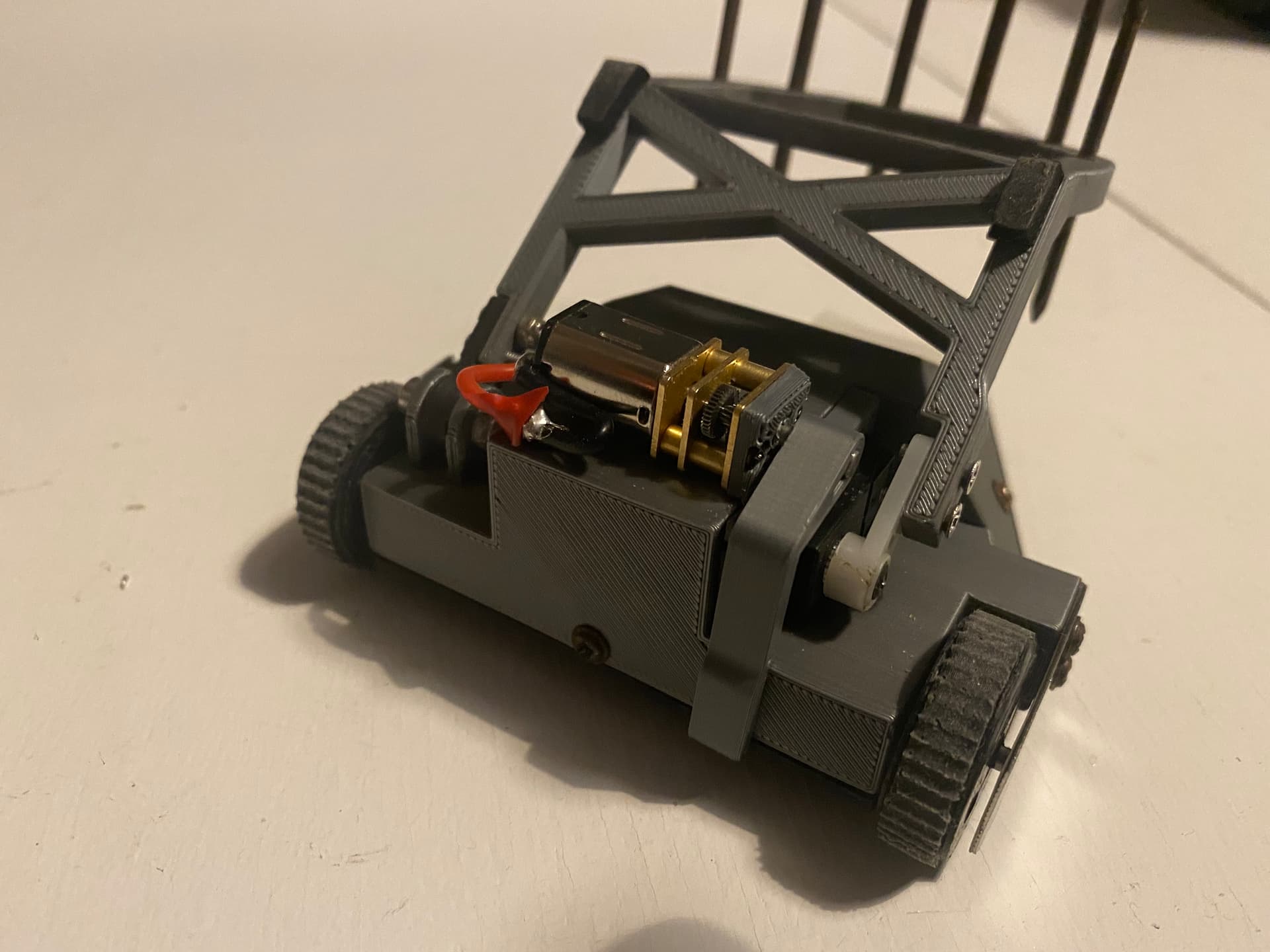
Hello all I’m working on a new wedge bot, blitz
I’m looking for the smallest and most lightweight way to just flip the bot back over as there are lots of flippers in the ant class!
Anything helps!
Thanks,
Hollis
Hello all I’m working on a new wedge bot, blitz
I’m looking for the smallest and most lightweight way to just flip the bot back over as there are lots of flippers in the ant class!
Anything helps!
