Hi everyone, apologies that it’s a fairly regular vert design but hopefully someone learns from the inevitable, expensive mistakes along the way!
Vortex BW started as an idea to try and build a scaled down version of the formerly-working heavy George and I used to run: Vortex. Whilst it was a complete sack of bolts, it did at least have quite a cool look to it and it would have been pretty unique in the beetle scene. The problem with this plan was that heavies don’t scale down very well, so after multiple cracks at it the plan was abandoned.
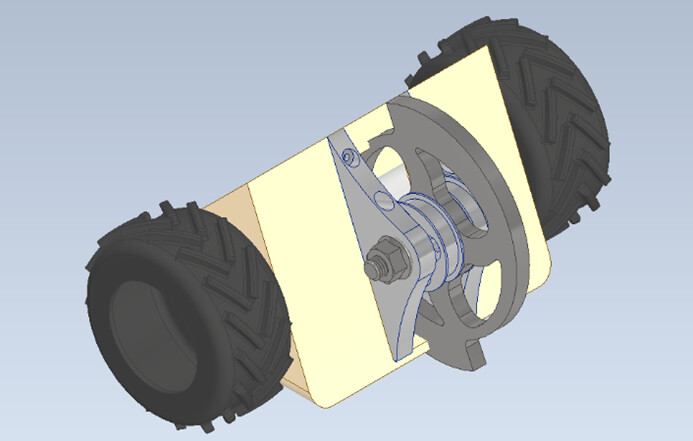
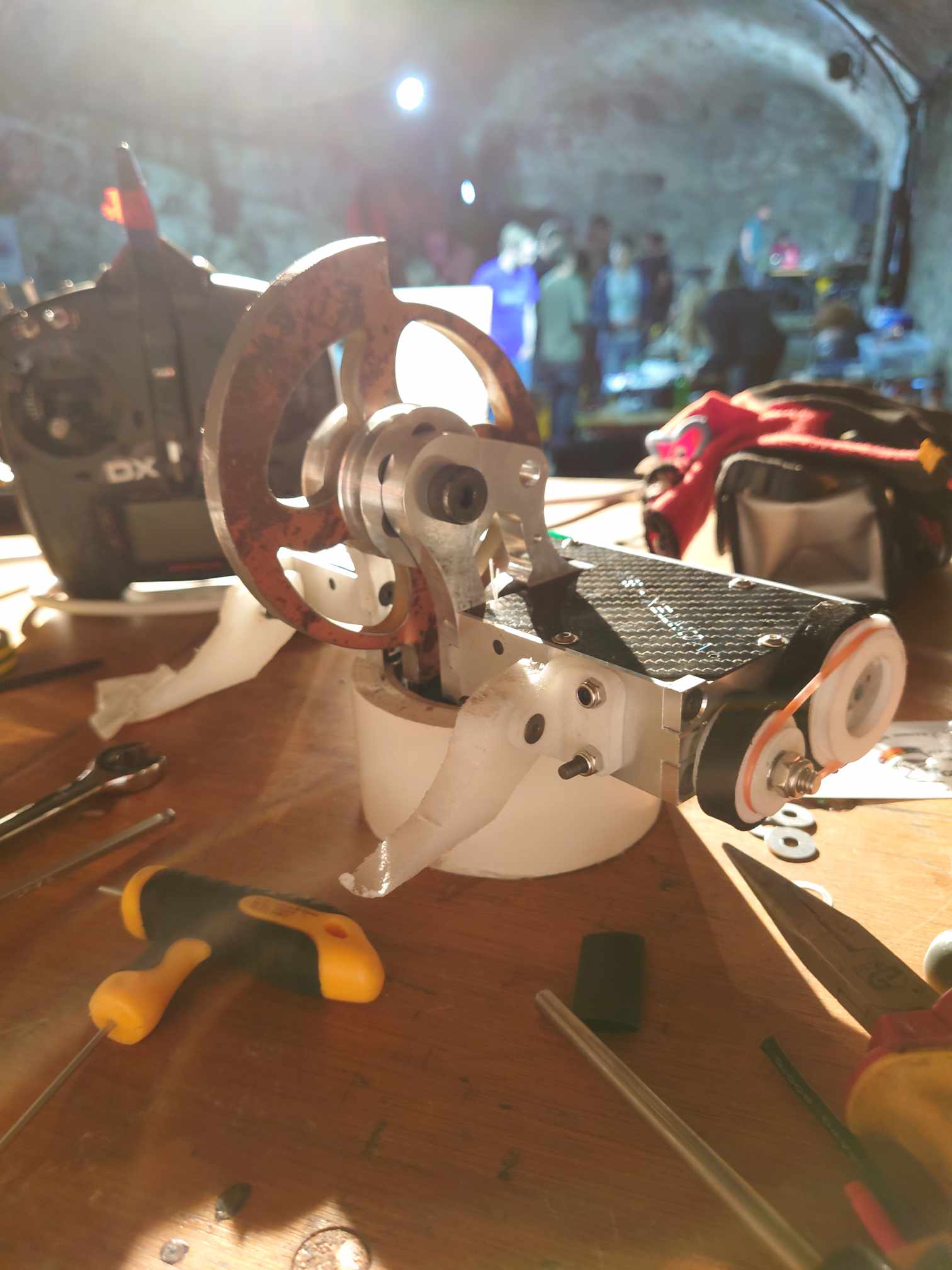
Figure 1: The first draft of Vortex BW. Awful
However, during the aforementioned design process there was one bit that was consistent throughout. The disc design. The size was pretty well set early on, and the look is a straight scaling down of the heavy’s disc. So in my infinite wisdom, I went ahead fairly early in the