when I push forward on a right stick the ant weight is meant to move forward but it spins in a circle I don’t know why it is doing this I am using a Malenki Nano with a 2S lipo battery and 2 n20s 600rmp motors wired exactly how it says to wire it up and when I put them on the same connection pad it moves backward and forward but it won’t go left or right. could anyone tell me what the problem is or if you had the issue before and how to fix it
Hi,
It could be a couple of things.
If you can get the robot to move and drive but directions are inverted or the wrong way around (pushing up on the stick causes the robot to turn and pushing the stick to the side causes it to go straight) that can be sorted by channel reversing on the transmitter and/or swapping the motor wires around one side.
When you say you put them on the same connection pad, do you mean both motors connected to the RH or LH output? If so then yes they will only receive one channel’s worth of input and so will be unable to work independently.
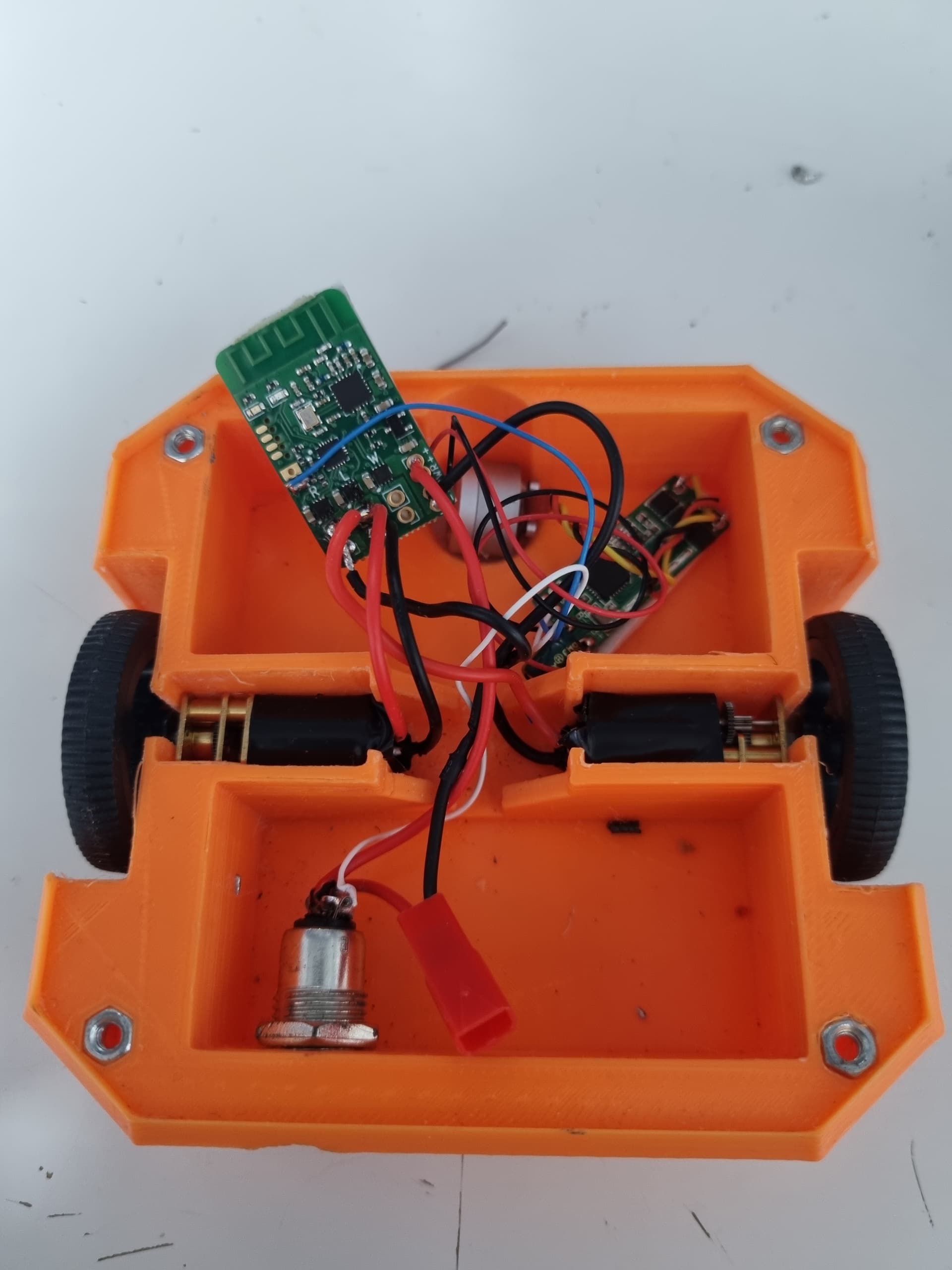
Could you please show a picture of how you have it wired? Much quicker to diagnose.
hi
I don’t think its moves are inverted because it does move in the direction I tell it but it just spins I am not sure why this is happening I meant by that I put both motors on to the same connection pad on the Malenki Nano I put the motors both on to the left motor connection on the malenki nano
What happens when you connect the left hand motor to the LH terminal and the right hand motor to the RH terminal?
