So Luchador went to BBB Beetle Champs recently and… it went rather well!
Like 1st place well! 
With the major spoiler out the way lets talk about the beetle for a bit.
I’m not going to do a full play-by-play description of my fights - because frankly what is the point!? - video will do that a million times better than any waffly words could, so if you want to see my run/fights checkout my event edit on my team page here: https://fb.watch/otsZw6abmc/
Instead of describing the fights I’ll concentrate on talking about the robot itself, my intentions and insights that watching them might not give!
Overview
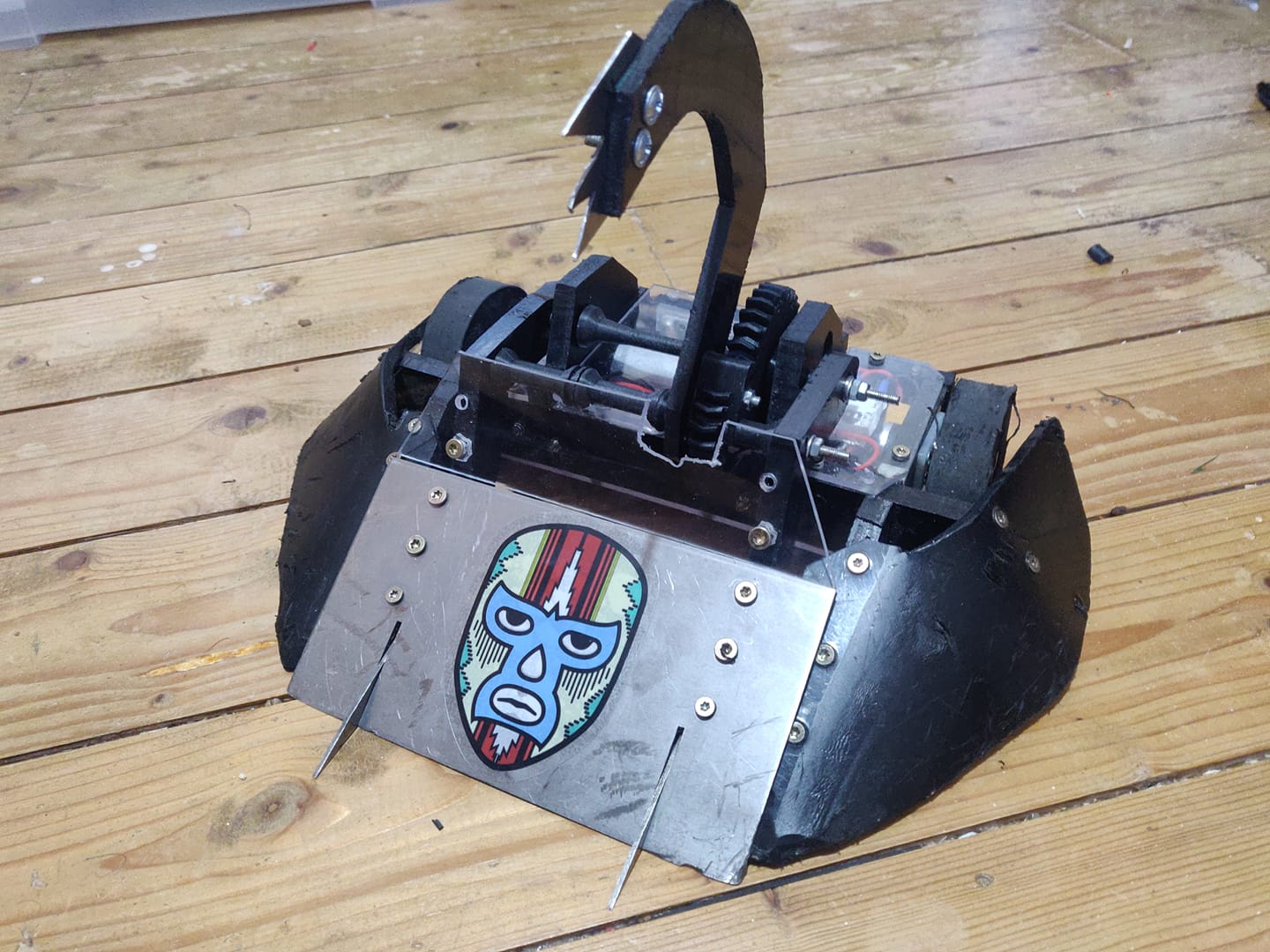
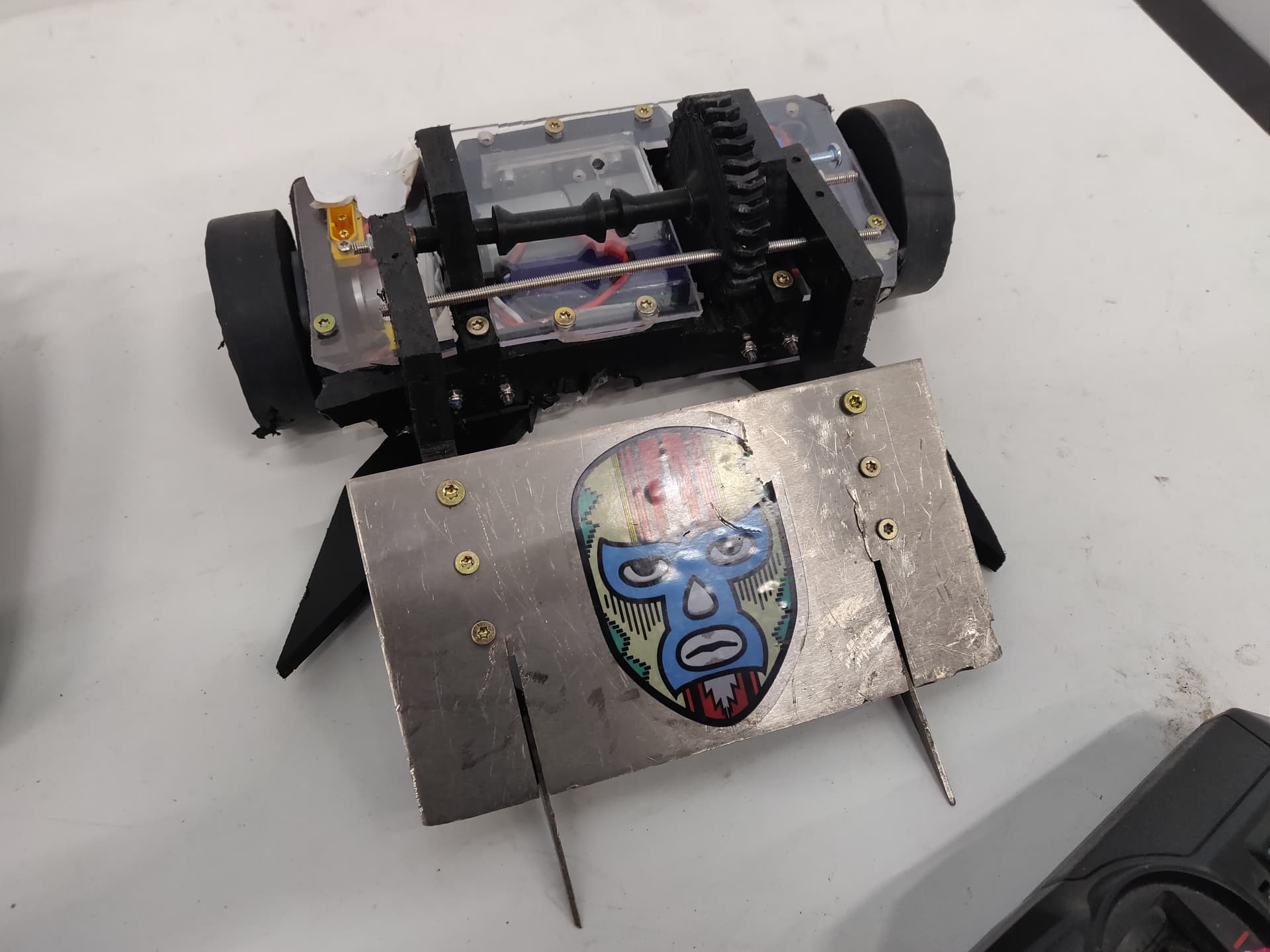
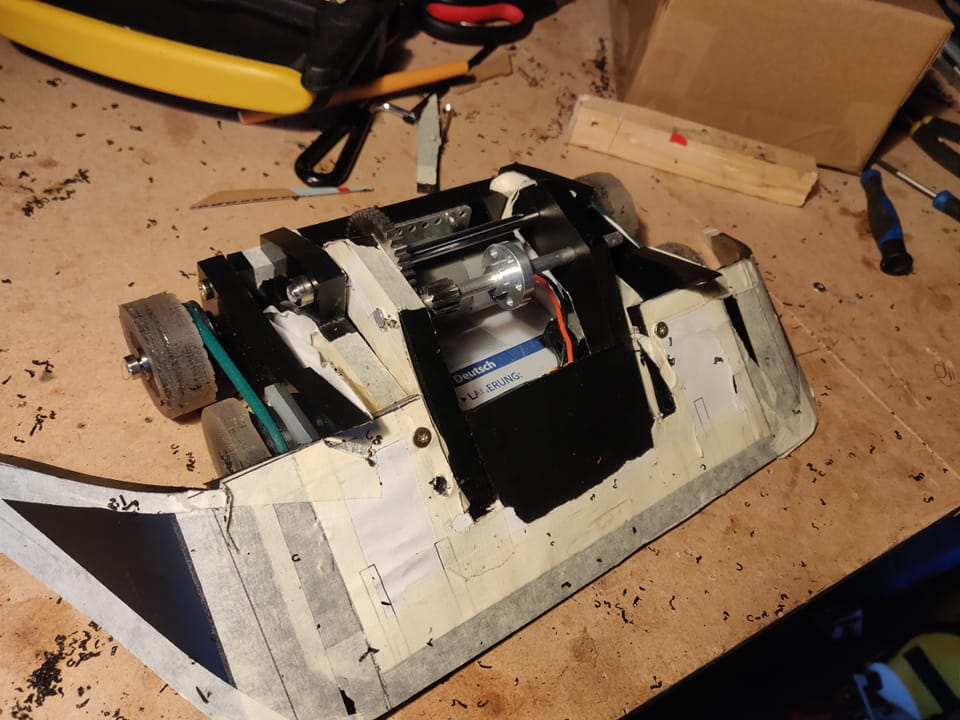
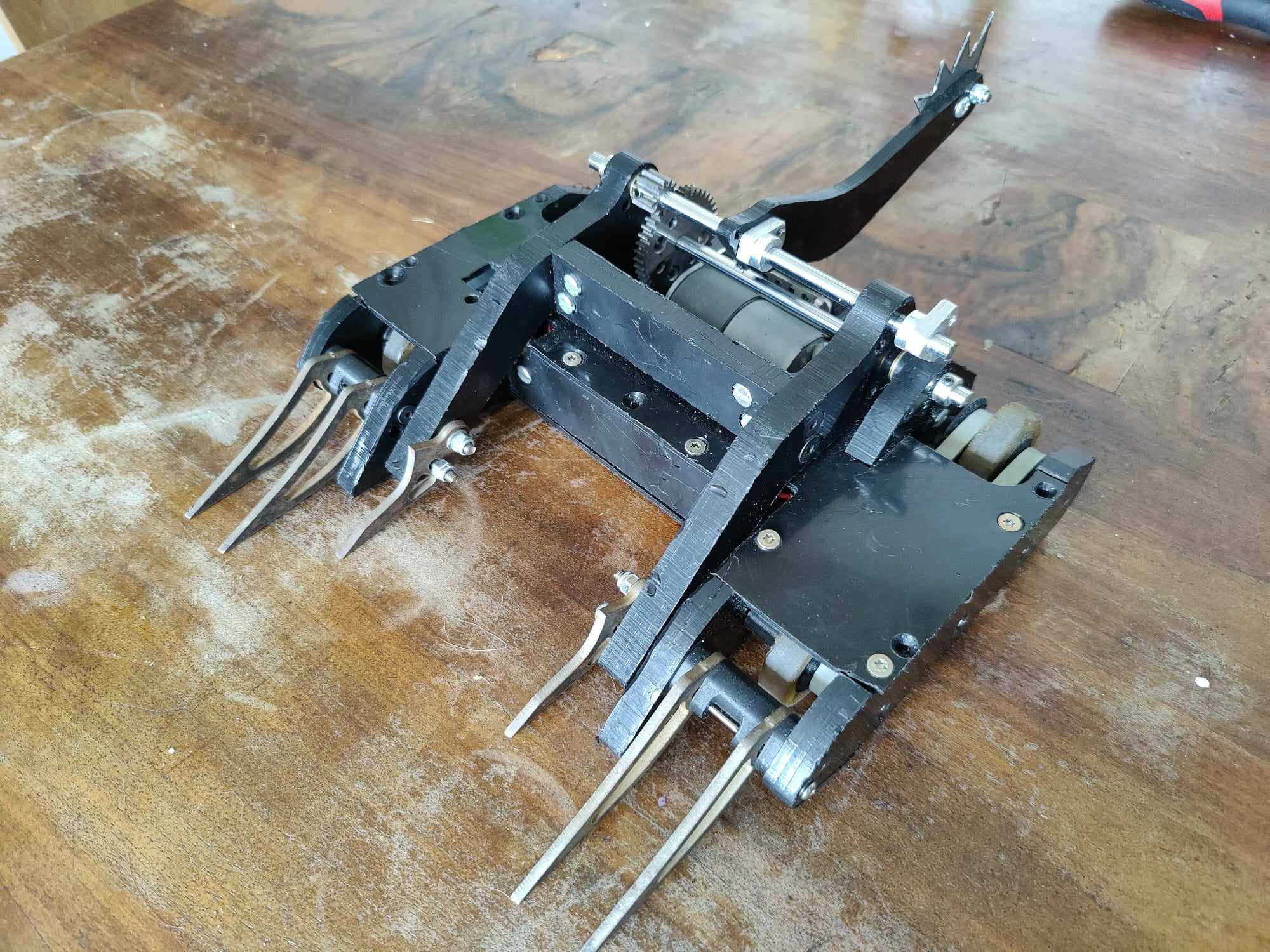
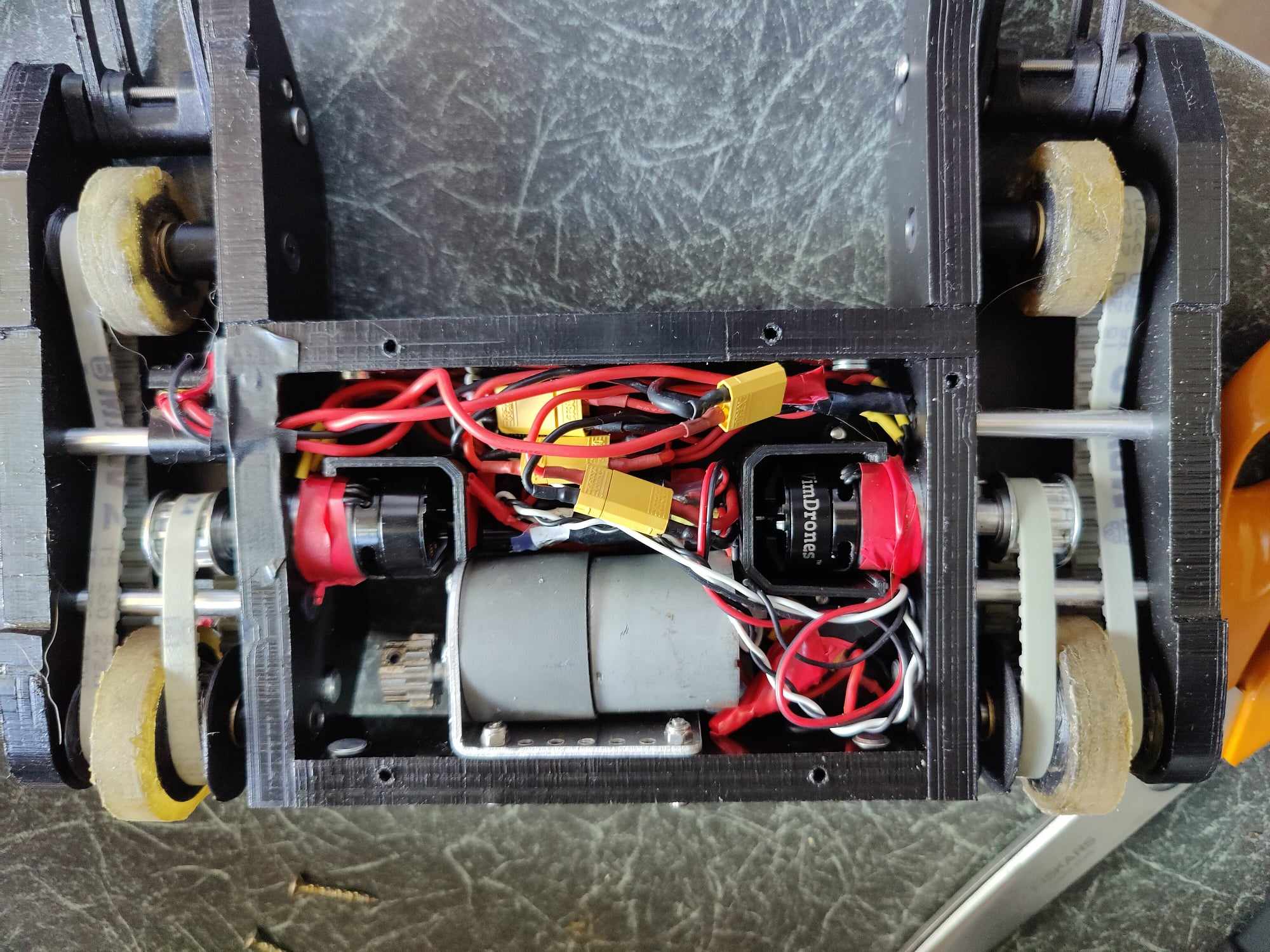
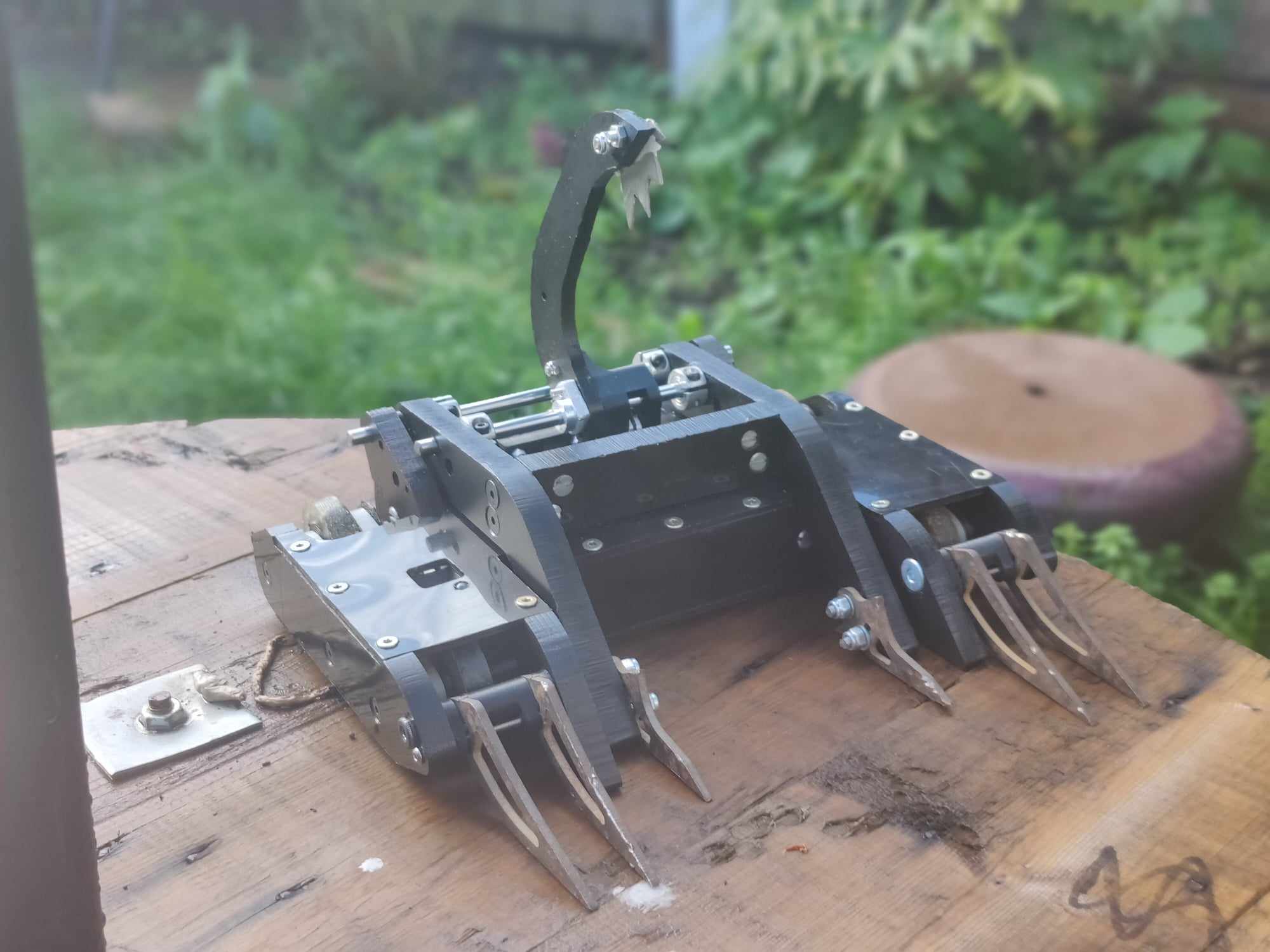
