Right so that’s on the docket for ML-T34. Almost certainly will have one on the retract but I’m not sure getting an end stop on the forward swing is entirely possible or appropriate with things the way they are. When I design an axe from the ground up that will absolutely be a consideration from day dot.
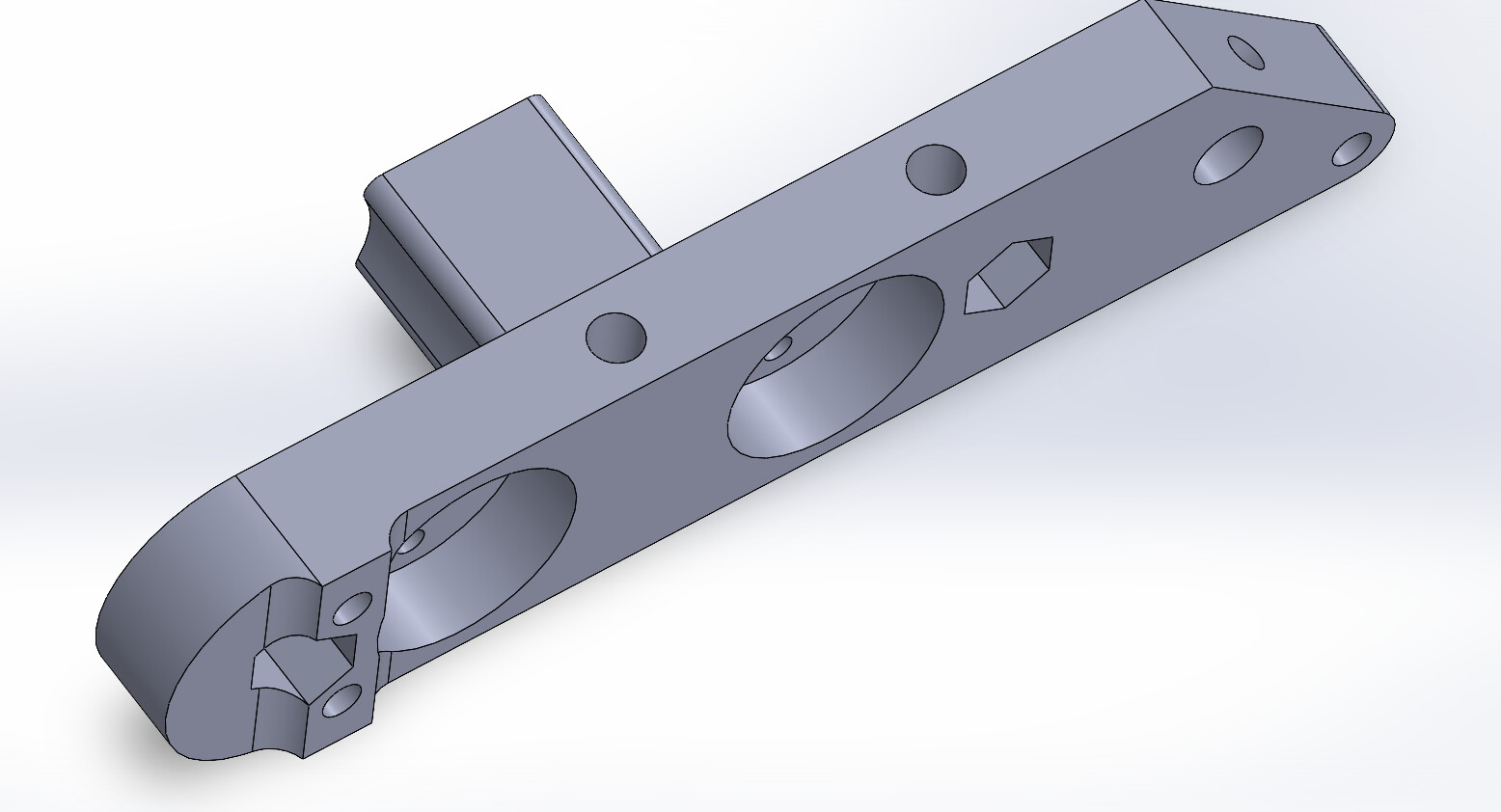
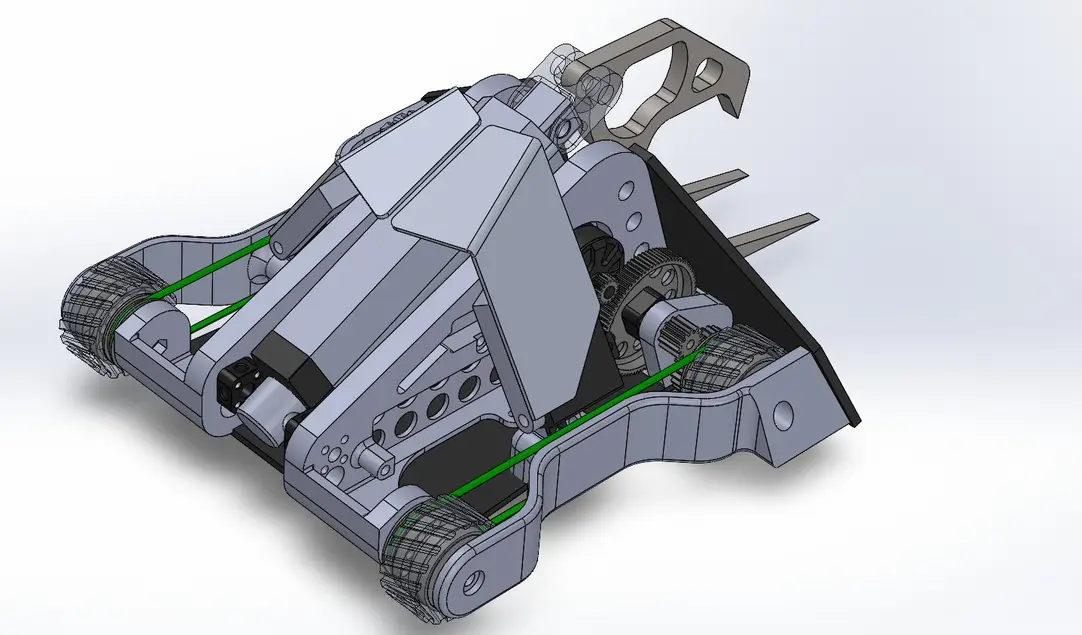
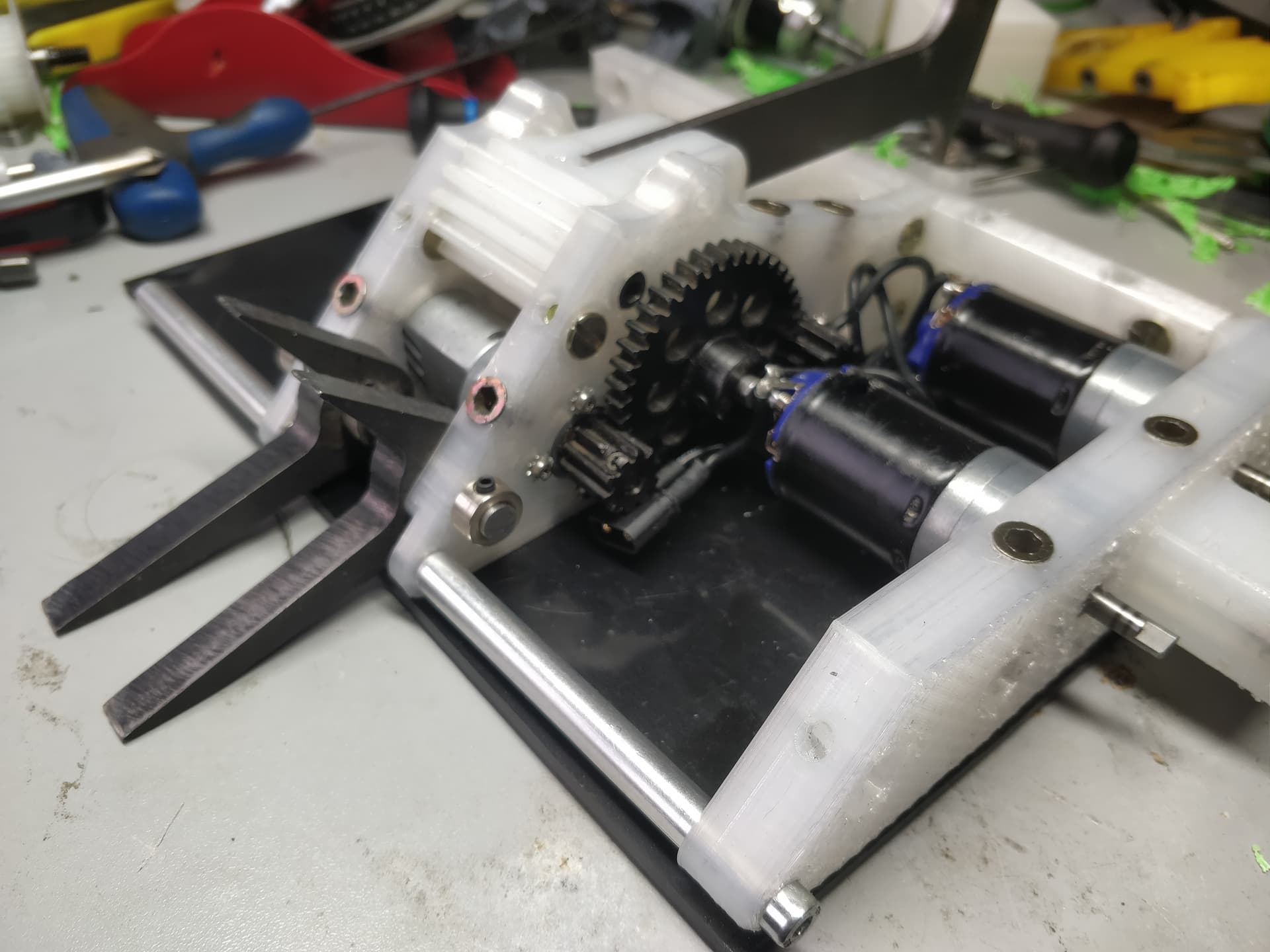
I have another bulkhead to reprint as I had to tweak things slightly to push the width out by a further 6mm so one of the drive motors just clears the boss on the 40t motor spur gear. You may revel in the frighteningly banal nature of the CAD model.
Over Christmas and new years I am going to try and get some more tracks printed, cast and a get a robot driving and chopping with the best of them. From there the aim is going to be to buy the battery I’ve had my eye on and start making templates for HDPE armour.
