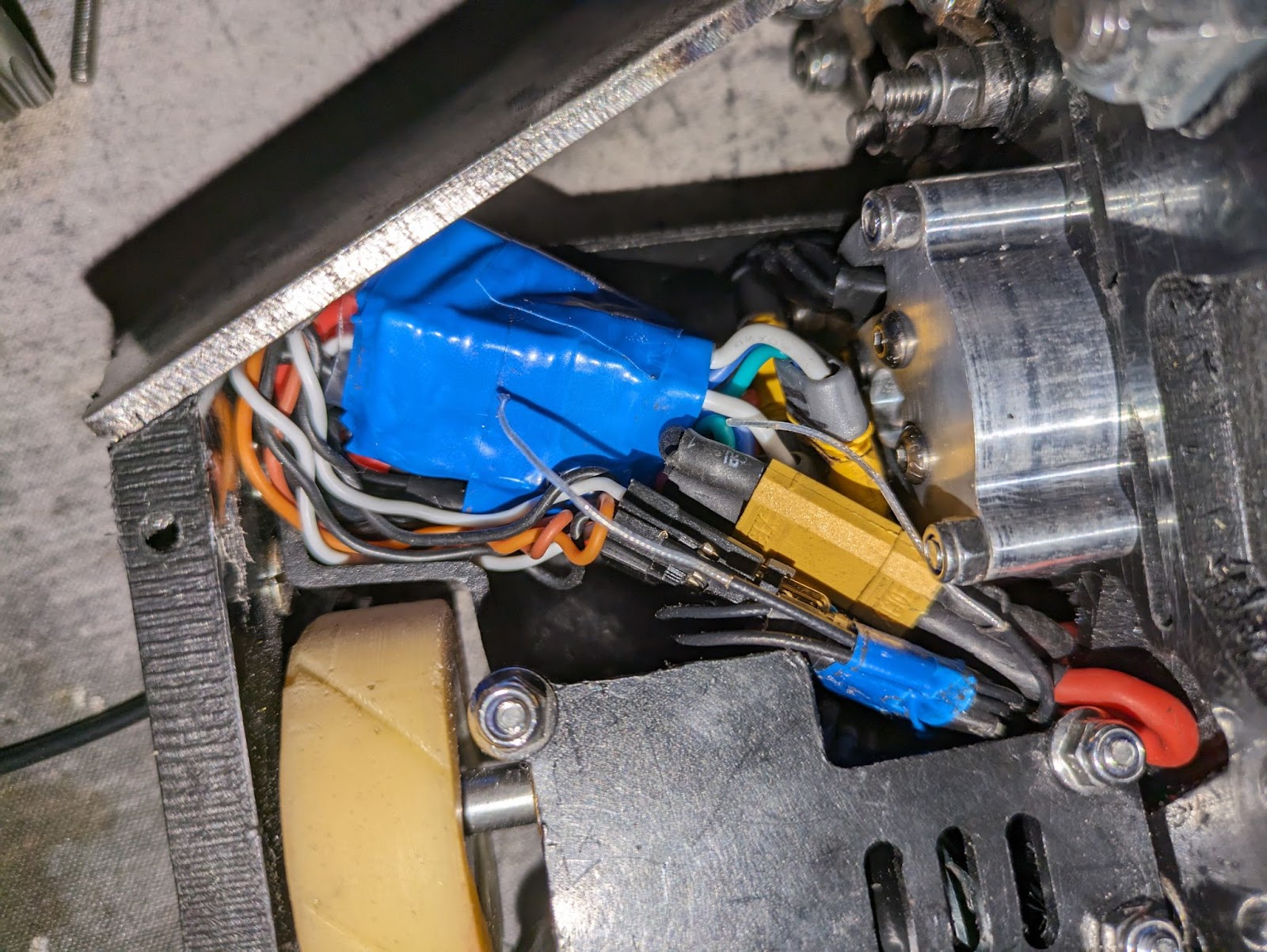
From this image you can see the nightmare of wiring it was
So the event itself went ok, i had a ok draw in my opinion, only got two spinners bby Shrekt (oh the irony) and Endboss (oh no)
Here is a link to all its fights

Round 1 F7
Speaks for itself, it works yay
Round 2 Bby Shrekt
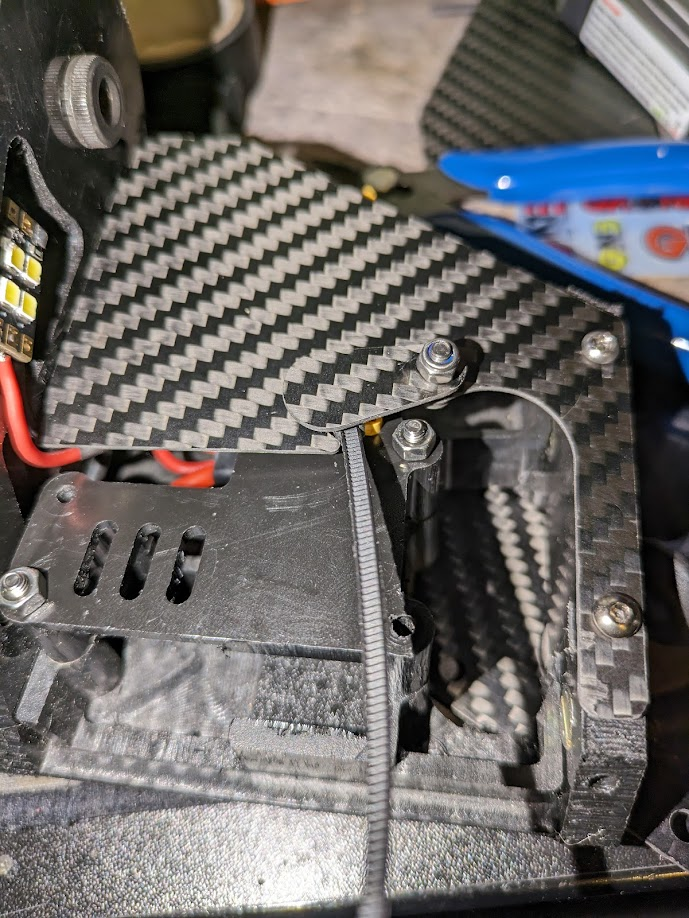
This is where one of the first flaws started to appear, the forks I had designed were meant to use a single screw so they are hinged but had the top section stop on the wedge not allowing it to go under the robot, well that was the plan, but due to tolerances this wasn’t the case and one fork span round and locked the weapon, so new forks are needed.
Round 3 Deja Two
This is where another flaw came to rear its head, the fork design was shown again to just be bad, but not only that the weapon motor mount had started to melt, as it was a last minute thing, it was made from a carbon fibre plate with a PLA spacer and rather it just being 3 stands off I made it into a single part trying to act as a wire guard, well motors get hot and spit out hot air, hot enough to soften PLA which slowing drooped onto the motor can and add a massive amount of friction to it acting as a break. Another thing that happened that the wheels had started to split, due there design they were two parts of HDPE and PU doesn’t bond to PE at all so it had to limit the gyro to stop side-loading it too much
Round 4 End Boss
Only thing to say here is again fork design is bad and I had good luck
Round 5 Loki
Again it forks not ideal but once it gets a hit it the weapon is fine
Round 6
this was a playoff for 2nd I believe and yeah not much to mention i haven’t already
So overall it was a good event and I learned a lot of things that needed fixing
Things to change
1 forks
2 better weapon motor mount/placement
3 Better wheels
4 more space
5 spares