Thanks,
Hollis
Simplest and arguably best is making it invertible. Is there anything stopping you from doing this?
Otherwise you’re looking at a small servo - or if you’re using a malenki nano you could use a high reduction n20 or n10 on the 3rd motor driver
An N20 with an arm attached to it can do in a pinch, if you design it right you can keep the weight down a lot.
I mean I could make it invertable but I don’t fancy having to drive with me going forward and the robot going backwards and all that…. Technically the bot can drive upside down currently it’s just that obviously the wedgy fork things would be facing upwards so wouldn’t perform well. Also I’m planning on maybe having this ready to go to rock and robots on the 14th of December and I don’t really want to put a bunch of effort into redesigning it to make it just as good on both sides. But yes, invertability is one of the options I will have to go with I think so thanks harry
2 more questions,
Can I run a third motor with the bbb ant esc and receiver from bbb or is a malenki nano required
What rpm n10 n20 motor do I use and do you maybe know where to get it? Like what motor is the one on your photo Liam?
I believe you can run a third motor using one of the standalone small red escs - though I may be wrong there.
HOWEVER, from my experience having an inverted wedge bot isn’t actually too bad, as you’re still able to drive it okay with a little thought, and that is enough for you to get over to a wall / arena flipper / opponent etc. to flip yourself back upright.
Depending on your transmitter, or if you are using a malenki, there is also ways you can set up a switch on your transmitter to invert your inputs, allowing for normal driving when inverted just by quickly flipping said switch - which is what I’ve found works best.
Thanks rob
I think I’m just going to have another motor to act as a self righter please correct me if this is an incredibly bad idea but I think this is what I’m choosing (thanks everyone for the suggestions) maybe in the future I’ll make it so it’s just as good on both sides…
Anyway, main question I have now:
Do you know what motor I should choose and where can I get it
At that point is it worth considering just adding a servo so you can use the self righter as a lifter too? So it’s not just weight on one niche usecase
I guess that now would probably be the best option now.
It would mean that I have to probably make the bot bigger to fit a mechanism for the lifter…
I think I should use the slightly less powerful servo from bbb as it only really needs to turn itself (and other robots probably) over and it’s almost 2x lighter then.
I’m using a Pololu HP 6V 250:1 120RPM micro gearmotor. Basically a N20 with a lot of torque (so much that it can break itself if you stall it too long/often).
Ooh I might use this actually,