I put robot stuff loosely to the side for a week as I was in Amsterdam for an end of year jolly. Relevant to this is it ended on a bit of a bum note being stuck for an extra 6-7 hours in Schiphol airport due to reports of Extreme Gustiness. This gave me unfiltered access to several bars, a lot of coffee and Time To Kill.
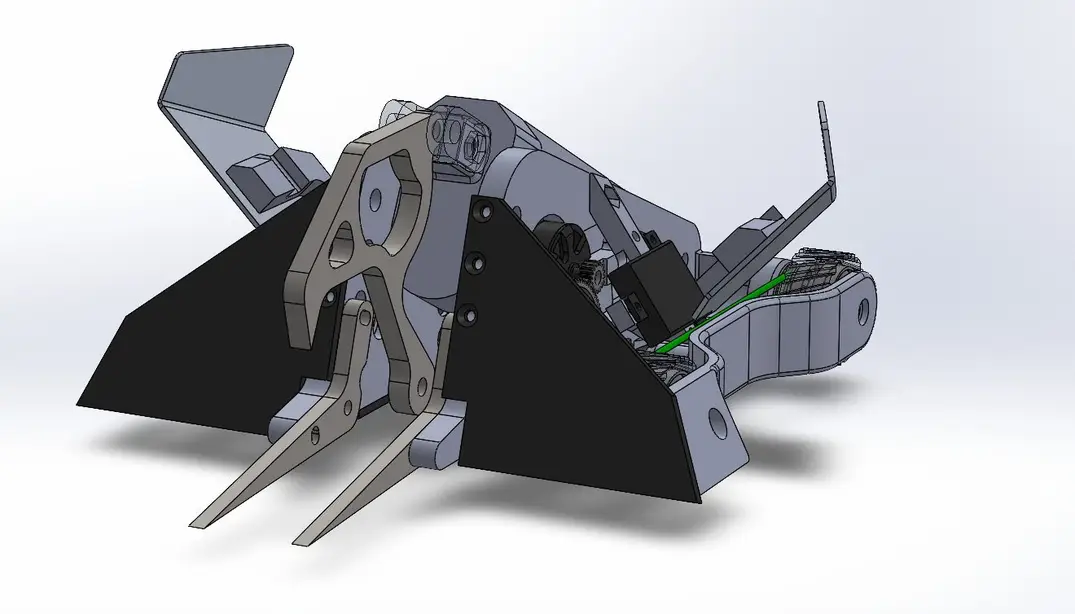
Here is the end result of rattling around in my head unimpeded. It is also a rare glimpse into just how the sausage is made with my awful design discipline. I tend to rack up a bunch of solid blobs into an assembly then just go hard and fast sketching and scribbling all up on them. Morphing them on the fly to get the shape right. I’m always really milquetoast with my designs as they tend to just be boxes dressed up with an angle or two. I am trying to make this a departure from that - semi successful.