process and got that waterjet cut, along with getting 2 pulley/bosses for it CNC’d in China. I then later decided to can the mini-Vortex project and was now stuck with the disc and pulley combo…
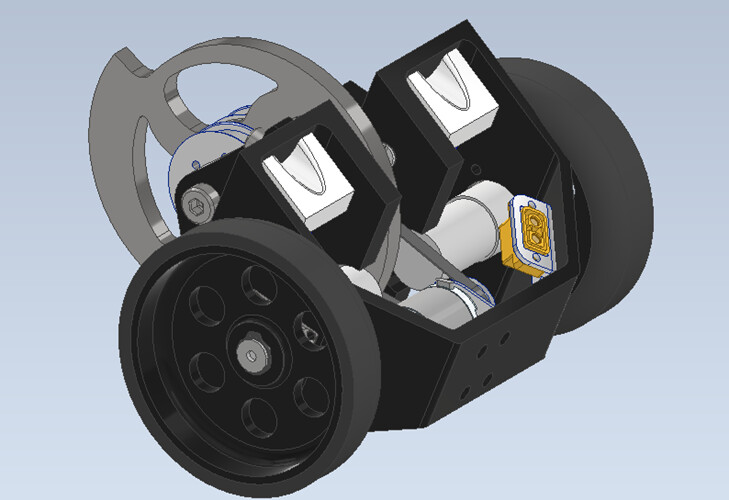
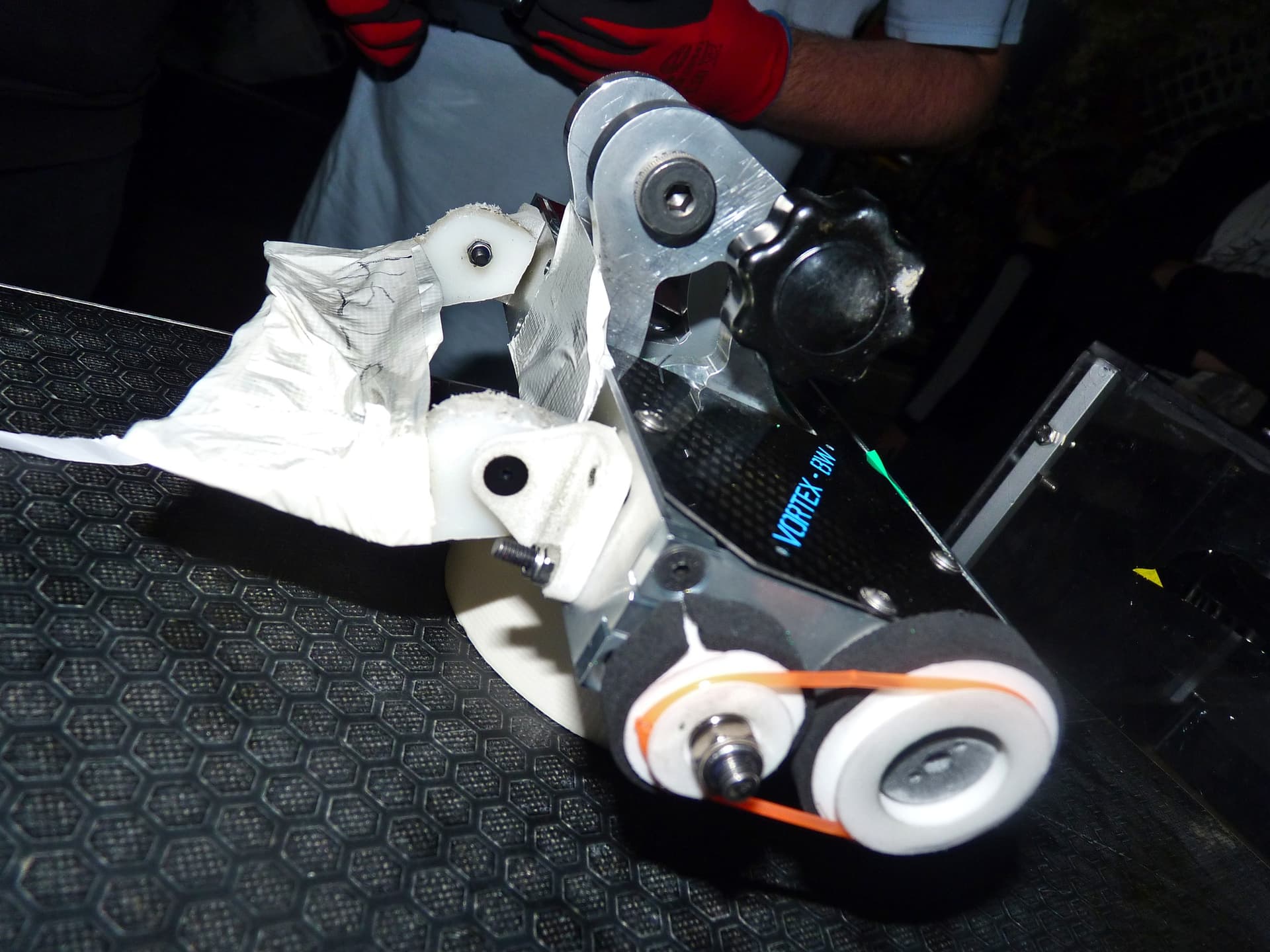
Figure 2: A later draft that’s better than before, but nowhere near being considered good.
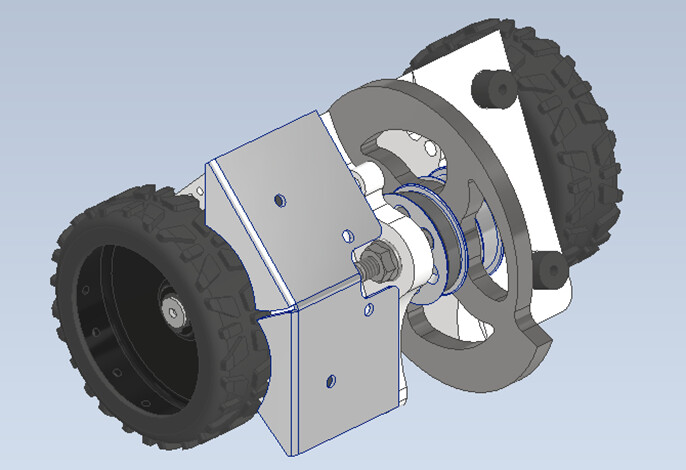
Figure 3: Around here it was all called off
That was until January, when a heavy cold beset me and I decided that I was going to pass the ill time by designing something to make use of these parts I’d had made. I would strongly advise that all Lemsip packages should contain warnings to not design robots whilst under the influence, along with operating heavy machinery. The robot would maintain the name Vortex BW as a nod to where the whole idea kicked off; but was now simplified to a vehicle to move the disc around in a fairly simple package.