Does this work with the bbb esc and bbb reciever?
Or… I have a day of school tomorrow so I might just make it just as good upside down…
You will need a separate single channel ESC to control it.
Servo or just making it run both ways up gets my vote.
Yeah I’ve had some thought and I think that I’m just going to make it run both ways.
Thanks everyone so much for the suggestions ![]()
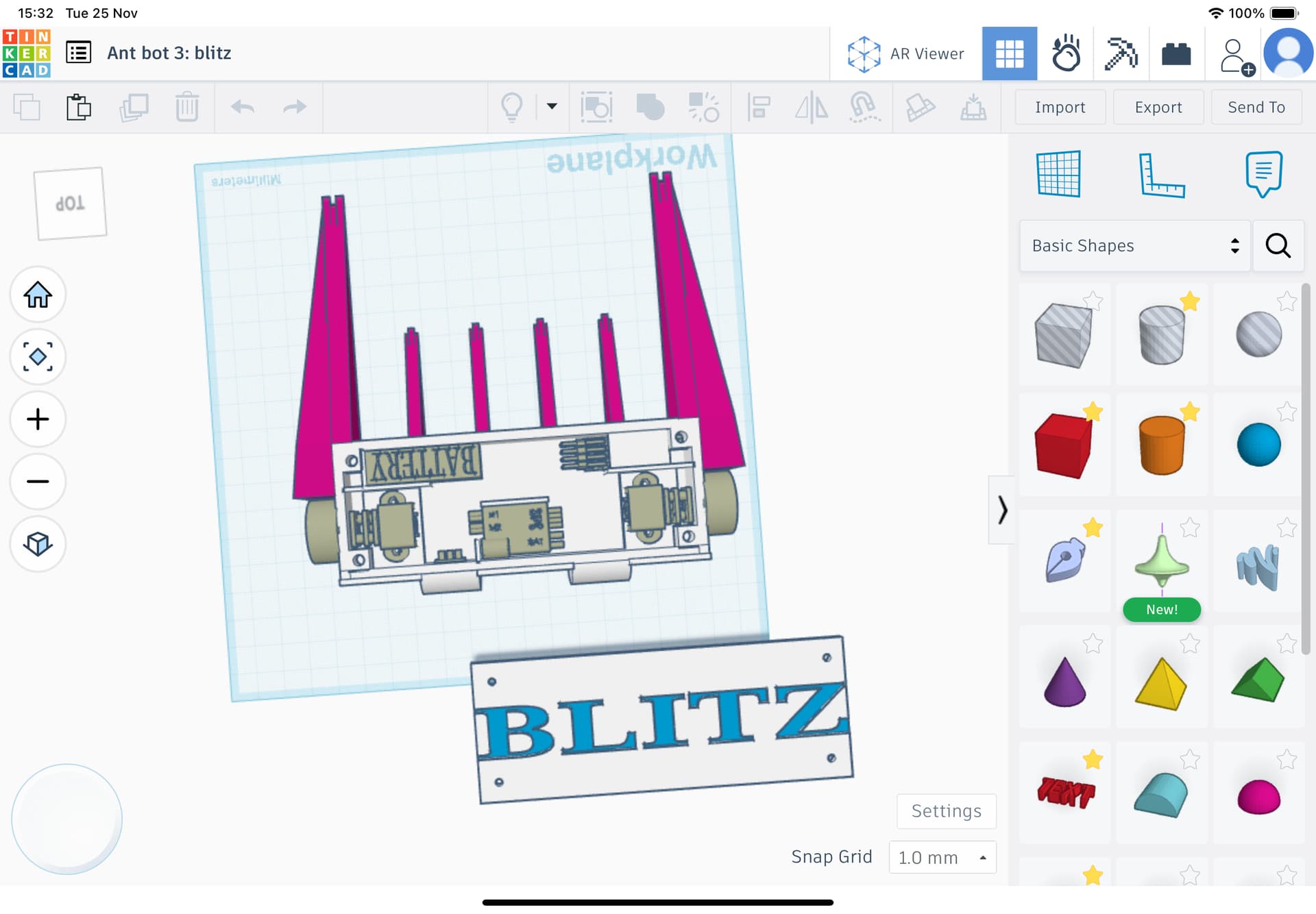
Ok I have finished designing (I think)
I tried printing but some of it folded up and was catching on nozzle thing
Does anyone know why this happens and how to fix it?
Is the issue that your print is lifting off the bed while printing and it’s being knocked off?
Can you tell us what printer it is, what material, what the print bed is and temps for nozzle and bed? Do you need to use rafts often?
What it sounds like could be a solution is leveling (and potentially cleaning) the printbed in order to get a better first layer which is going to stay in place much better and not have this knock on effect.
Ok so I’m currently using a bambu labs a1 (with ams)
Overture pla plus (green)
Print bed is a bambu textured PEI plate
I have never used rafts before
It’s a 0.4 diameter nozzle (don’t know if that helps)
So it says on bambu studio that the plate intitial and other layers is 65 degrees Celsius
It also says the the nozzle temp is initial layer:220 and other layers: 220
My dad says it’s a moisture issue and a filament dryer is arriving tomorrow do you think that is the problem
Thanks,
Hollis
While a filament dryer is a really useful thing to have, PLA you don’t really have to dry, though it will help print quality and when you do have filaments like TPU that drying is essential for, it’s going to come in handy. Dry filament will help bed adhesion. I’d give your bed a good clean and slow the speed right down, for the first few layers at least.
I think I will just give the bed a good clean first because I think I haven’t done it for a while and for all the prints I’ve done I’ve never had to change the settings…
Thanks for the advice harry!
Hollis
If you’re using a malenki nano as the controller then assigning a TX switch to channel 5 allows you to flip the controls if you’re inverted. (I use this on Gen. Grievous and the original Ti wedge cluster)
it’s a great way to manage inverted driving quickly and easily.
So if I’m not using a malenki nano (which it’s not setup to do right now) there Is no way of inverting drive then?
Thanks Ben
Hollis
There have been other products in the past that allow for inverting.
https://www.fingertechrobotics.com/proddetail.php?prod=ft-tinyMixer
But for what’s available right now, unless you have a very high-end transmitter that allows for a very high level of customization, you’re going to need a Malenki Nano.
That or flip your transmitter back to front and rotate it 180 degrees, that might work.