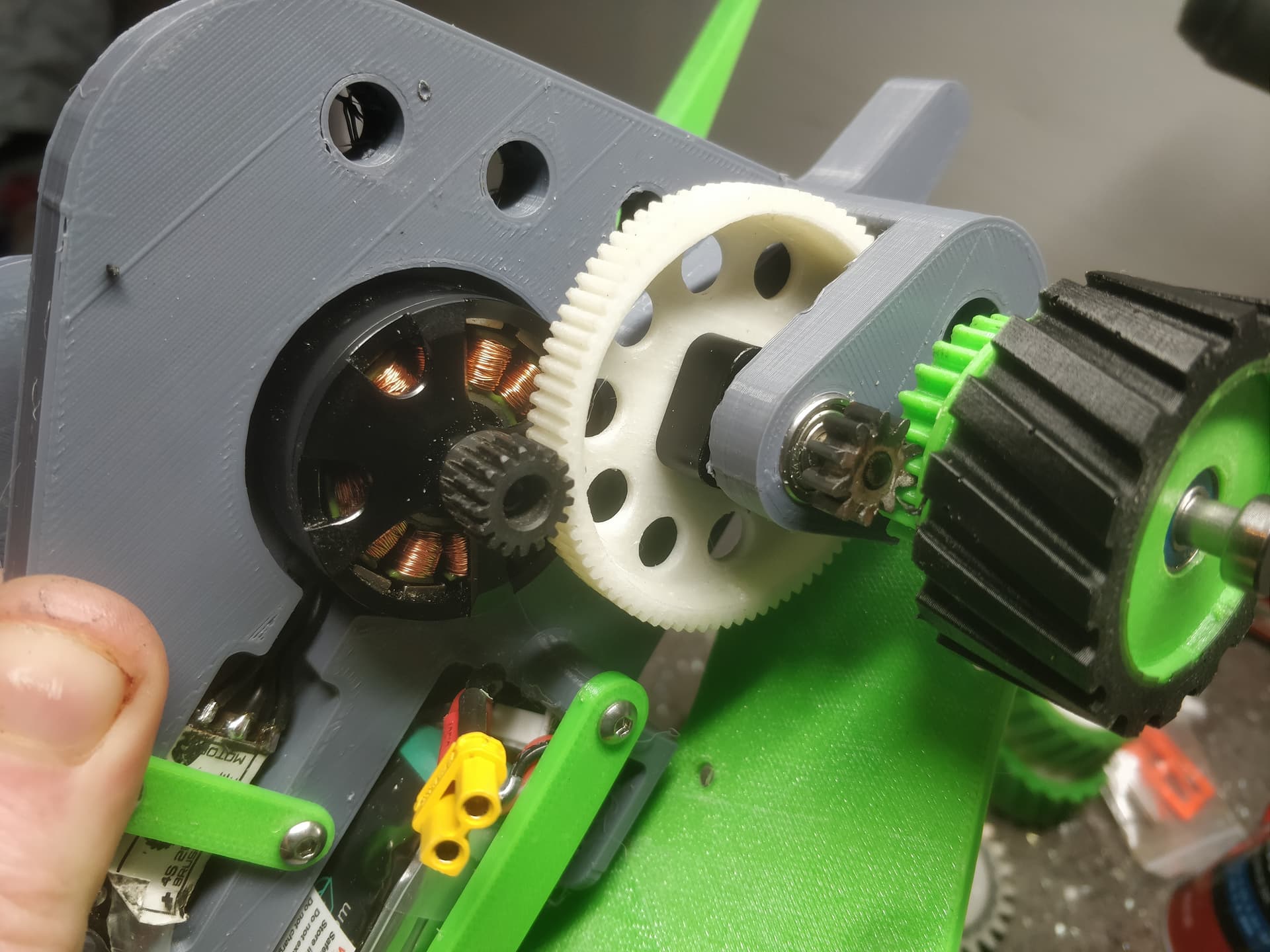
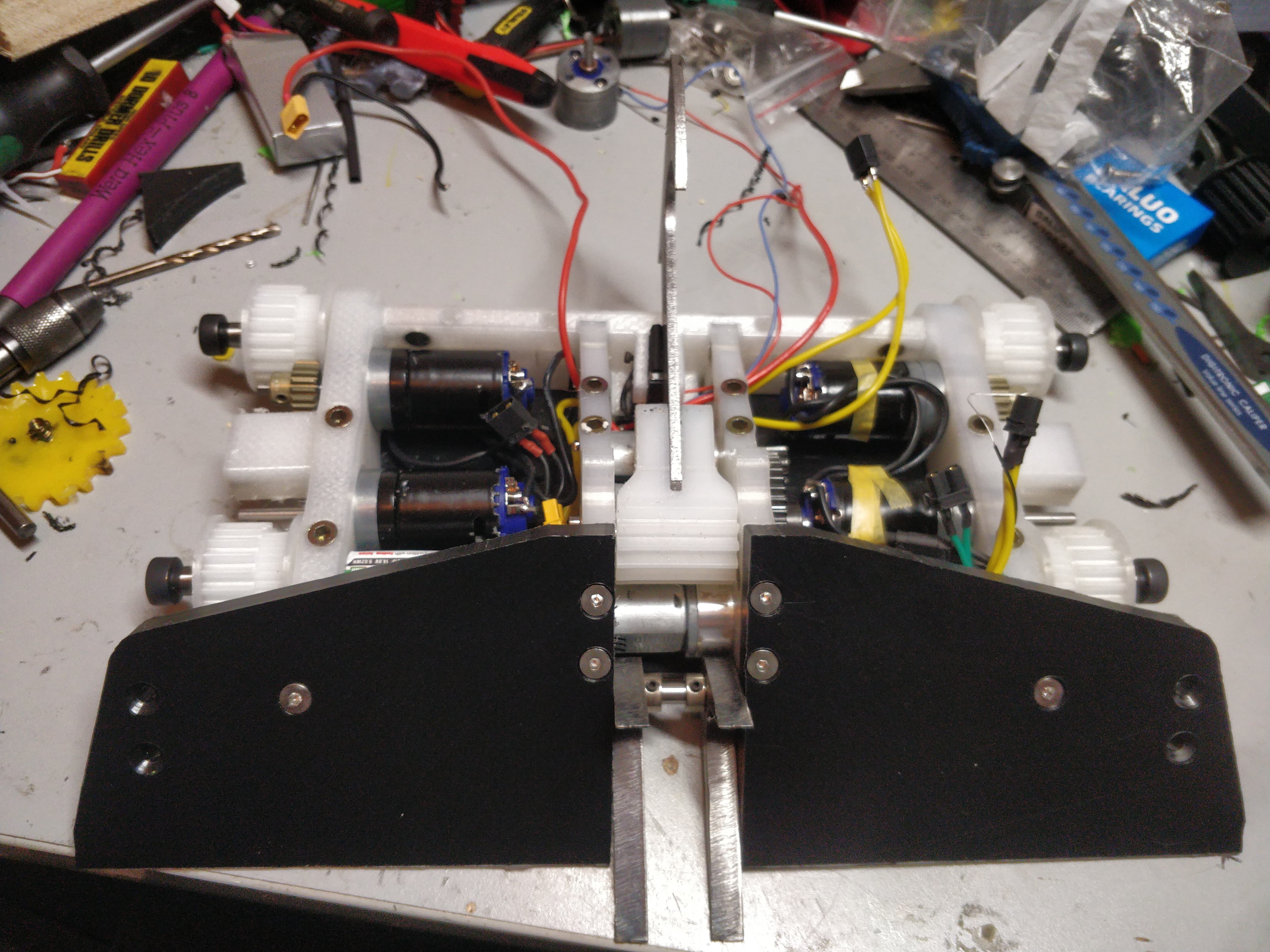
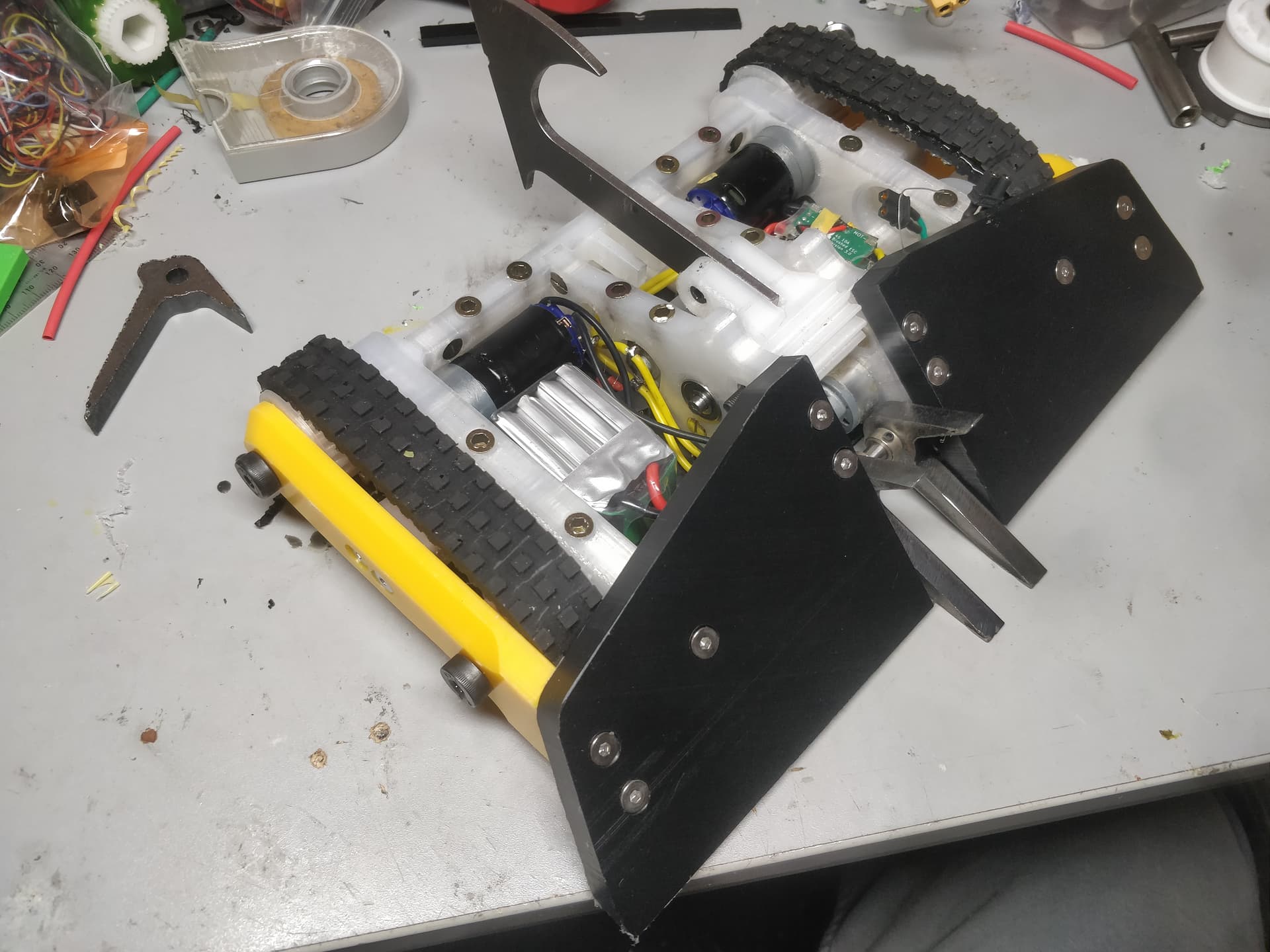
Still a bit of a parts bin special as I am going to try and use up as many parts as possible. This is reusing gears, bolts, bearings and batteries and BBB drive escs from MotherLoaders while also making use of those low kv 35mm outrunners and Klaus wheel moulds. The chassis as it stands is 3 parts, two printed bulkheads and a carbon fibre baseplate.