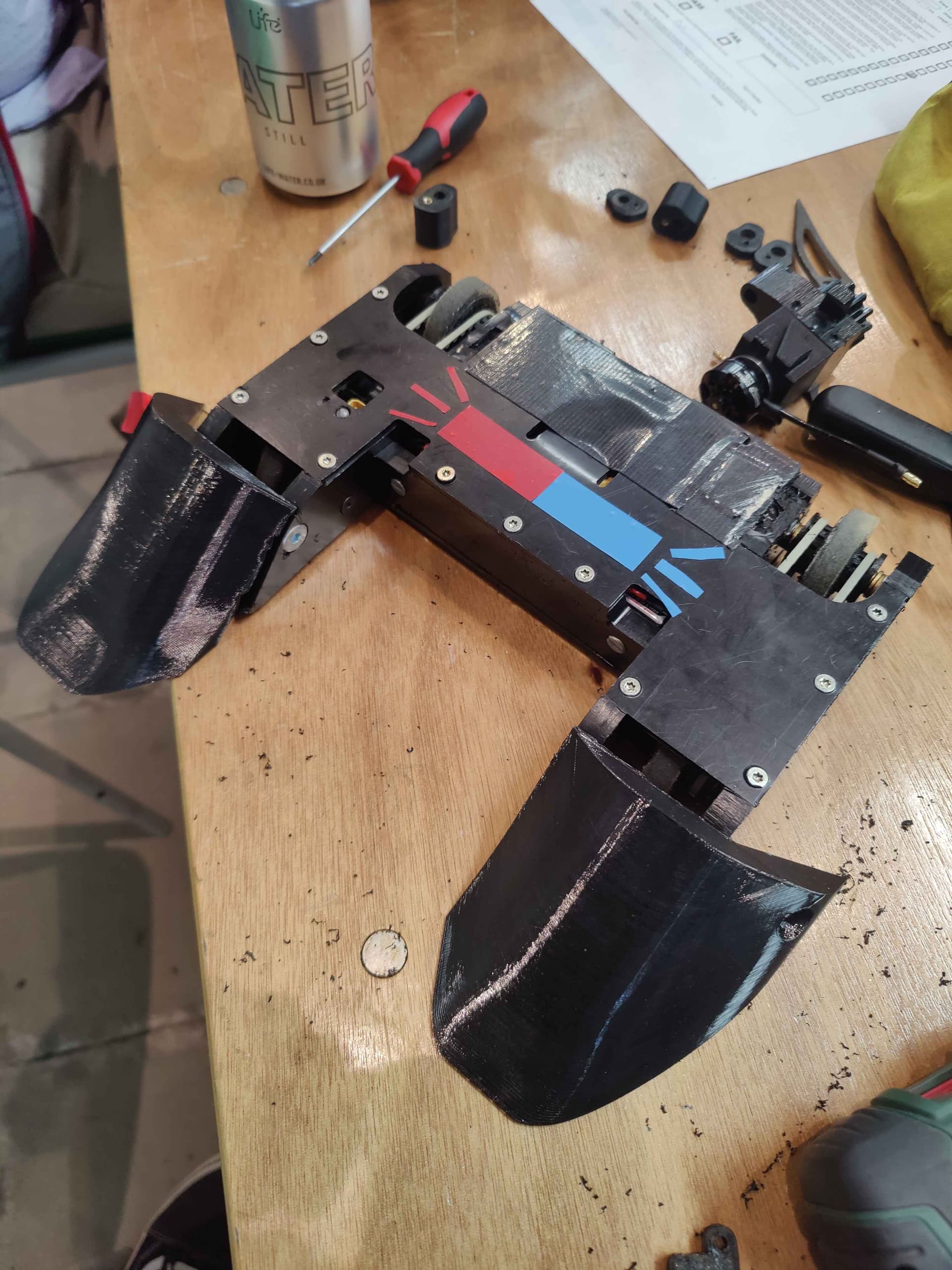
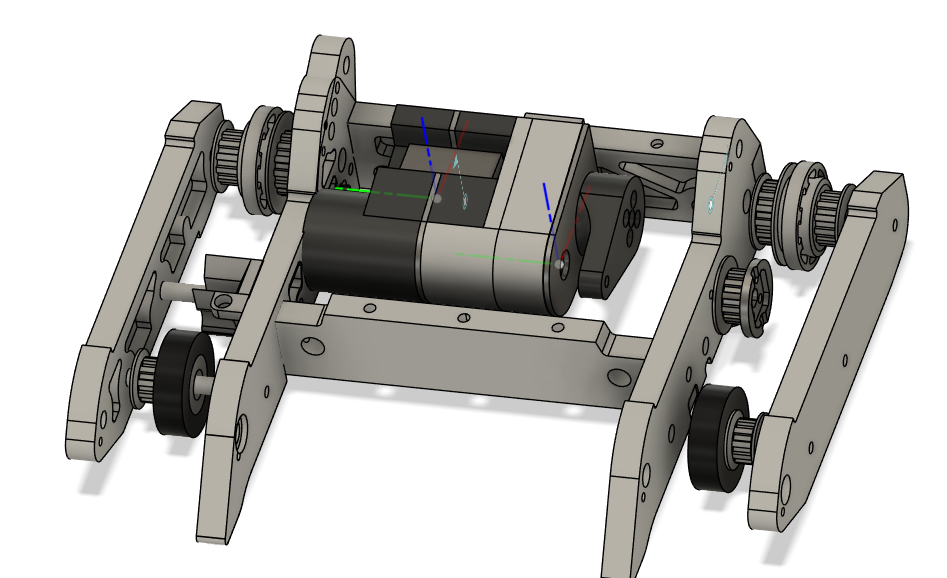
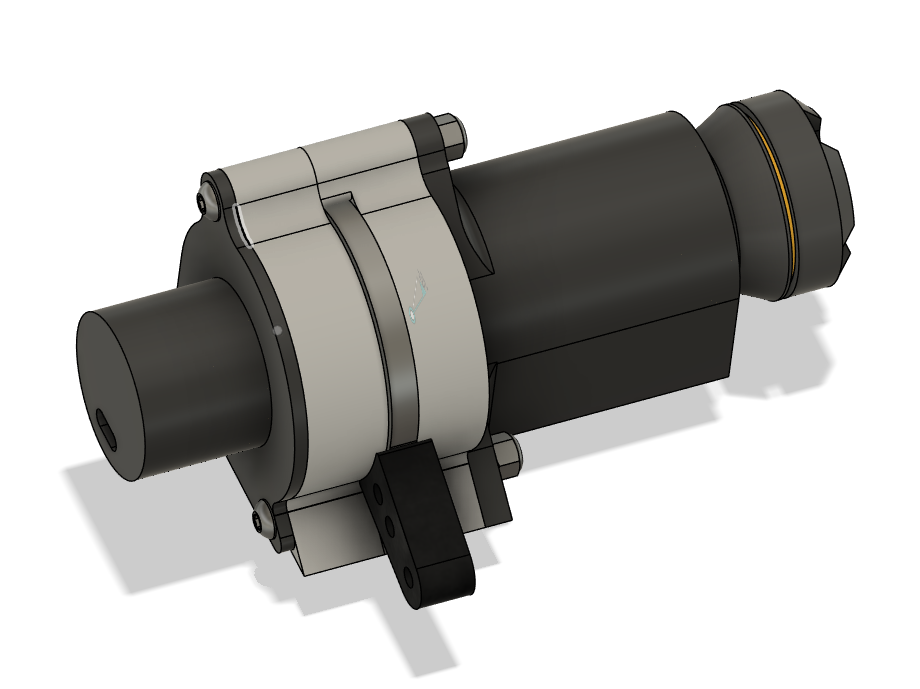
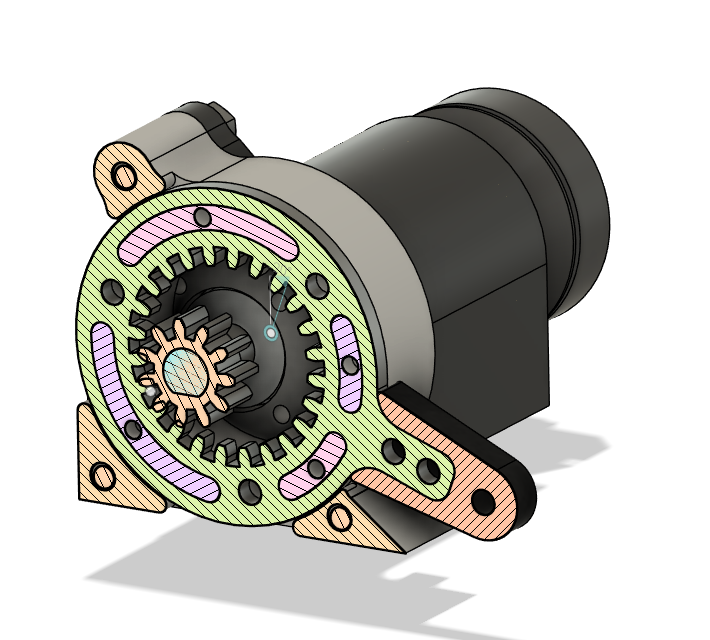
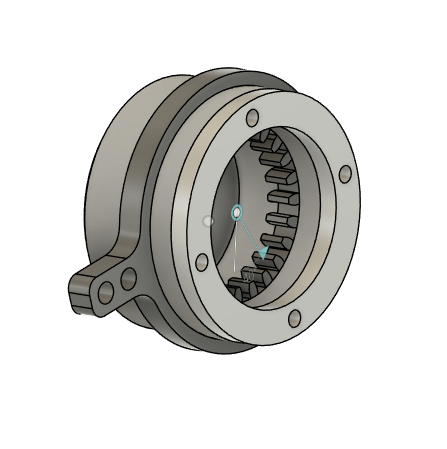
Luchador last competed at Champs 2022 and it remained largely unchanged going into this event- it was the same fundamental design and the same actual chassis from last year. This lack of major overhaul did allow me to focus on smaller quality of life tweaks - I revised the mounting for the forks to be easier to change, added a nice link door, made a new horizontal set up, new internal motor guards - those sort of things.
This was a strange experience for me - I’ve never really returned to an old bot before - always iterating pretty intensively and fielding a new version most events. During the event prep I lost count of the times I found myself muttering “what idiot designed this!?” 
As the event approached I went in feeling reasonably confident that the bot would perform well - this version of Luchador was the best its ever been - I had no doubt about that.
I had a bunch of tough fights - some against scary spinners and some we’re just great driving matches - but the bot performed great through out. My TX less so - but we’ll get to that.