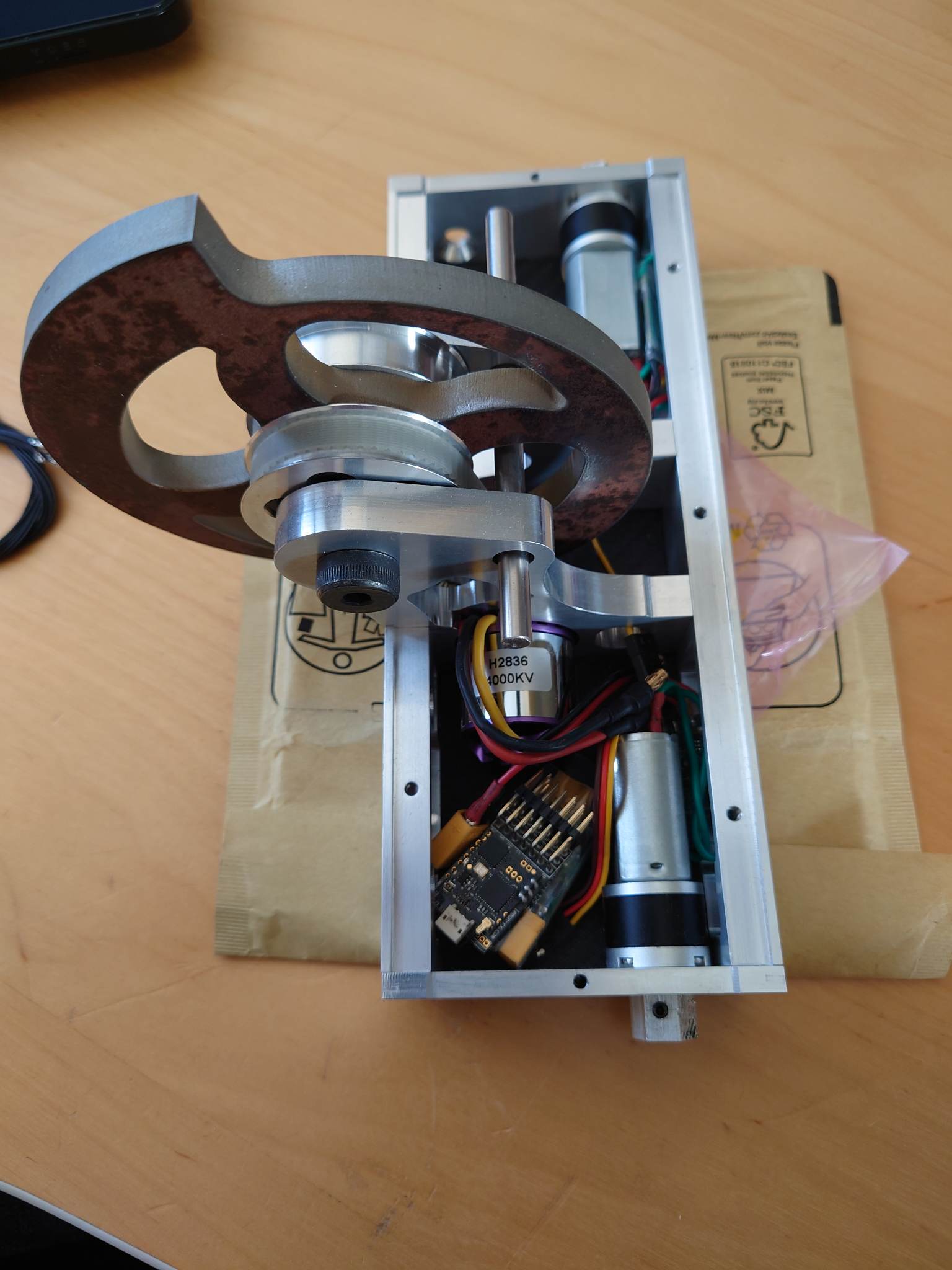
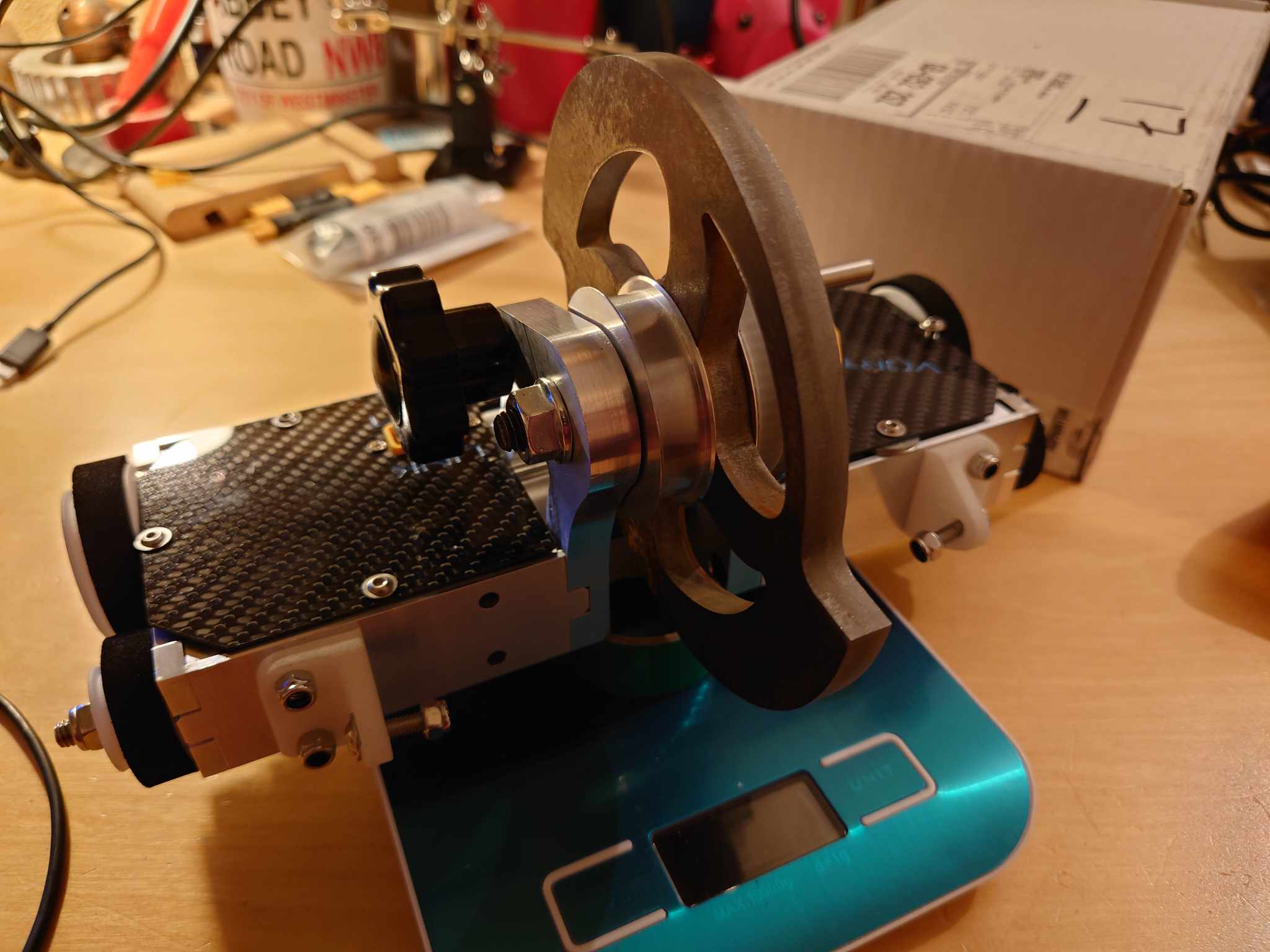
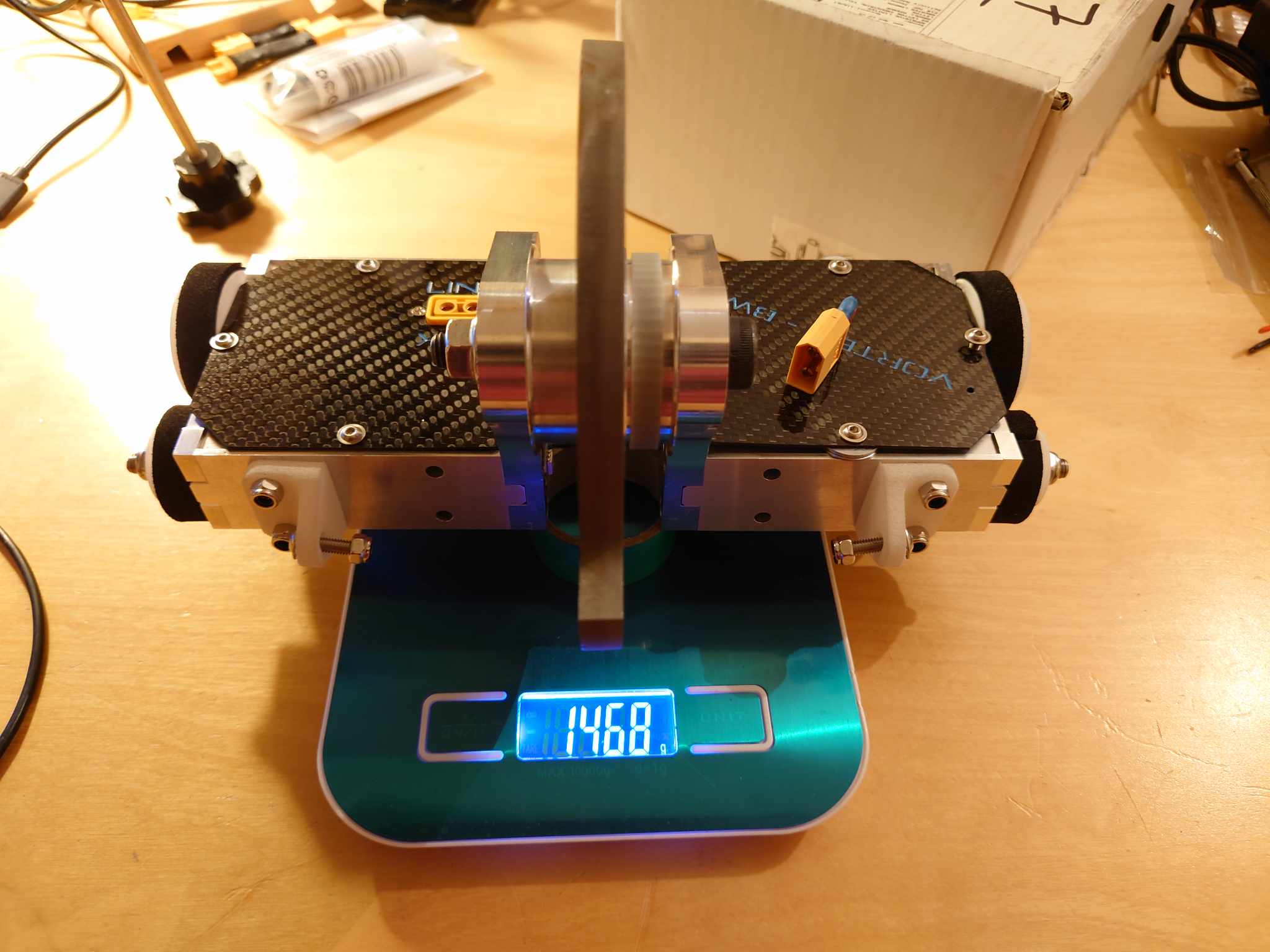
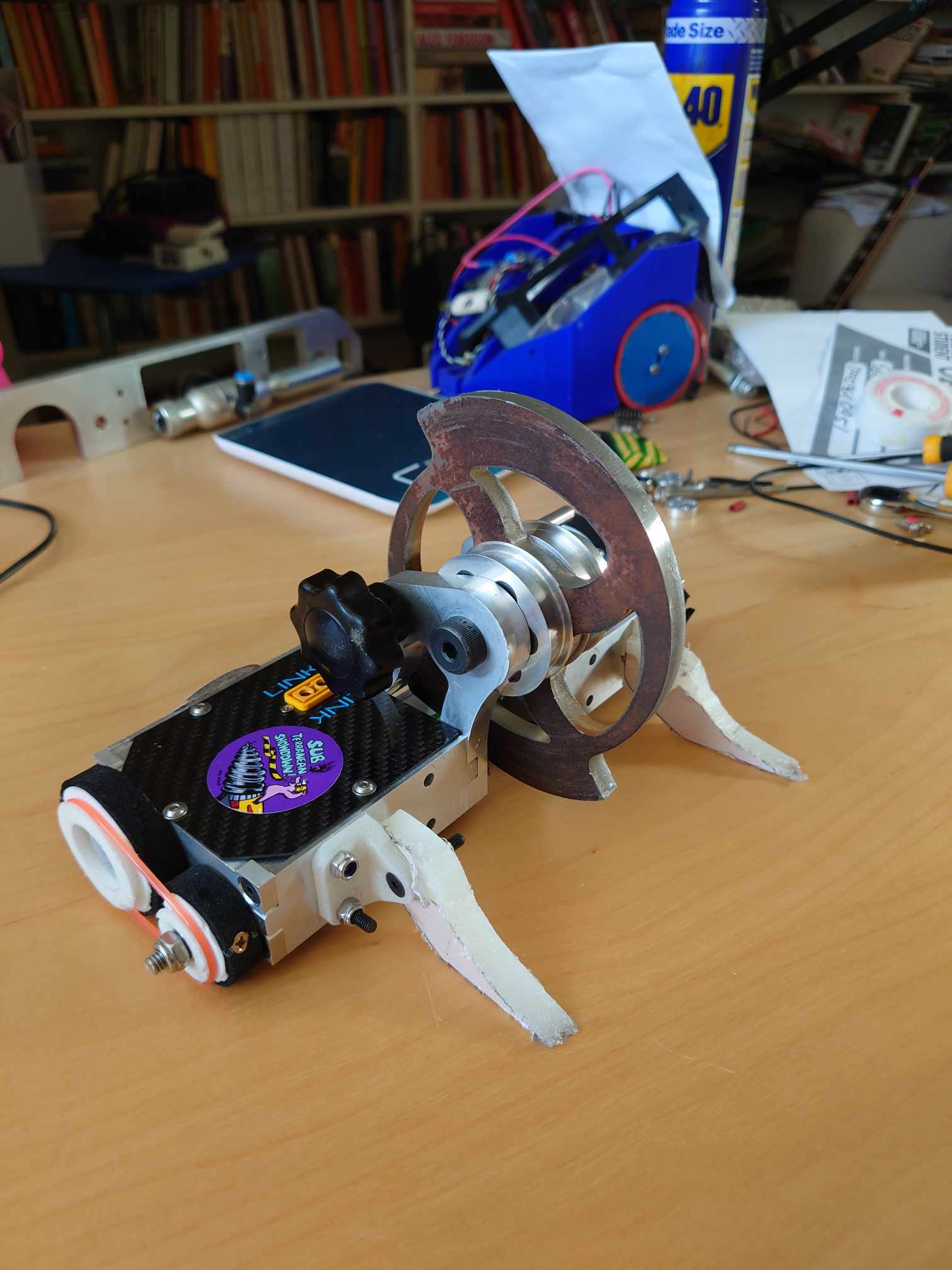
Figure 4: The disc assembly, I’ll need to clean and polish the disc before it makes an appearance out in public. This whole lot comes to exactly 500g
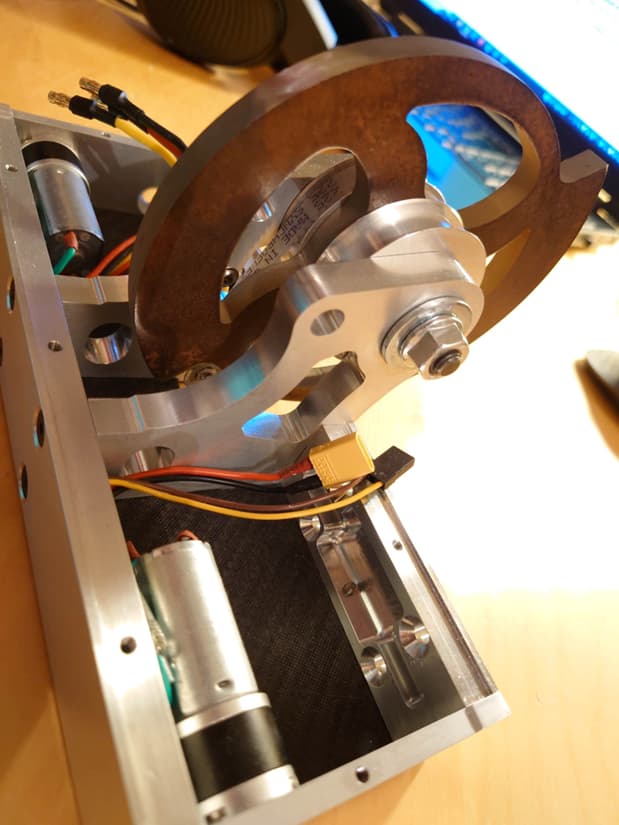
The disc I was saddled with is a doozy, it’s only 130mm in diameter but it’s 8mm thick Hardox 450 and weighs around 420g on its own. Add in the two pulleys and it’s exactly 500g, which I’d love to say was clean design but is good old dumb luck. It’s a 2 toothed design, which isn’t too common at beetle level but that’s a factor of being a homage to a heavy. That ended up giving the design some focus, the two toothed design would lend itself better to being a lower speed design that is focussed on follow through. That then paired itself to having a fairly high speed motor, but gearing that down to get some good torque behind the weapon.

Figure 5: Another angle, the disc itself is 8mm thick. A pair of needle roller bearings are the rotating elements of this setup, we’ll see if they are sad in use or not
Because the disc was so heavy, the rest of the bot had to be fairly light. It was obvious that the bot was going to be firmly in the glass cannon category, but that’s no bad thing. From there, it was a question of how I wanted to build it. For a long time I’ve admired bots with CNC’d aluminium frames and had wanted to build something in this style. Needing a small, solid robot to cart the disc around, it seemed the right time to exploit the benefits of this design style. From there the rest of the design fell into place.
The CAD started by placing down the internal components, and gambling on how small the chassis could be wrapped around them. The robot is intended to run on 4S, using an Overlander LiPO and runs on a pair of 22mm motors from our forum overlords. The weapon originally was intended run on a Propdrive 2836 but that being perma-out-of-stock required looking elsewhere. eBay came to the rescue there, and a FlashHobby 2836 was purchased instead. We’ll see if that is reliable or detonates in fights.