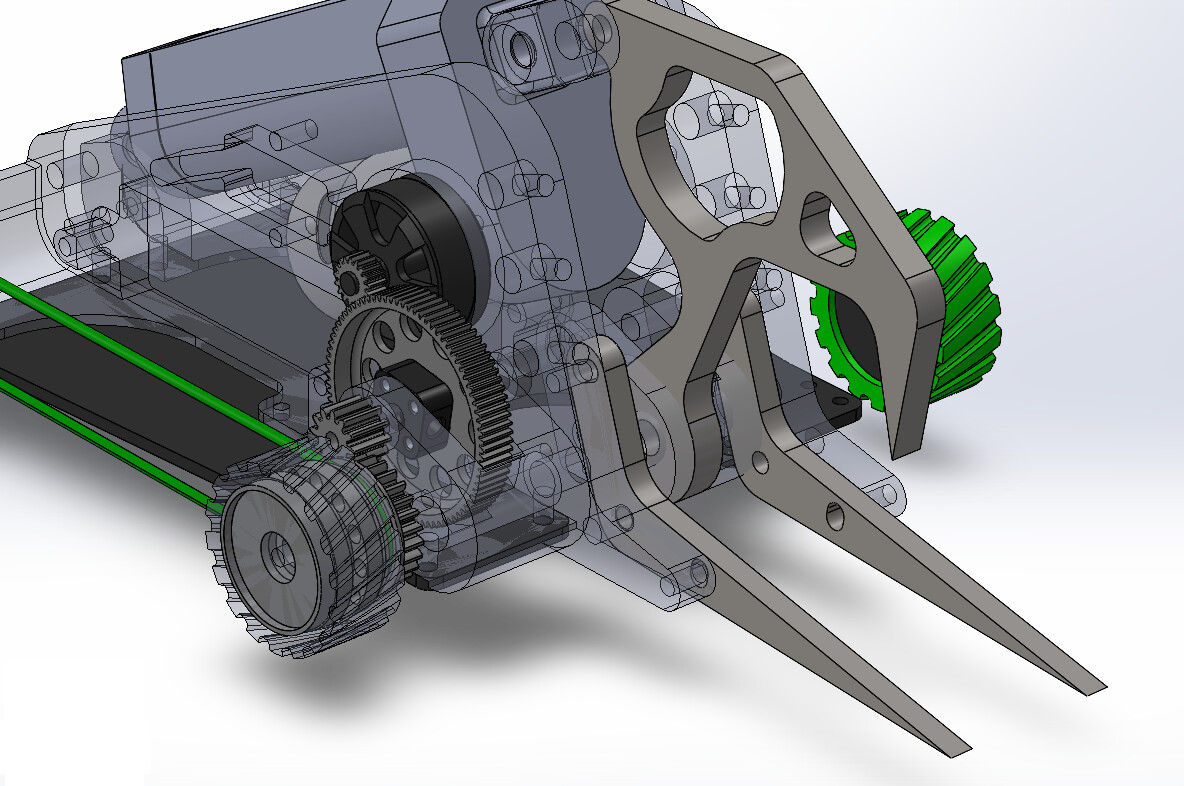
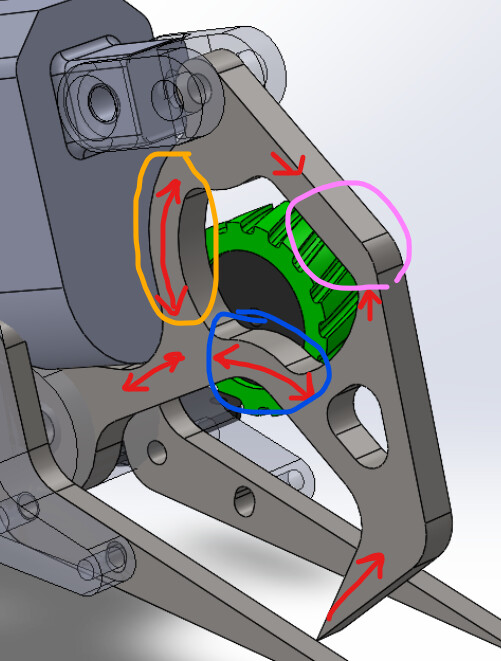
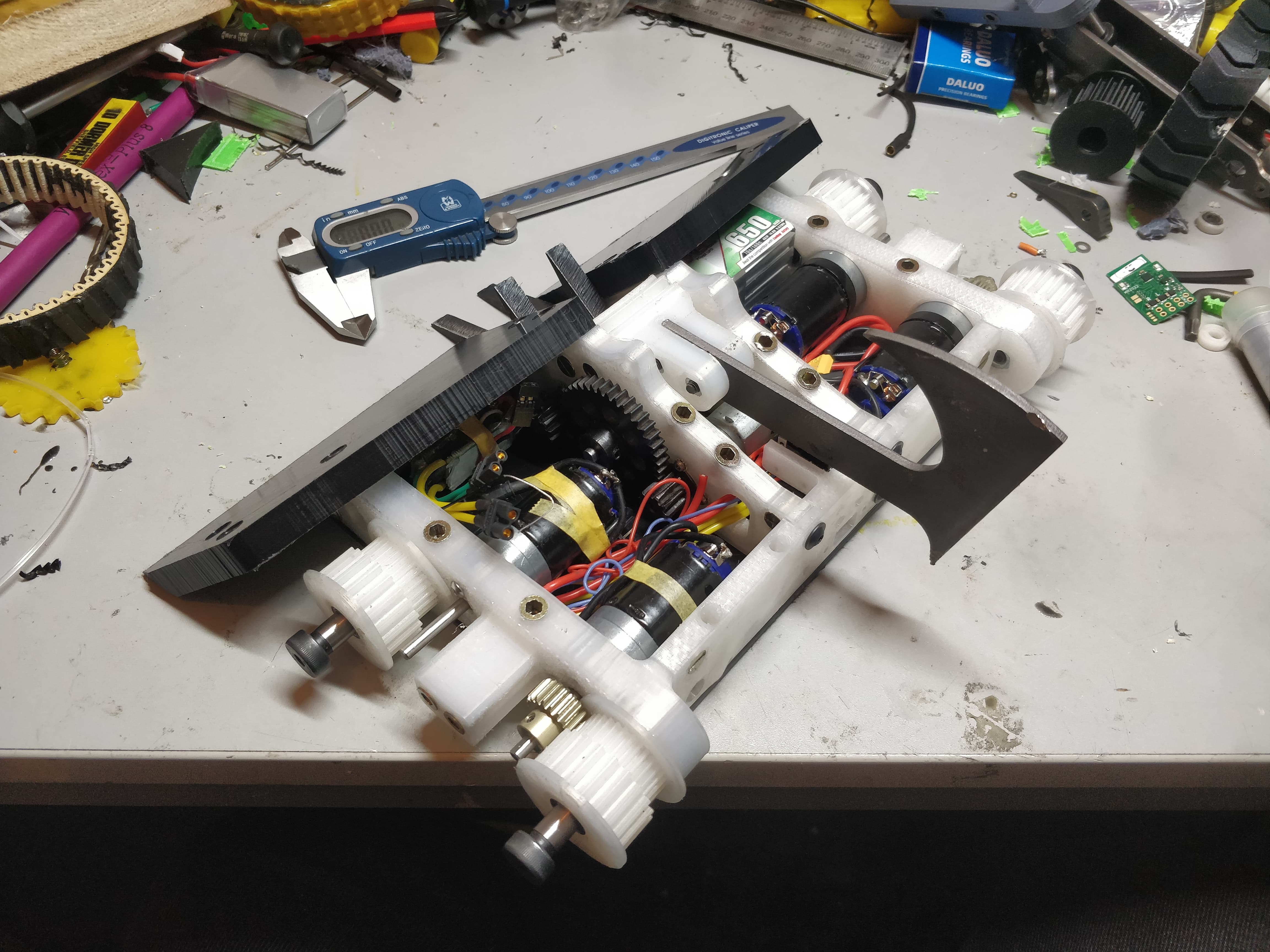
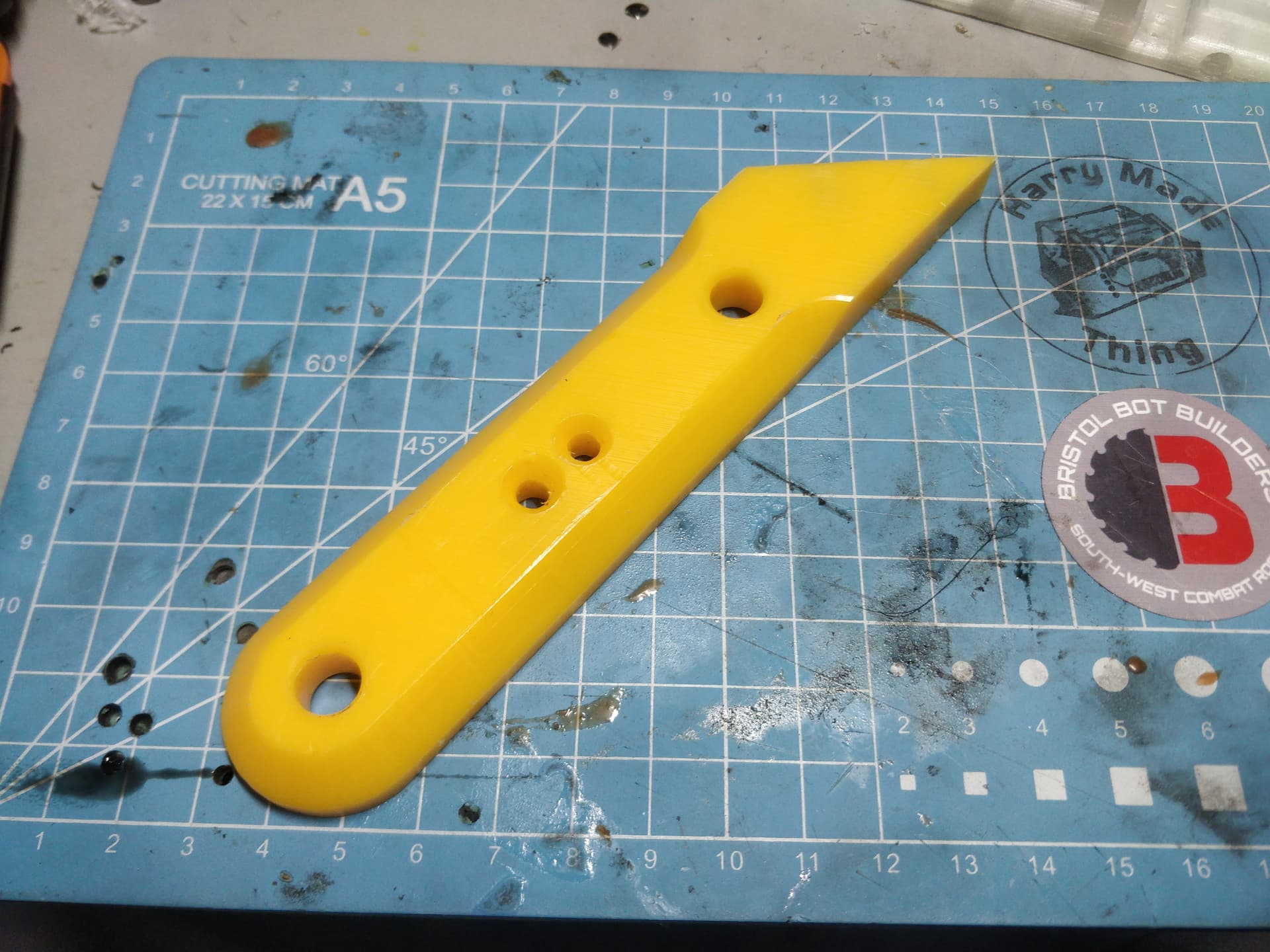
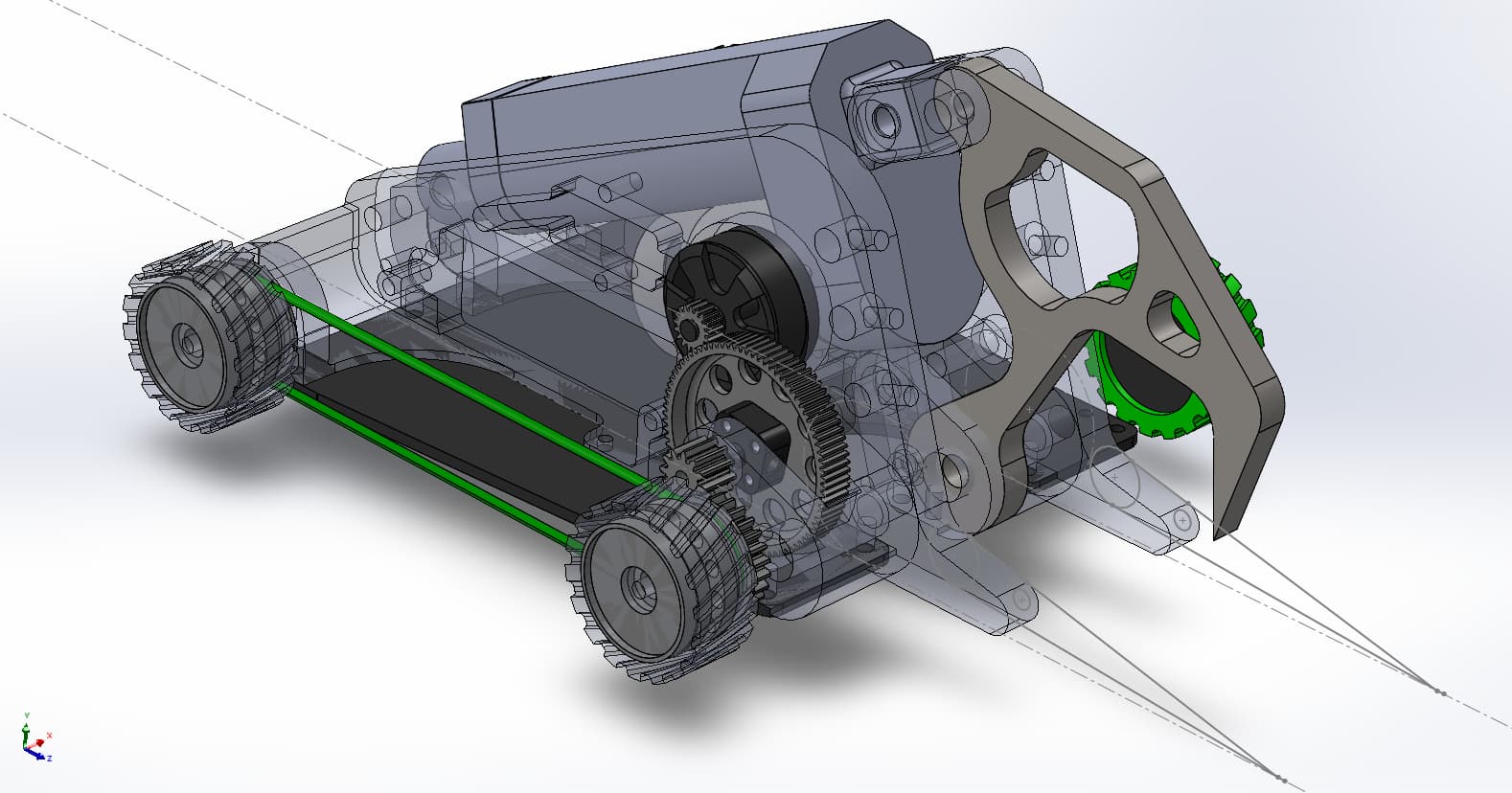
The main feature of this robot is obviously the crushing beak which is driven from a FW sized linear actuator. I