Rnd1 3 way: Luchador v Home Improvement v Brugh Deluxe
This was an interesting match up - I knew Home Improvement would be one to watch - Jon-Luke consistently builds really interesting and tough bots. I knew I would have the ground game advantage - so my tactic would be to use that and try and keep them off balance as best I could. This worked initially, however eventually Home Improvement got a hit on me while I was inverted - peeling up a corner of my baseplate which intermittently caused high centering and drive problems - the final nail in this coffin came from me reversing over a seam which caught the peeled baseplate and made it peel further enough that I just had no drive what so ever.
A loss for Luchador and into redemptions we go
Redemption: Luchador v Blast Furnace.
I’m a big fan of Blast Furnace - anyone who double weapons is a king imho. Going into this fight - the lack of destructive weapons in the arena mean I knew it would be a simple driving match - the ideal scenario for Luchador really. This proved to be true and it was great fun and thankfully Luchador came out on top
Round of 32: Luchador vs Sniper
Oh boi what can I say about this fight. I pushed this fight back twice due to what I thought was mystery RX gremlins - Luchador was behaving very strangely during arm up - ignoring stick commands, moving on its own - very strange. Later on after this fight, I found out it was my TX and got Luchador set up on a mates Zorro for the rest of the comp ( Big  to Jed for this), but on the third attempt at starting the fight I decided to just send it - thankfully I regained control partway into the fight and didnt loose it again until I placed my TX on the arena post fight! - could easily have gone differently!
to Jed for this), but on the third attempt at starting the fight I decided to just send it - thankfully I regained control partway into the fight and didnt loose it again until I placed my TX on the arena post fight! - could easily have gone differently!