If you have them connected to the same channel they will only move as one - in this case this will mean they just turn.
If the robot is going backwards and forwards with both motors wired to the same terminal then one of the motors is probably wired backwards.
hi
they are not on the same terminal but I did try it because it is not working when they are on their terminal not sure why this is happing any idea
If you have it hooked up to the different channels what exactly is happening? Are both motors able to spin in both directions?
If so you just need to swap wires around on the motors or reverse the channels on your transmitter - what is your transmitter by the way?
take a video of what the robot does currently, making sure to show both the robot and the sticks of the transmitter clearly
he is the video you ask for https://drive.google.com/file/d/1oom3fLB1VQuGcWm4zsUj8r_PdxnP-Nfl/view?usp=drive_link
I don’t have access. please set it so that anyone can view
I have done that now
So both motors are moving in the correct direction, but the left hand motor is much slower? maybe check if the wheel or gears are rubbing against the chassis
It could also be uneven friction between the chassis and the ground. Is the left motor noticeably slower if the wheels are lifted off the ground?
I check none of the wheels are rubbing on the chaise have you got any other ideas on why this is happing
Jed mentioned earlier - is the chassis touching the ground on one side?
Are the trims centered? I had a similar issue when I was testing mine and from the audio it seems that the trims are off center because of the high pitched beeping.
I dont think that is the problem because i center the triming and still not working properly but i fix it to a degree but the only problem now is that when i move the stick left it gose forward and it gose backwards when i push right and it spins when i push forward ans same for when i push back it would be great if someone could tell me how to fix it
In that case you just need to swap the two wires on the motor that goes backwards when you push forwards
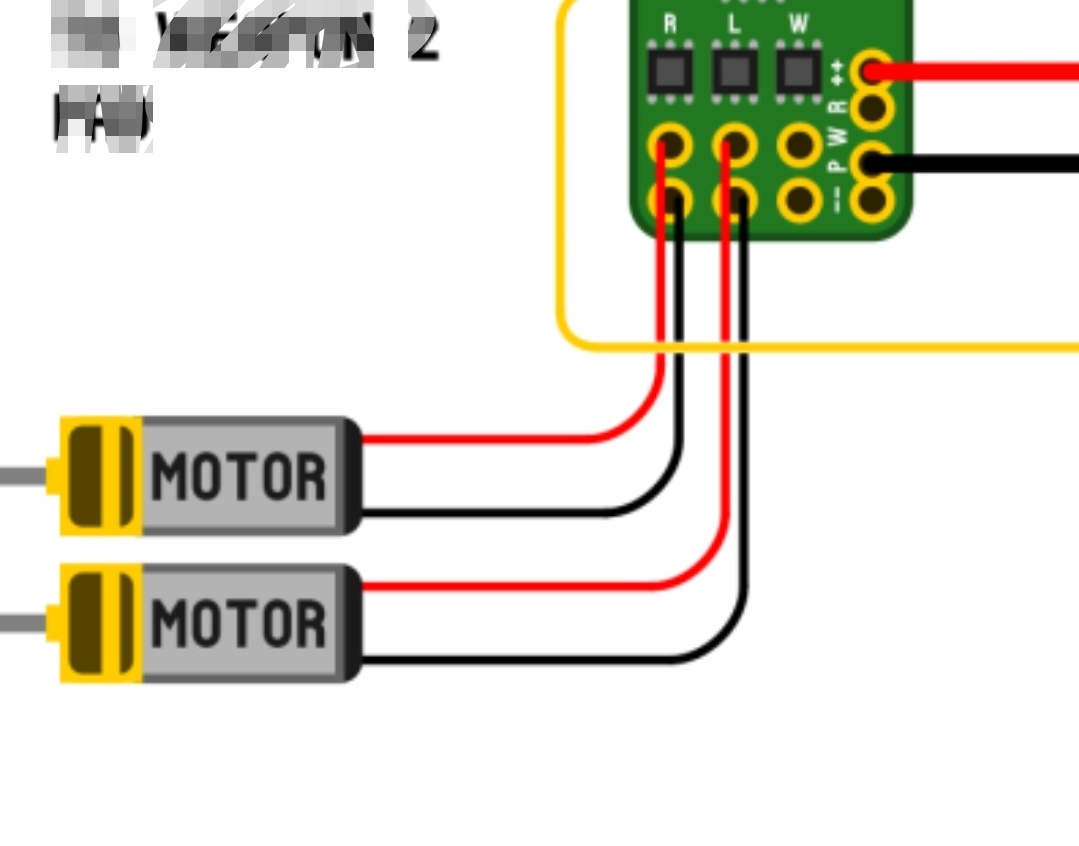
If you follow Steve’s guide here that will fix any issues with the motors being wired incorrectly: Tank Steering Setup Diagram