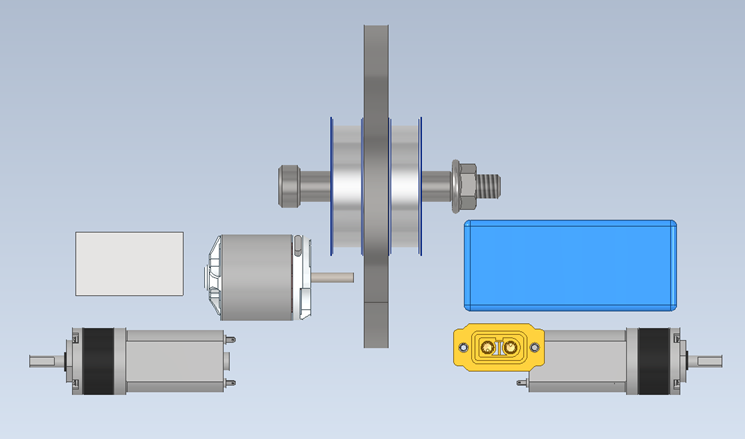
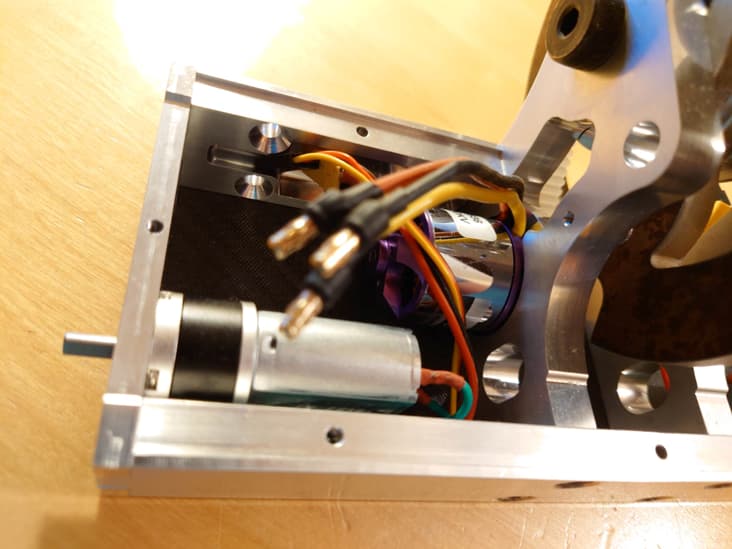
Figure 6: The start of internal tetris. It was shaping up to be a smol bot, with hopefully enough room for wiring…
The frame then got wrapped around these. US style alu framed bots were the inspiration for the frame so it’s pocketing central here. This was very much necessary to get the chassis within weight, and there’s some deep pockets in the front and rear to add lightness. The majority of the chassis is 10mm 6082-T6, although the 2 sides are 5mm thick with no pocketing. The weapon bulkheads feature weight cut-outs rather than pockets, although the weapon motor itself is pocketed into the left bulkhead. That should help with alignment of the driven pulley to the weapon pulley.
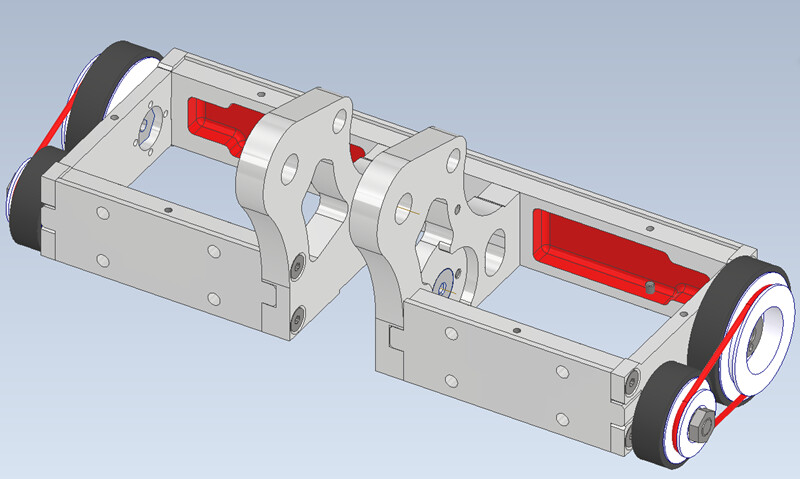
Figure 7: The aluminium frame for the machine, sans all internals. It’s deeply pocketed, hopefully it doesn’t implode when hit! Mount holes are present on the front face for future wedges/forks
Carbon was chosen for the top and bottom covers, chosen for a light weight along with looking slick. The top and bottom are pocketed into the chassis rails to try and stave off the chance of either getting obliterated in a glancing shot. The baseplate In particular might still explode if hit by a vert, but at least that’ll be entertaining. The whole frame bolts together and has finger tabs to try and take loads off the M4 fixings holding everything together. If a part is damaged beyond repair, then it can be swapped out although the hope is that a single chassis should be good for a couple of events. We’ll see how that goes in practice.


Figures 8: Pockets big enough for all your daily accessories
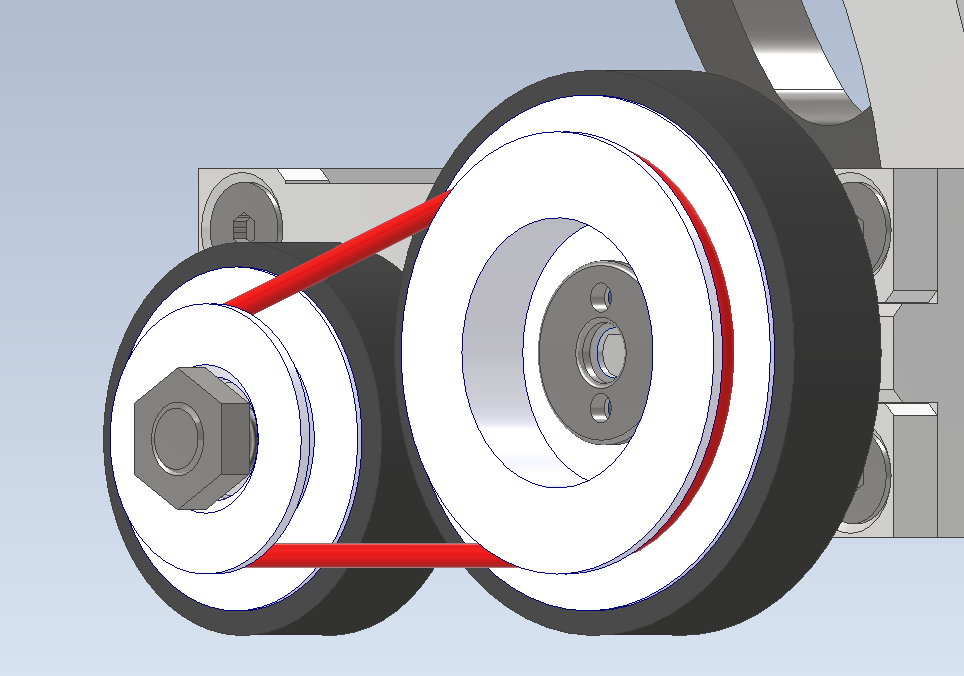
The robot will have 4WD, with the front wheels slaved off the rears using a round belt setup. Slightly smaller fronts are partly to allow clearance space with the rears and partly for looks. They run on a M6 bolt, and can be removed to make weight for front setups if a wedge or somesuch is needed. The wheels themselves will be 3D prints, with hex hubs on the rear that I’ll make up from some hex bar off eBay (again). I’m going to try EPDM strips for a “tyre” surface, we’ll see how that goes. We use it a lot at work for flooring, it wears well and is grippy. How it works as a traction surface, I’ll report back!