junked the stock motor and replaced it with a 55 turn 540 motor which will be run off of 4s and will hate every moment of it. This and the beak as it stands are about 910g so I have about 500g with which to Draw The Rest Of The Owl. This is a monumental challenge but one I’m excited to take on.
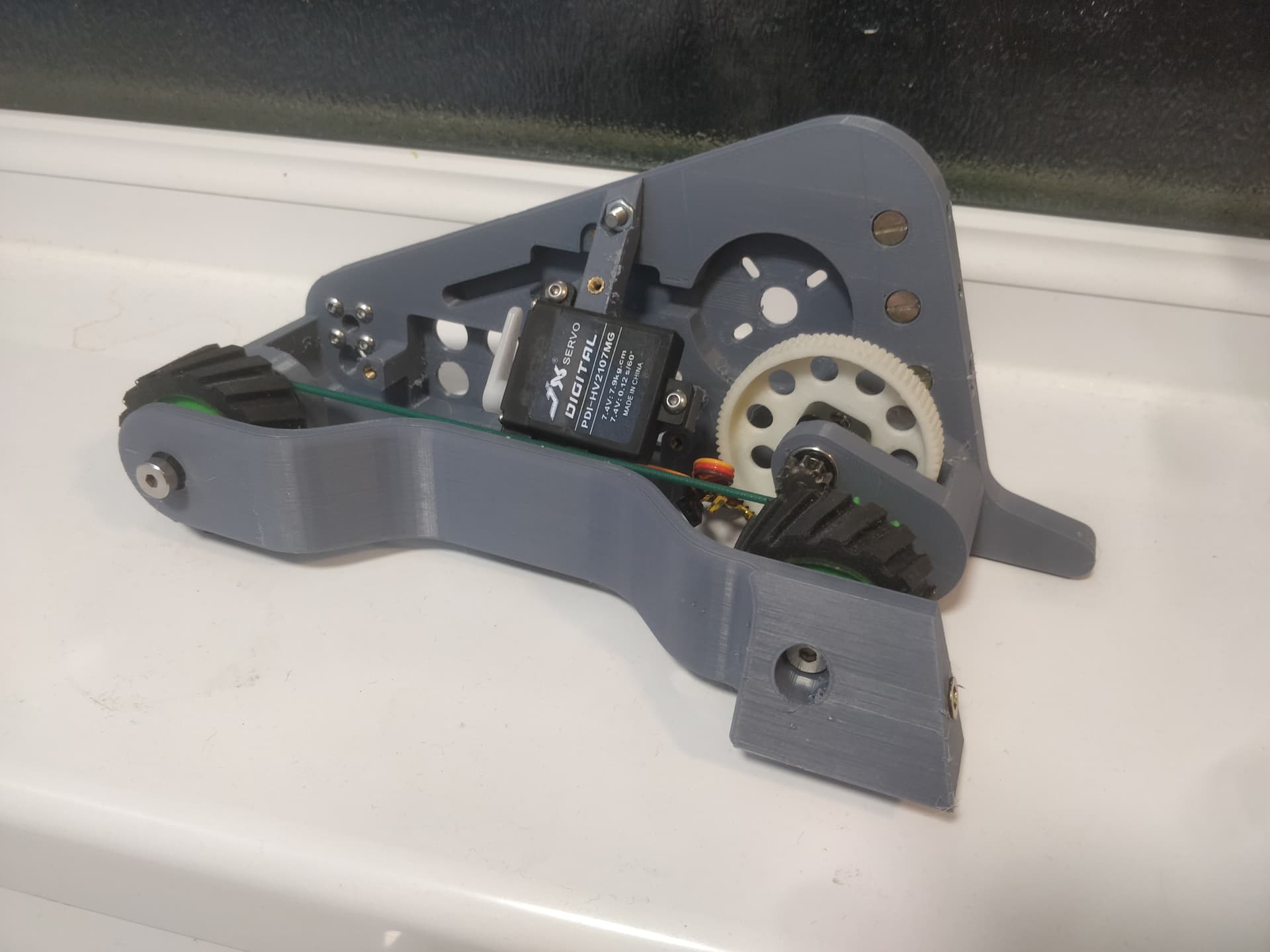
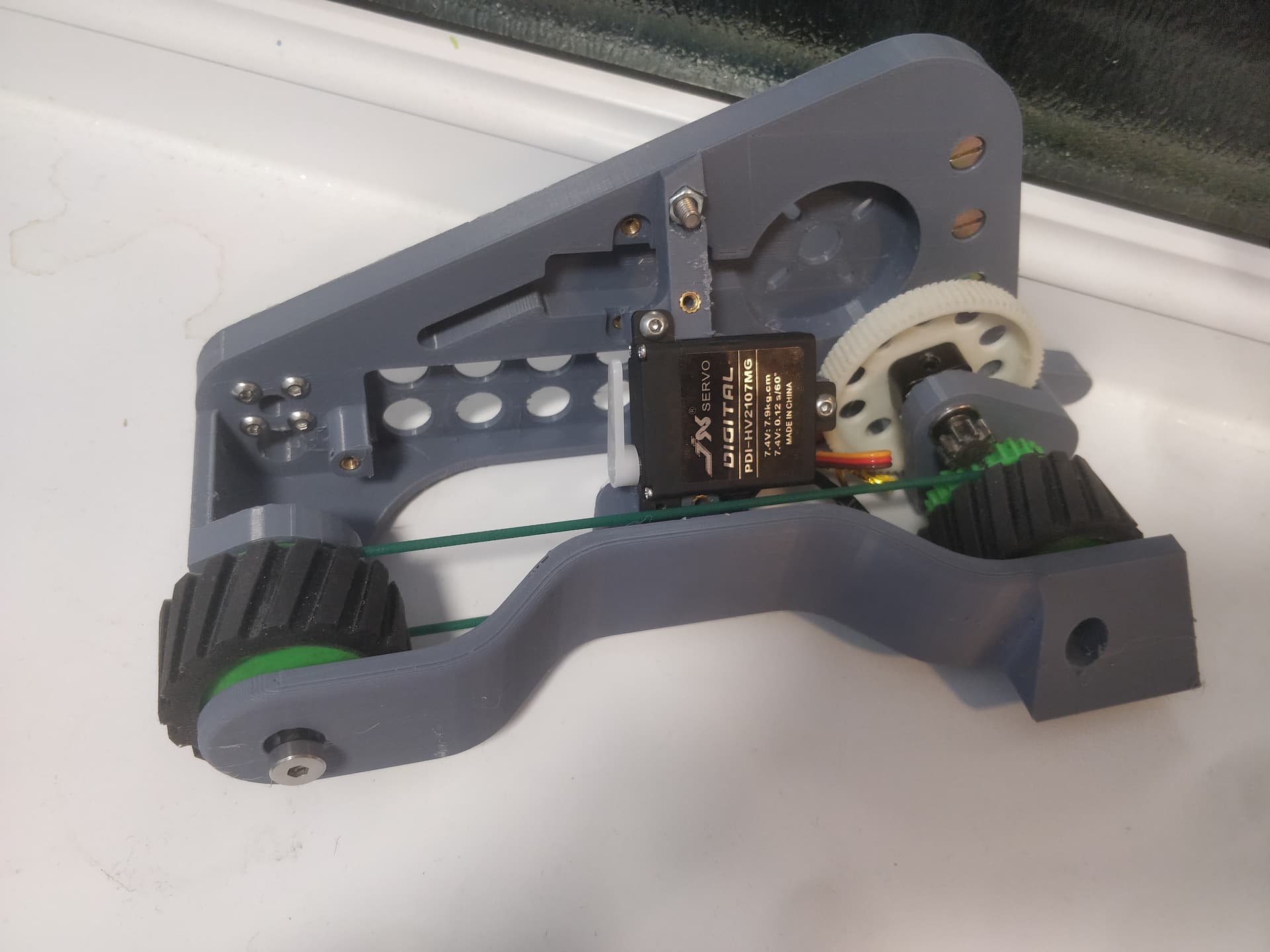
In order to make it simple and light I added some much needed complexity and weight. Yes. Instead of plugging in say, a 25mm and calling it done I have mushed in a structurally integral 2 stage spur nightmare. It’s a mixture of RC pinions and printed gears, tied together with a Mars hub from Ranglebox.
Planning to get this started alongside ML-T34’s improvement binge. I want to get it physical before jumping fully into it or abandoning it so ABS prototypes are on the horizon. Something of a palette cleanser maybe? If it goes badly I am just going to blame the Dutch.