I’m not sure if this is the quite right place for this, but I can’t find a better one.
On the way back from North Down Havok I made a diagram to help with setting up a robot’s motors to drive correctly, and I figured I should get around to sharing it instead of sitting on it forever. ![]()
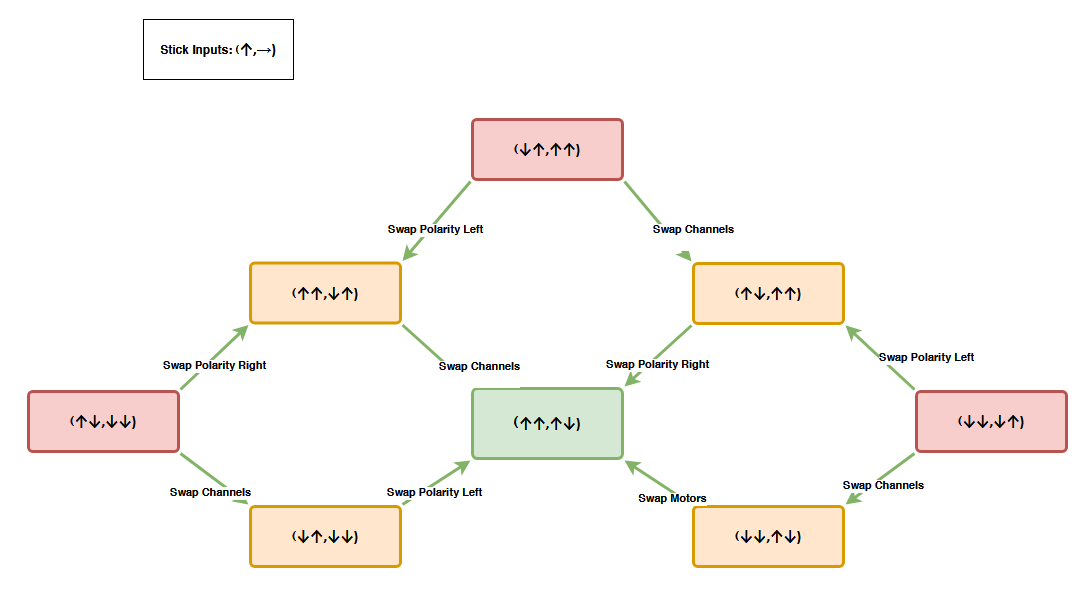
Here we go:
This diagram assumes a few things:
- You’ve already turned on mixing and both motors are moving
- The motors move the same way when you press the stick in one axis and opposite ways when you move it in the other axis
- Everything you’re doing is after the mixer (i.e. on the motor wiring after a Malenki or a BBB Dual ESC).
- Your motors are mounted facing opposite directions (i.e. the bot is a standard setup with motor shafts pointing outwards).
Your Malenki, ESC, or other device doesn’t know how your motors are mounted on the robot or which way they spin for a given polarity, so the final bit of setup is usually to get things setup so the motors do the right things with the outputs from your ESCs.
Depending on setup some of this might be easier to do on your transmitter, but at the same time it’s nice to leave your transmitter settings on default and that way all your robots will likely work on a borrowed transmitter without a bunch of messing around.
There are three basic operations you can do if one or more motors turn the wrong way:
- Swap Polarity (Side) - swap the wires around on one motor (easier at the motor end usually) - this will reverse just that motor
- Swap Channels - swap the motors between outputs - this will change how the robot behaves when you steer but will not change the forwards/backwards behaviour (if you kept the same polarity)
- Swap Motors - swap the motors physcially from left to right on the robot - this will retain the steering behaviour but reverse forwards and backwards because each motor has been rotated 180 degrees as well as being switched from side to side
To use the diagram:
- Turn on the robot
- Push the stick fowards and make a note of what both motors do
- Push the stick right and make a note of what the motors do
- Turn off the robot
- Find the node on the diagram that represents which way the motors turn
- Find the arrow that points towards the green box in the centre of the diagram and apply the change shown on the arrow
- Turn on the robot and check that the behaviour matches the box at the other end of the arrow
- Repeat if you’re not at the green box yet
With separate ESCs you can Swap Channels by switching the motors between receiver channels which is probably easier than rewiring the motors. On a BBB dual ESC or other dual ESC with mixing you can also swap the receiver channels around which will have the effect of swapping the steering and non-steering axis.
Hope this is useful to someone, and if you spot any errors or omissions please let me know. ![]()