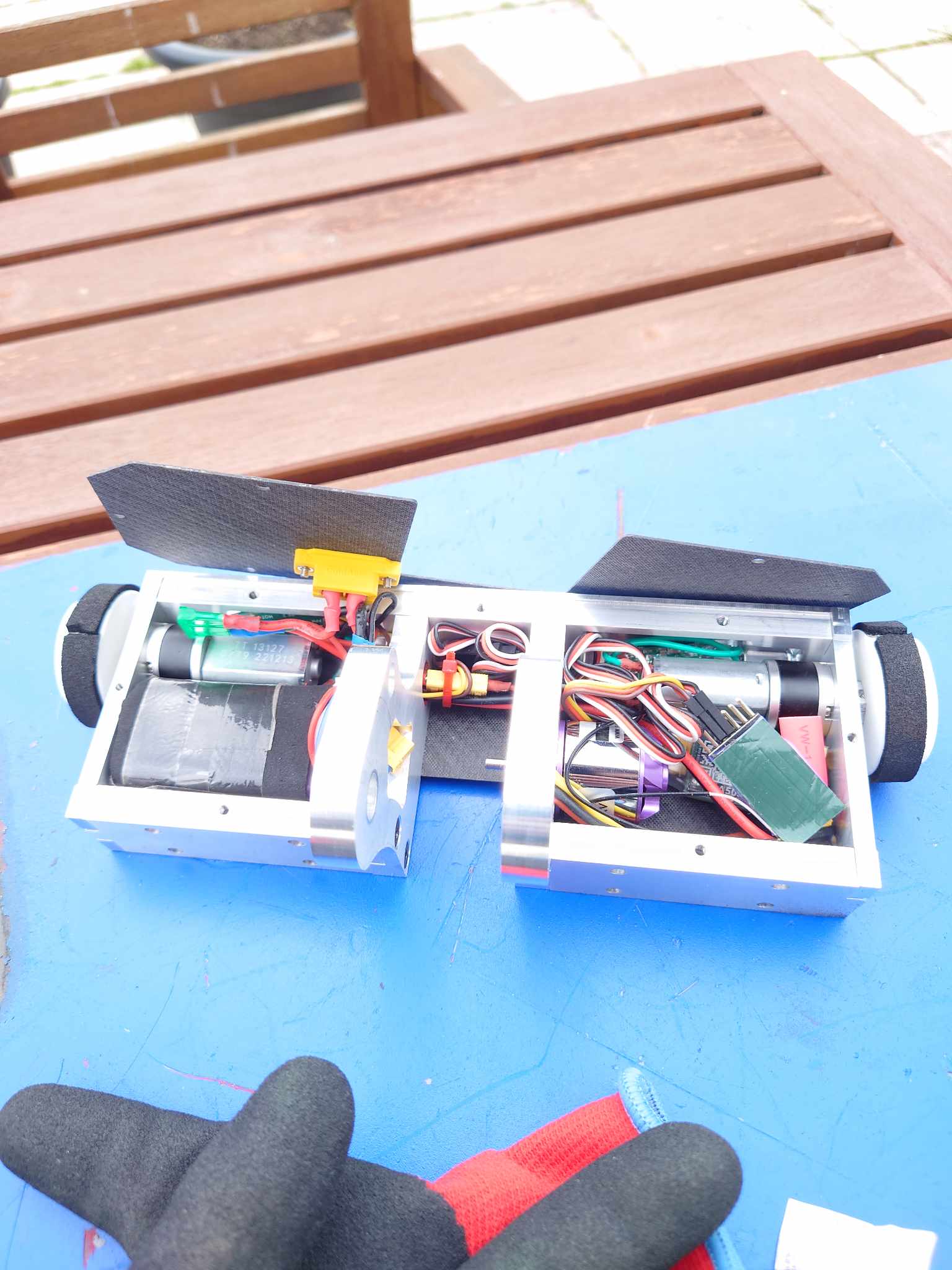
As it stands, the disc setup is all done and I’m happy with it. The frame is CNC’d, done out in China and seems very nicely machined. The top and bottom are here, the drive is in, drive ESCs are in and the weapon motor is sourced. It needs a bit of 3D printing to get the wheels etc made up, and a weapon ESC. I’m thinking one of Euan’s 50A VESCs for the weapon as I could later use that in the fabled Vega 2. Then the fork situation needs worked out, what the plan is and how I fancy doing that. It will have some sort of fork option, as well a wedge hopefully, but the specifics of those are still up in the air for now.