I was trying out my new anti-horizontal TPU booties/pontoons for this match up, a bit of a unknown and against Dylan’s very scary Sniper (side note: I love this build so much Dylan!). They performed great, tanking hits, flexing to dissipate KE and ablating nicely. This allowed me to tank those first hits and perform quick follow ups - for control and dictate the pace of the fight. Eventually getting a super solid grab and lift on Sniper and suplex-ing him OOTA!
Round of 16: Luchador V Abracagrabra
For the round of 16 I faced Becca and Kat with Abra and the mini bot. I love Abra so much - its such a solid control bot and Becca drives it spectacularly!
Another great driving match with us both getting lifts, pins and shunts on each other. Big shout out to Kat on the mini bot tho - interrupting my only solid Grab N Lift, repeatedly high centering me and generally causing me so much nuisance that I caught myself focusing on the mini bot far more than I should have been!
Eventually I managed to get Abra into the pit and marched on to the rnd of 8.
Round of 8: Luchador v Jackhammer
The fight with Jackhammer was a strong match up for Luchador. Despite only having 3mm HDPE lids, Luchador has its whole lifter protecting anything important- leaving only its link in the drive pods as a vulnerable target for hammersaws really.
They had some long forks that I knew I would need to get around the side of - which I managed to do reasonably regularly. Even got a great moment where I threw my lifter up to parry their hammer saw blow!
Eventually they got inverted and couldnt self right - on to the round of 4! - at this point I dont think I really knew wtf was going on.
Round of 4: Luchador vs EVA02
Into the round of 4 I drew EVA02. As with jackhammer, I wasnt too concerned about the weapon due to Luchador’s design. We also had similarly aggressive front end fork game - so I new this would be a real driving match and hoped that my lifter would make the difference.
Eva managed to get pretty close to my link with one of their shots - If I hadnt added the link door would they have gotten it? 
Eventually I got EVA into the pit and secured my place in the final! - wtf I was fully in shell shocked mode by this point.
Also BIG UP the builder here - second beetle, second event and they’re running this deep into the comp - crazy good!