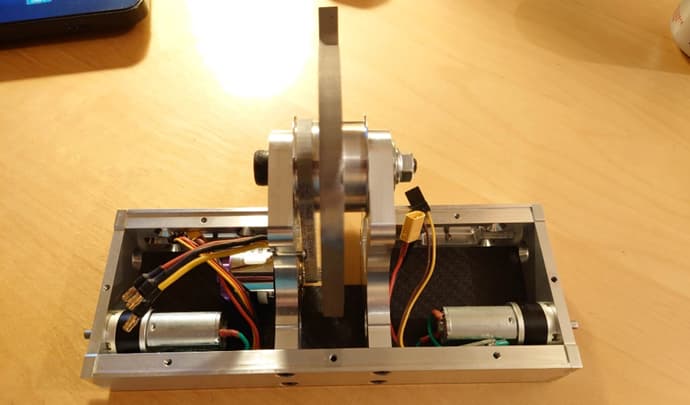
Figure 9: I’d call the frame “figure hugging” around the internals
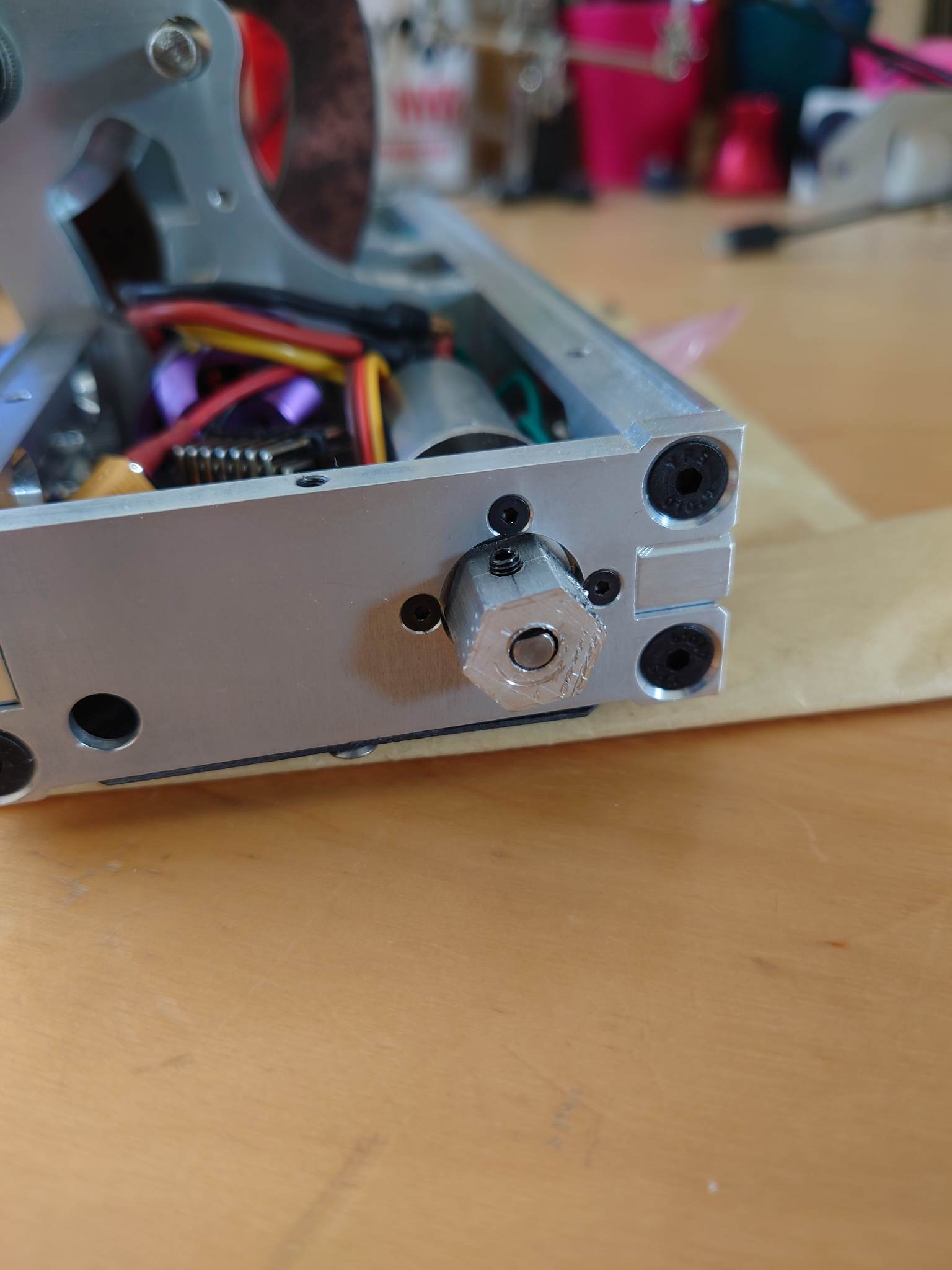
Figures 10: Close up feat. the space for the A50S VESC and receiver
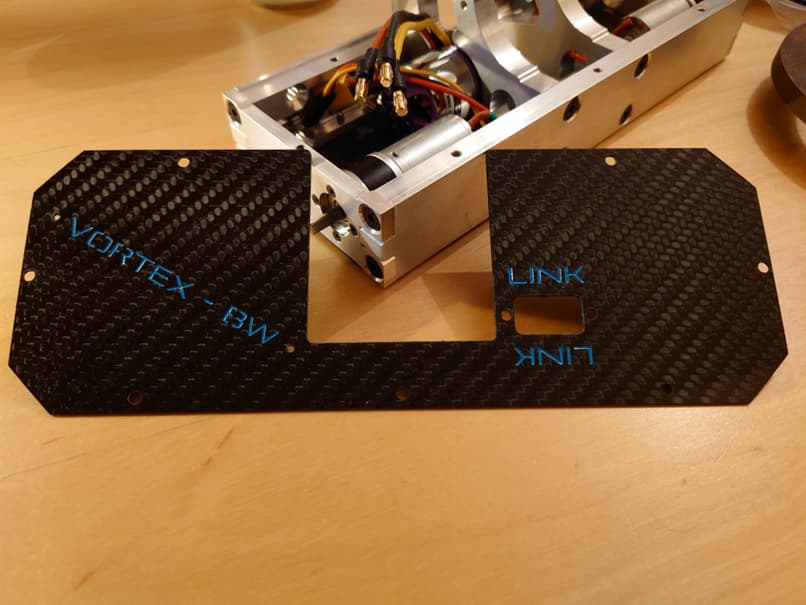
Figure 11: Carbon - looks cool; may explode
I’m hoping to get this all together over summer, and hopefully make some BBB events this year! If I’m dragging on that, I need the community to hurl abuse at me until it’s done so please remember to do this. Hopefully, I’ll be back with some running progress on this soon.