FINALS: Luchador vs Gizmo
So in the run up to this fight I think my internal monologue was roughly:
“AAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAHHH”
My goal here was to keep my front towards Ellis as much as possible and hope/trust my front end to do its job. To try and get Ellis inverted and keep him there if possible - which didnt really happen.
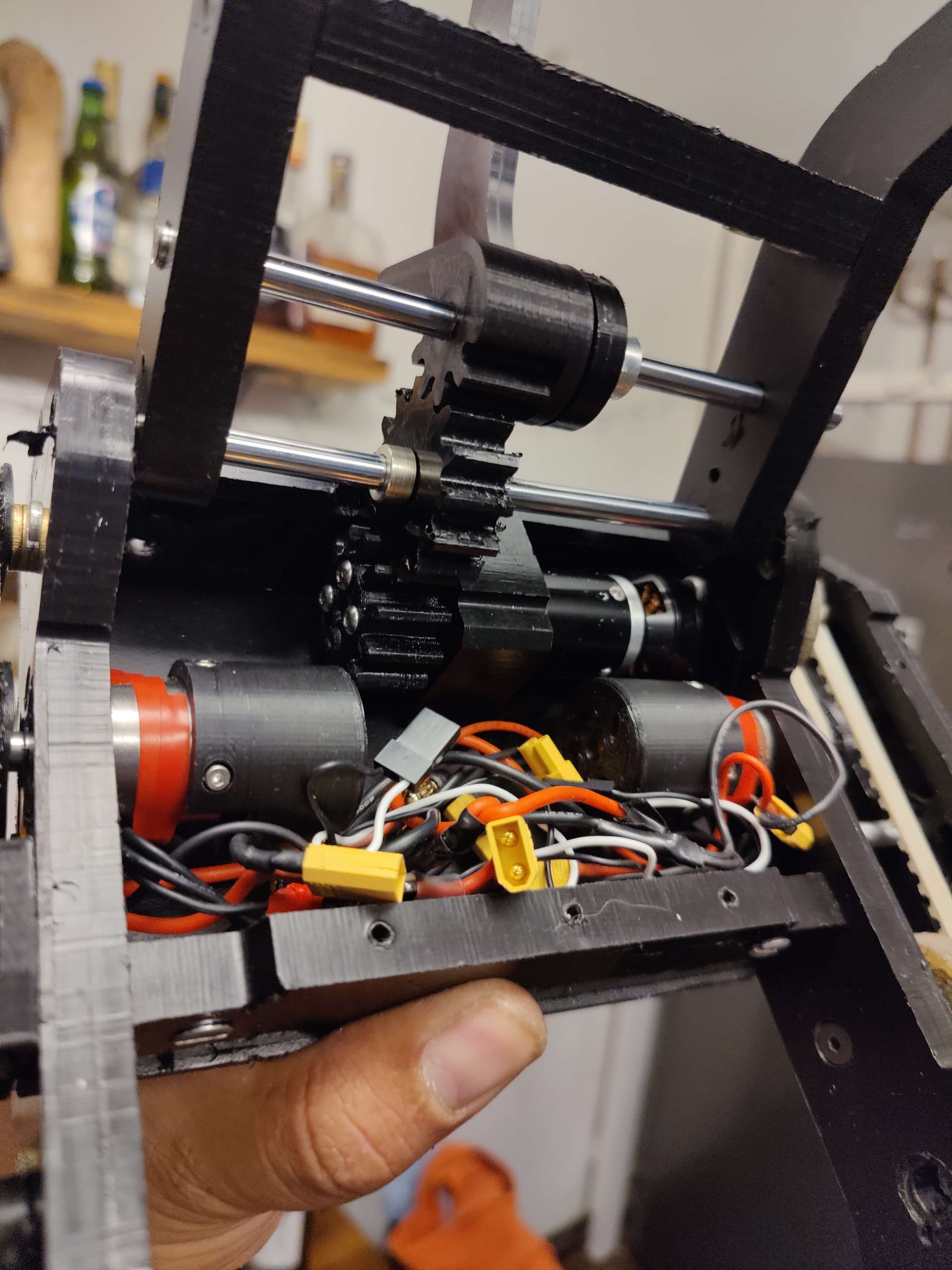
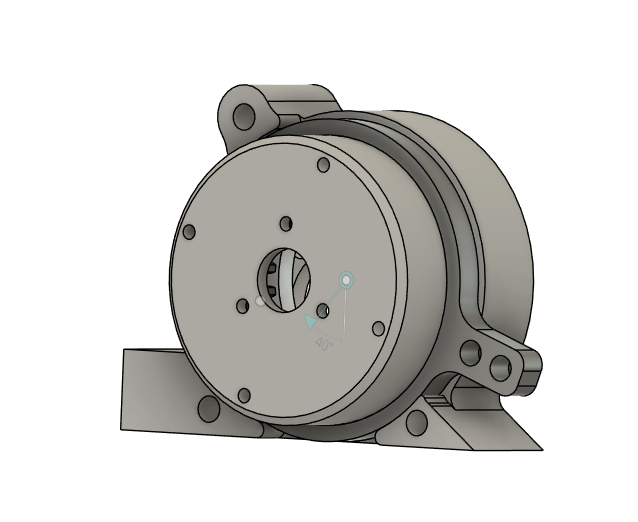
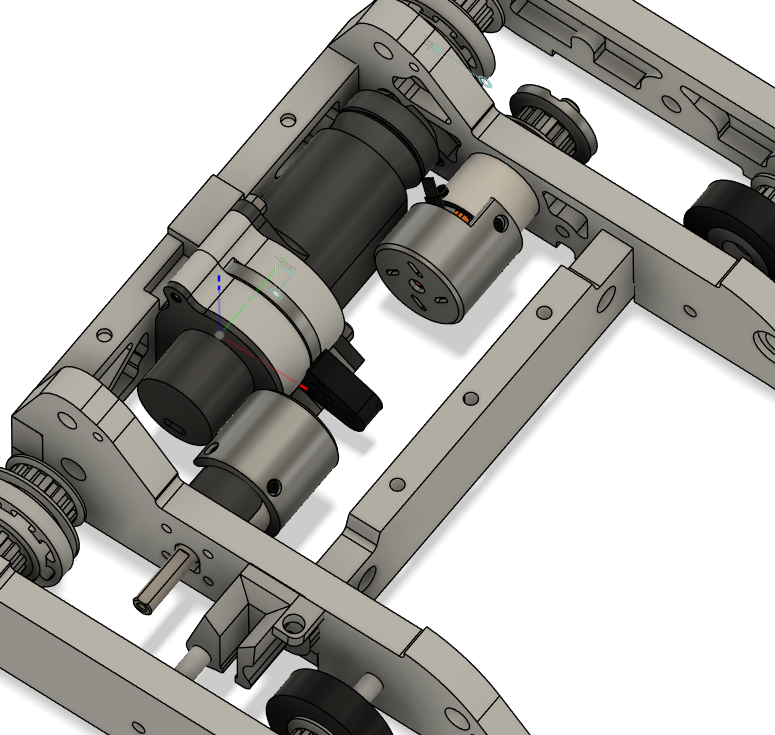
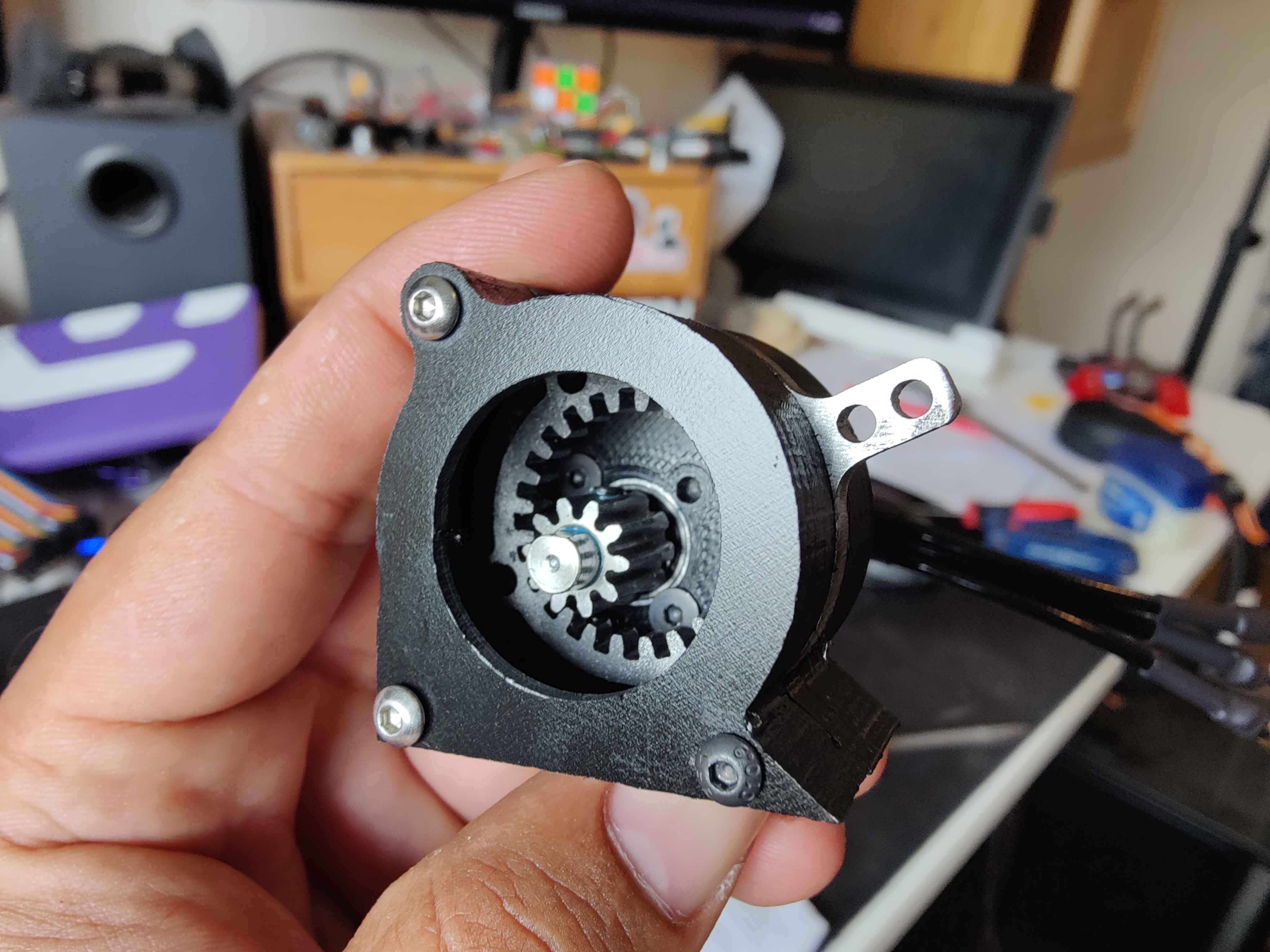
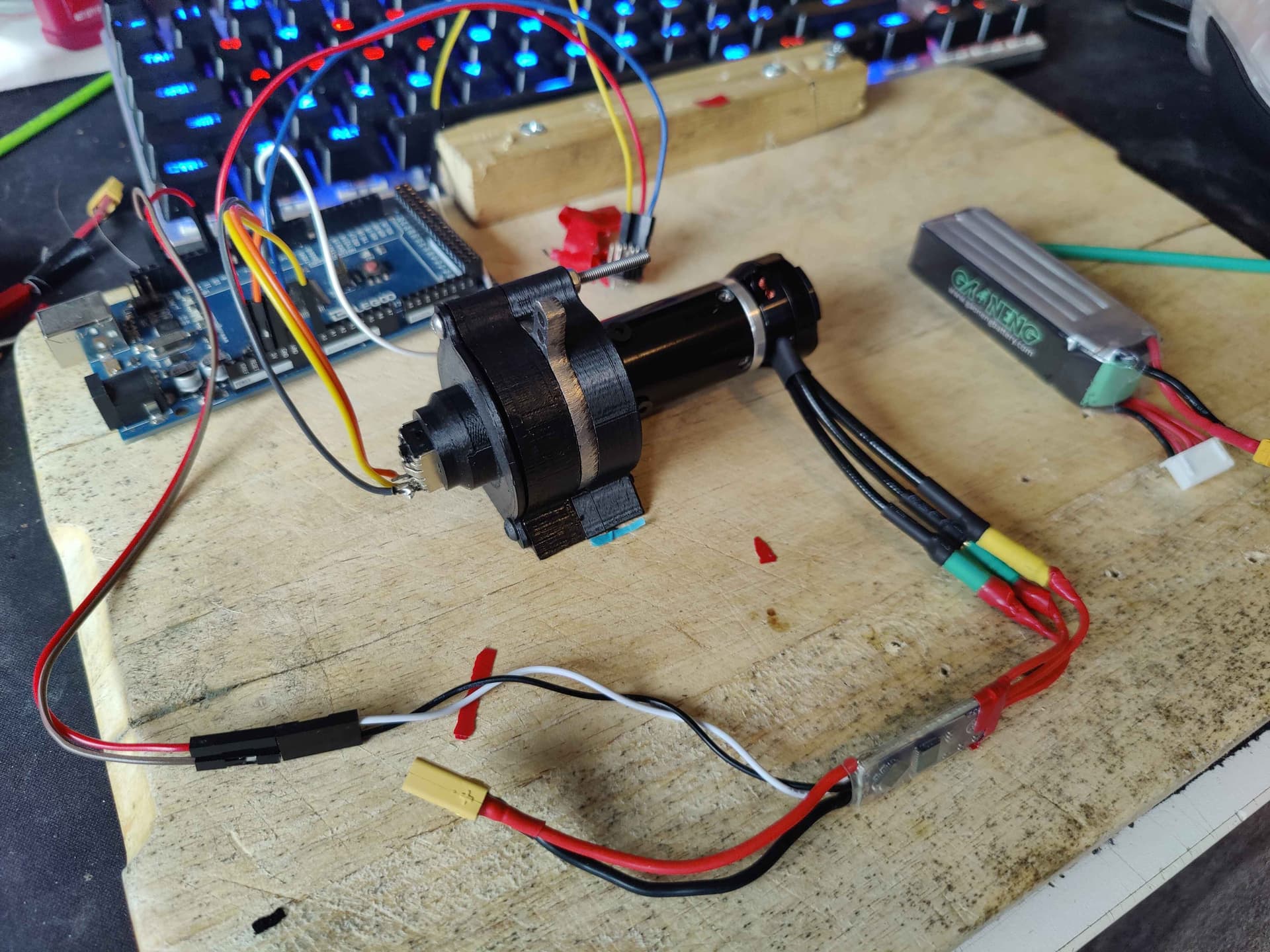
Toward the tail end of the fight I lost a drive side - post event tear down showed this to be the motor coming off the gearbox. I had serviced the gearboxes a couple of weeks prior to the event and neglected to Loctite them. In the few days running up to an event I usually do a full strip down and rebuild with loctite - The Great Loctitening I call it. I didnt loctite during servicing because of this - then come event week I decided to not do it because “the only thing that really needs it is the drive and of course I would have loctited during servicing” - WHOOPS 
I did get a few flips and a suplex in there and held out long enough to get the perfect flip that made Ellis land on his weapon and bounce into the OOTA and take the win! - a super lucky shot/flip!
So what is next for Luchador
I do have some design tweaks to the drive I’d like to do. I would also like to revise the baseplate so it is inset away from the edges of the robot to avoid a repeat of the rnd1 peeling - but I do also have an entire spare chassis’ worth of plastics so will probably hold off on actioning those changes.
instead Luchador will get rebuilt “as-is” with the parts I already have and then take some time off while I focus on TCD and a new thing for a little bit.
As always a big thanks to Joe and Craig at BBB for hosting a great event, David for his tireless efforts running and maintaining the arena and all the volunteer crew for helping make the day happen! And another big thank you for all my opponents and fellow roboteers for attending and being a generally great community!